



Введение
При создании роботизированных систем возникает ряд задач, связанных с реализацией точного управления электромеханической частью шасси системы. Как правило, процесс проектирования таких систем управления сопровождается трудностями отладки и выбора аппаратного обеспечения. Часто системы управления шасси требуют реализации дистанционной передачи управляющего сигнала. С этой целью в настоящее время широко применяются блоки радиоуправления, требующие калибровки и согласования частот. В связи с этим во многих случаях целесообразнее применять уже существующие, хорошо отработанные системы цифровой связи – например, Wi-Fi. В работе [3] описывается методика разработки встраиваемых систем управления на основе принципов модельного проектирования. Задачей настоящего исследования является адаптация методики модельного проектирования встраиваемых систем к решению задачи точного дистанционного управления шасси роботизированной платформы с реализацией передачи команд по Wi-Fi LAN в рамках одной среды проектирования – NI LabVIEW 2011.
Описание решения
На рисунке 1 представлена схема процесса проектирования системы управления шасси подвижной роботизированной платформы. Рассматриваемое шасси служит базой для роботизированной системы сбора графической (видеопотока) и акустической информации.
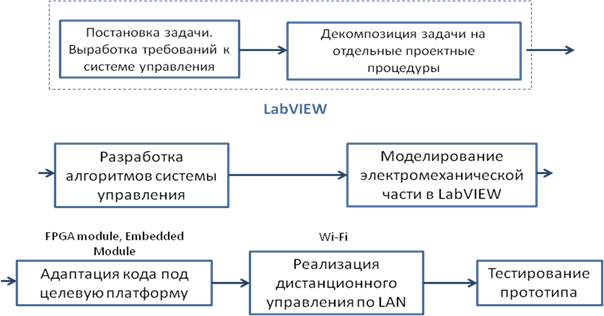
Рисунок 1. Методика модельного проектирования встраиваемой системы управления шасси робота
В качестве среды разработки и моделирования системы управления выбрана NI LabVIEW 2011 с модулями расширения. Бортовым вычислителем выступает микроконтроллер архитектуры ARM – Raspberry PI с установленной ОС Linux. Дистанционное управление подвижной платформой основано на технологии беспроводной LAN и состоит из Wi-Fi роутера, Wi-Fi модуля стандарта USB для микроконтроллера и виртуального подприбора LabVIEW, реализующего соединение хост-компьютера и встраиваемой системы управления по локальной сети, формирование и выдачу пакетов команд управления. На рисунке 2 приведена декомпозиция объекта проектирования на составные части.
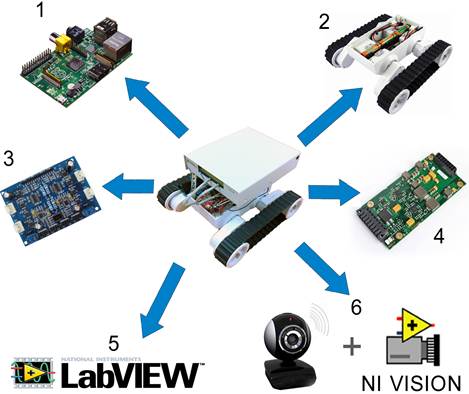
Рисунок 2. Составные части объекта проектирования: 1 – ARM-контроллер Raspberry PI; 2 – Шасси Rover 5 с системой питания; 3 – драйвер электродвигателей; 4 – конвертор уровней TTL/CMOS; 5 – прибор управления в NI LabVIEW 2011; 6 – беспроводная цифровая камера и модуль NI IMAQ
Управление двигателями постоянного тока гусеничной платформы реализовано с помощью программных ШИМ-генераторов, выход которых передается на входы схемы драйвера двигателя. Питание контроллера и двигателей обеспечивается за счет встроенных аккумуляторов платформы, схема питания включает конвертор уровней цифрового сигнала из 3.3V в 5V и обратно. На рисунке 3 представлена структурная схема системы управления объектом проектирования – подвижной гусеничной платформой.
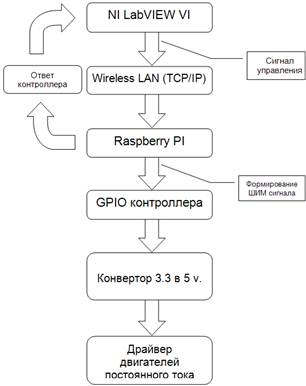
Рисунок 3. Уровни управления подвижной гусеничной платформой
Обратная связь реализуется двумя беспроводными каналами: виртуальный прибор управления, запущенный на хост-компьютере (рис.5), получает от контроллера по LAN данные о принятии команды управления («ОК») и данные о реальном перемещении катков платформы, получаемые от цифровых энкодеров, установленных на шасси. Также на борту подвижной платформы установлена беспроводная цифровая камера, поток данных которой передается по собственному каналу на хост-компьютер и выводится на лицевую панель средствами NI IMAQ. В дальнейшем, полученное изображение (видеосигнал) может быть обработано или сохранено в виде файла различных форматов видеозаписи. Виртуальный прибор управления создается в среде LabVIEW на хост-компьютере, и, согласно техническому заданию, реализует движение вперед и назад с точным дискретным заданием скорости движения и плавный поворот платформы с хода (без остановки), обеспечивая пересчет коэффициентов скоростей вращения гусениц левого и правого борта.
Для того чтобы реализовать такое управление подвижной платформой, необходимо найти способ более точного вычисления коэффициента торможения. Для начала нужно найти зависимость радиуса поворота от скоростей каждого колеса (иными словами выразить радиус ![]() как функцию двух скоростей левого и правого колес:
как функцию двух скоростей левого и правого колес:
![]()
Рассмотрим ситуацию при повороте направо:
Угловая скорость поворота робота равна ![]() , оба его колеса движутся с равной угловой скоростью
, оба его колеса движутся с равной угловой скоростью ![]() .
.
Радиус поворота у обоих колес будет разный и равен, соответственно, ![]() и
и ![]() . Подставим эти значения в формулу и выразим
. Подставим эти значения в формулу и выразим ![]() :
:
![]()
Теперь, зная зависимость ![]() , найдем, как радиус поворота зависит от угла, на который мы желаем повернуть. То есть найдем зависимость
, найдем, как радиус поворота зависит от угла, на который мы желаем повернуть. То есть найдем зависимость ![]() , а затем выразим скорости колес
, а затем выразим скорости колес ![]() как некую функцию желаемого угла.
как некую функцию желаемого угла.
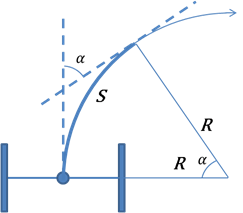
Рисунок 4. Зависимость радиуса поворота от значения желаемого угла поворота
Определим желаемый угол поворота как угол между касательными к траектории движения робота в точках, лежащих друг от друга на неком расстоянии S. Иными словами, через каждый отрезок пути, равный S, новая касательная к траектории робота имеет угол α к предыдущей касательной. Таким образом, мы обеспечим движение по окружности постоянного радиуса с возможностью изменять скорость движения.
Можно заметить, что определенный таким образом угол α равен углу между радиусами окружности, охватывающими дугу длиной S. Длина дуги равна ![]() . Отсюда
. Отсюда ![]()
![]()
Выразим отсюда ![]() :
:
![]()
,где
![]()
Осталось определить, чему должна быть равна константа S. Чем больше будет ее значение, тем более плавным будет получаться поворот. Мы вольны выбирать любое значение (размерность которого будет совпадать с размерностью l) с учетом того, что значение ![]() должно быть всегда положительным.
должно быть всегда положительным.
Если максимально возможный угол поворота будет осуществляться на ![]() , то:
, то:
![]()
Отсюда:
![]()
Переменная l задана конструкцией самого робота и примерно равна ![]()
Тогда ![]()
примем ![]()
Тогда:
![]()
Теперь подставим найденное значение:
![]()
Изначально робот движется по прямой (условие ![]() ). Чтобы повернуть на
). Чтобы повернуть на ![]() в какую-либо сторону, то текущую скорость соответствующего колеса надо разделить на коэффициент
в какую-либо сторону, то текущую скорость соответствующего колеса надо разделить на коэффициент ![]()
Процесс дальнейшего проектирования системы управления организован следующим образом. Техническое задание на проектирование декомпозируется на ряд подзадач. Разрабатываются модели подсистем объекта проектирования. Осуществляется выбор аппаратных средств, создание алгоритмического и программного обеспечения, разработка соответствующей подсистемы и тестирование полученных решений. Каждая группа разработчиков использует модель объекта управления или управляющего устройства (например, модель щеточного электродвигателя в Simulation Module, эмулятор микроконтроллера и т.д.) для верификации полученных решений на каждом этапе проектирования. Отладка электромеханической части производится при помощи прямого подключения драйвера шасси подвижной платформы к управляющему компьютеру через плату сбора данных NI-6251 и защищенный коннектор SCB-68. После отладки коннектор отключается, и вместо него устанавливается созданная встраиваемая система управления на базе контроллера Raspberry PI.
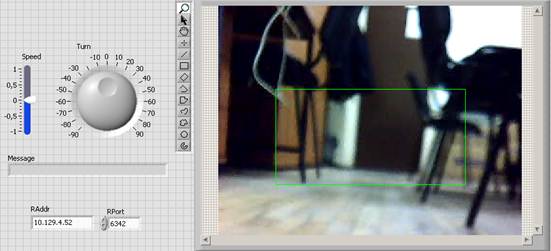
Рисунок 5. Лицевая панель прибора управления
После этого осуществляется композиция созданных подсистем объекта проектирования в единое целое на шасси платформы, проводится финальная отладка системы, настройка сетевых параметров и параметров устройств видео- и аудиозахвата.
Заключение
Разработана и апробирована методика [2] модельного проектирования встраиваемых систем управления шасси подвижных роботизированных объектов. Эффективно применена технология виртуальных инструментов [1], раскрыты широкие возможности современных беспроводных технологий передачи данных для реализации систем дистанционного управления объектами робототехники. Создан и испытан прототип роботизированной платформы, реализующий алгоритмы точного управления движением гусеничной шасси, сбора и обработки визуальной и акустической информации.
Работа выполнена при поддержке Министерства образования и науки РФ в рамках Федеральной целевой программы «Научные и научно-педагогические кадры инновационной России на 2009–2013 годы» (Государственный контракт № 14.B37.21.2021 от 11 ноября 2012 г.).
Рецензенты:
Анисимов Владимир Иванович, д.т.н., проф. кафедры систем автоматизированного проектирования. Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина)», г. Санкт-Петербург.
Сольницев Ремир Иосифович, д.т.н., проф. кафедры систем автоматизированного проектирования. Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина)», г. Санкт-Петербург.
Библиографическая ссылка
Бутусов Д.Н., Красильников А.В., Райцин С.Б., Миронченко Е.А., Клунникова Ю.В. МОДЕЛЬНОЕ ПРОЕКТИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ШАССИ РОБОТИЗИРОВАННОЙ ПЛАТФОРМЫ // Современные проблемы науки и образования. 2013. № 1. ;URL: https://science-education.ru/ru/article/view?id=8133 (дата обращения: 01.07.2026).