



Поливинилформальэтилаль (ПВФЭ) относится к классу поливинилацеталей. ПВФЭ получают методом гетерогенного последовательного ацеталирования поливинилового спирта (ПВС) формальдегидом и ацетальдегидом в водной среде в присутствии минеральной кислоты [1].
Метод производства ПВФЭ периодический. Реакцию ацеталирования можно оборвать на любой стадии, благодаря чему имеется возможность получать поливинилформальэтилаль желаемого функционального состава [2].
Реакция ацеталирования ПВС в воде проходит сначала в гомогенной фазе, т.к. частично ацеталированные продукты еще растворимы в воде, преимущественно холодной. Для того, чтобы по возможности дольше вести реакцию в гомогенной фазе, следует поддерживать низкую температуру. При определенной степени ацеталирования полимер выпадает из раствора в виде тонкой дисперсии, и дальнейшее ацеталирование протекает в гетерогенной среде. Для получения равномерного по составу продукта с высокой степенью замещения особое значение имеет выбор условий проведения процесса, обеспечивающих выпадение осадка частично ацеталированного ПВС в тонкодисперсном состоянии с большой поверхностью раздела между твердой и жидкой фазами. Синтез ПВС в водной среде позволяет избежать сложных и экономически невыгодных операций осаждения полимера из реакционного раствора и регенерации многокомпонентной смеси растворителей [3].
Необходимо отметить ряд факторов, оказывающих существенное влияние на процесс получения ПВФЭ, а именно:
— высокие адгезионные свойства полимера, которые в процессе ацеталирования приводят к налипанию частиц полимера на мешалку, стенки реактора. Кроме того, частицы полимера склонны к образованию укрупненных агломератов, которые не только ухудшают однородность полимера, но и которые просто невозможно отмыть от остаточных количеств кислоты, альдегида и солей.
— на качество и гранулометрический состав ПВФЭ большое влияние оказывает гидродинамический режим перемешивания и скорость вращения мешалки. Регулируя скорость перемешивания можно получать полимер с различным размером частиц. Высокую скорость перемешивания поддерживают и для снижения примесей в гранулах, так как мелкие частицы легче отмыть.
Таким образом, проблема управления мешалкой реактора ацеталирования является актуальной. В данной статье представлено оптимальное управление мешалкой реактора ацеталирования.
Рассматриваемый технологический процесс достаточно продолжительный, протекает около 14 часов [5]. На протяжении этого периода меняется реологическое состояние реакционной смеси. Особенность работы перемешивающего устройства состоит в том, что при низких оборотах вала мешалки происходит налипание полимера (образование агломератов) на ее лопастях. При увеличении скорости перемешивания, процесс налипания полимера прекращается. При высоких оборотах (в соответствии с механической характеристикой работы мешалки) увеличивается момент на валу привода мешалки. Таким образом, при малых оборотах мешалки за счет налипания полимера на ее лопасти момент на валу привода высокий, по мере возрастания скорости вращения мешалки момент снижается за счет снижения полимерных налипаний, но после прохождения через минимальное значение момент на валу привода увеличивается, т.к. он пропорционален квадрату скорости (см. рисунок 1).
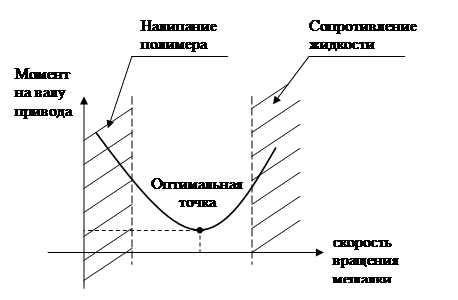
Рисунок 1 – Зависимость момента на валу привода от скорости вращения мешалки
Измерение момента на валу привода может быть заменено измерением силы тока, потребляемого двигателем привода. Определение оптимального значения скорости вращения мешалки, при котором величина тока (потребляемого приводом мешалки) будет минимальна, может быть выполнена непосредственно на процессе, путем одномерного поиска оптимальной скорости вращения.
Для решения этой задачи необходимо использовать частотный преобразователь для питания электродвигателя привода мешалки. Функциональная схема управления приводом мешалки реактора ацеталирования представлена на рисунке 2.
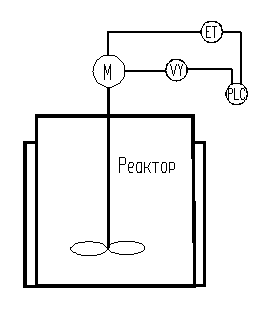
VY – частотный преобразователь регулятора скорости; ET – датчик тока привода мешалки; PLC – контроллер, выполняющий управление приводом.
Рисунок 2 – Функциональная схема управления приводом мешалки реактора ацеталирования
Решению задачи оптимального управления непосредственно на процессе без математической модели имеется одно препятствие, которое состоит в том, что процесс налипания полимера протекает с конечной скоростью, т.е. имеет определенную инерционность. Инерционность процесса налипания полимера на лопасти мешалки искажает зависимость величины тока двигателя, соответствующей установленной скорости вращения его вала, поскольку она изменяется в соответствии с конечной скоростью налипания полимера. Для преодоления этой трудности оптимальное управление работой мешалки можно проводить в импульсном режиме. Интервал дискретности импульсной системы управления может быть найден путем математического моделирования работы системы по условию обеспечения устойчивости процесса поиска оптимальной скорости вращения вала перемешивающего устройства.
Поиск оптимальных условий работы мешалки проводился в соответствии с алгоритмом, представленным на рисунке 3. Сначала производится опрос датчиков, затем присваивается начальное значение скорости вращения мешалки и тока двигателя. Если ток с датчика будет меньше I0, то присваивается это значение тока и шаг изменения скорости увеличивается вдвое. Если ток с датчика больше I0, то происходит инверсия, шаг изменения скорости уменьшается вдвое и поиск направлен в другую сторону.
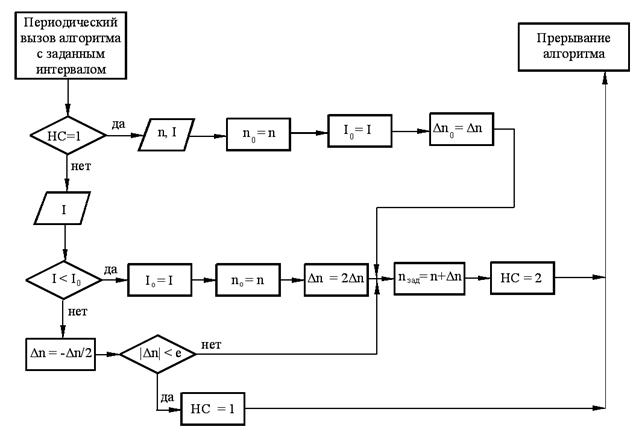
nзад – задание регулятору скорости вращения мешалки; Io – оптимальный ток; Δn – шаг изменения скорости.
Рисунок 3 – Алгоритм поиска оптимальных условий работы мешалки реактора ацеталирования.
Математическое моделирование системы оптимального управления на технологическом процессе работой мешалки выполняется следующим образом [4]:
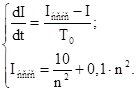
(1)
(2)
где I – текущее значение силы тока привода; Iстат – значение силы тока привода в установившемся (статическом) режиме; Т0 – постоянная времени процесса налипания полимера на лопасти мешалки; n – скорость вращения мешалки; t – координата времени.
Начальные условия определяются значением I при подаче в систему очередного управляющего воздействия по скорости вращения мешалки n.
Для испытания работоспособности алгоритма оптимального управления задаем тестовую функцию зависимости тока привода от скорости вращения вала. Уравнение (2) определяет минимальное значение тока двигателя Iстат = 2 А при скорости n = 3 с-1. Измеренное датчиком значение тока нагрузки I будем имитировать путем интегрирования дифференциального уравнения (1).
Исследования инерционности процесса налипания полимера на лопасти мешалки путем построения ступенчатой переходной характеристики по току двигателя показали, что Т0 ≈ 100 с.
Чем больше величина интервала дискретности Т, тем более устойчивый процесс поиска оптимальной скорости вращения мешалки, но и более длительный процесс нахождения оптимального режима. При значении интервала дискретности Т < 100 с процесс поиска оптимальной скорости вращения вала не работает. Устойчивый процесс оптимального управления, полученный при Т = 100 с представлен в таблице 1.
Таблица 1. Данные динамики определения оптимального режима работы мешалки
|
Время поиска, с |
Скорость вращения мешалки, с-1 |
Ток двигателя, A |
Время поиска, с |
Скорость вращения мешалки, с-1 |
Ток двигателя, А |
|
0 |
6.40 |
4,20 |
1300 |
4,00 |
2,71 |
|
100 |
6,40 |
4,32 |
1400 |
5,28 |
3,03 |
|
200 |
7,04 |
4,66 |
1500 |
4,00 |
2,39 |
|
300 |
6,40 |
4,41 |
1600 |
3,36 |
2,08 |
|
400 |
6,24 |
4,20 |
1700 |
3,36 |
2,02 |
|
500 |
6,24 |
4,16 |
1800 |
2,08 |
2,60 |
|
600 |
5,92 |
3,86 |
1900 |
3,36 |
2,14 |
|
700 |
5,92 |
3,80 |
2000 |
4,00 |
2,20 |
|
800 |
5,28 |
3,28 |
2100 |
3,36 |
2,05 |
|
900 |
5,28 |
3,16 |
2200 |
3,10 |
2,01 |
|
1000 |
4,00 |
2,41 |
2300 |
3,10 |
2,01 |
|
1100 |
4,00 |
2,25 |
2400 |
2,40 |
2,25 |
|
1200 |
1,40 |
4,47 |
2500 |
3,10 |
2,01 |
Оптимальное значение скорости вращения мешалки n0 = 3,1 с-1, при котором ток двигателя I0 = 2,01 А, найдено за время поиска t = 2500 с (около 42 мин). Следует отметить, что стартовое значение скорости nст = 6,4 с-1 значительно отличалось от оптимального значения.
При увеличении интервала дискретности до Т = 150 с, время поиска увеличивается до 50 мин (см.рисунок 4).
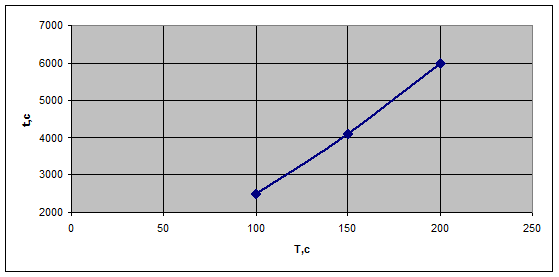
Рисунок 4 – Зависимость времени поиска t от интервала дискретности T
При поиске оптимального режима перемешивания реакционной массы управляющее воздействие (скорость вращения мешалки) изменяется в дискретные моменты времени, отстоящие на интервал Т. В начале каждого интервала дискретности управляющее воздействие изменяется, в течение этого интервала остается постоянным, а в конце интервала считывается значение тока двигателя как реакция на данное управляющее воздействие и формируется новое значение управляющего воздействия. Изменения управляемого параметра I во времени и управляющего воздействия n показаны на рисунке 5.
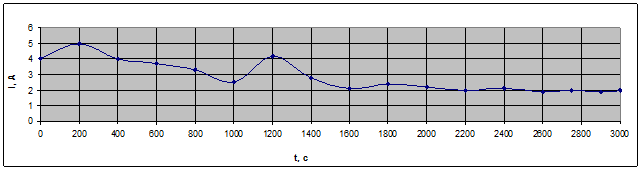
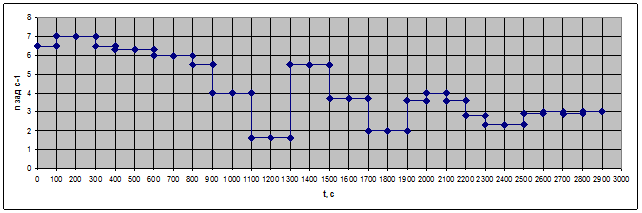
Рисунок 5 – Изменение управляемого параметра I во времени и управляющего воздействия nзад
На рисунке 5 изменение скорости вращения мешалки выполняется дискретно (импульсное управление), а управляемый параметр (ток, потребляемый приводом мешалки) изменяется непрерывно в силу инерционности процесса налипания полимера на лопасти мешалки. Конечное состояние перемешивающего устройства: n0 = 3 с-1; I0 = 2 А.
Аналогичным образом, оптимальное управление работой мешалки реактора ацеталирования может быть выполнено путем поиска оптимального режима на реальном процессе с импульсным изменением скорости вращения.
Рецензенты:
Добротин Сергей Алексеевич, доктор технических наук, профессор, директор ООО «НТЦ «Безопасность», г. Дзержинск.
Сажин Сергей Григорьевич, доктор технических наук, профессор, генеральный директор ООО «НТЦ «АСТ», г. Дзержинск.
Библиографическая ссылка
Рябкова Т.А., Луконин В.П., Мончарж Э.М. ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ МЕШАЛКОЙ РЕАКТОРА АЦЕТАЛИРОВАНИЯ // Современные проблемы науки и образования. 2012. № 6. ;URL: https://science-education.ru/ru/article/view?id=7996 (дата обращения: 23.07.2026).