



Для решения задач виброзащиты при проектировании и эксплуатации технологических машин и оборудования лесного комплекса существенным является построение математических моделей, отражающих зависимости параметров вибрации конструкций. В [4] рассматривается моделирование вибрации механической системы на примере массы фундамента, совершающей поступательные и поворотные перемещения в одной плоскости под воздействием установленного на ней однороторного машинного агрегата (рис. 1).
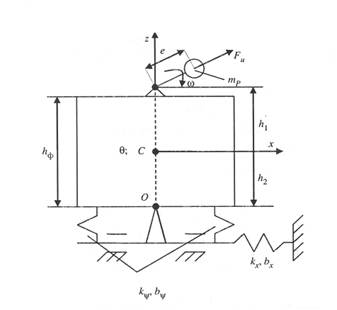
Рис. 1.
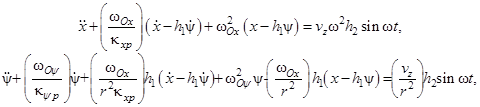
Система дифференциальных уравнений колебаний массы фундамента имеет вид:
 (1)
(1)
здесь ![]() – частота вращения ротора,
– частота вращения ротора, ![]() – горизонтальное перемещение центра массы,
– горизонтальное перемещение центра массы, ![]() – поворотное перемещение массы,
– поворотное перемещение массы, ![]() – расстояние по вертикали от центра масс установки до оси вращения ротора,
– расстояние по вертикали от центра масс установки до оси вращения ротора, ![]() – расстояние по вертикали от центра масс до центра тяжести опоры,
– расстояние по вертикали от центра масс до центра тяжести опоры, ![]() – радиус инерции массы фундамента,
– радиус инерции массы фундамента, ![]() – коэффициент, характеризующий меру уровня возбуждающих колебания сил инерции неуравновешенных масс ротора,
– коэффициент, характеризующий меру уровня возбуждающих колебания сил инерции неуравновешенных масс ротора, ![]() – собственные частоты парциальных колебаний фундамента: горизонтальных и поворотных,
– собственные частоты парциальных колебаний фундамента: горизонтальных и поворотных, ![]()
![]() – коэффициенты, соответствующие резонансу.
– коэффициенты, соответствующие резонансу.
При разработке средств виброзащиты технологических машин одной из проблем математического моделирования является определение характера сил, воздействующих на фундамент при работе ротора, по измерениям наблюдаемых ![]() а также их скоростей
а также их скоростей ![]() Упомянутые силы зависят от характеристики грунтов, влажности и, в конечном счете, от времени. В связи с этим возникает задача определения сил неупругих сопротивлений, зависящих от
Упомянутые силы зависят от характеристики грунтов, влажности и, в конечном счете, от времени. В связи с этим возникает задача определения сил неупругих сопротивлений, зависящих от ![]() и возникающих при взаимосвязи фундамента с грунтом. В цитируемой выше работе предполагалось, что указанные силы входят в систему линейно, что позволяло находить решение полученных уравнений в явном виде.
и возникающих при взаимосвязи фундамента с грунтом. В цитируемой выше работе предполагалось, что указанные силы входят в систему линейно, что позволяло находить решение полученных уравнений в явном виде.
В работах [3; 5] А.В. Кряжимским и Ю.С. Осиповым был предложен метод динамической регуляризации, позволяющий в режиме реального времени моделировать приближение ![]() неизвестного воздействия
неизвестного воздействия ![]() в системе, описываемой обыкновенными дифференциальными уравнениями:
в системе, описываемой обыкновенными дифференциальными уравнениями:
![]() (2)
(2)
по результатам неточных измерений ![]() состояний системы:
состояний системы: ![]() Здесь
Здесь ![]() – евклидова норма,
– евклидова норма, ![]() – узлы разбиения временного промежутка
– узлы разбиения временного промежутка ![]()
![]()
![]() – вектор-функция и
– вектор-функция и ![]() – матрица-функция, отображающие
– матрица-функция, отображающие ![]() в
в ![]() и в пространство матриц размерности
и в пространство матриц размерности ![]() соответственно,
соответственно, ![]() – функция, обладающая минимальной нормой в L2[a,b] среди всех v(t), порождающих движение x(t). Считается известным, что
– функция, обладающая минимальной нормой в L2[a,b] среди всех v(t), порождающих движение x(t). Считается известным, что ![]() – измеримая функция, со значениями из выпуклого компакта
– измеримая функция, со значениями из выпуклого компакта ![]() отображения
отображения ![]() и
и ![]() удовлетворяют условию Липшица по совокупности переменных.
удовлетворяют условию Липшица по совокупности переменных.
Упрощенная схема упомянутого алгоритма, а также его модификация и получение соответствующего ей асимптотического порядка точности в случае постоянства подпространства собственных векторов матрицы ![]() рассматривались в [1]. Коротко остановимся на ее описании:
рассматривались в [1]. Коротко остановимся на ее описании:
а) до начала работы алгоритма задаются положительные числа h, α=α(h), Δ=Δ(h), ![]()
б) выбираются узлы ti (![]() ti+1 - ti = ∆) разбиения промежутка
ti+1 - ti = ∆) разбиения промежутка ![]() ;
;
в) на каждом шаге алгоритма (на временном промежутке [ti, ti+1)) выполняются следующие действия:
1) в момент ti проводят измерение xh(ti) состояния системы x(ti) так, что |xh(ti) - x(ti) | ≤ h;
2) определяется состояние в моменты ti системы – модели с начальным условием w(t0)=xh(t0), функционирующей на [ti, ti+1) по правилу
![]()
где vi – проекция на Q вектора
![]()
Таким образом, результатом работы алгоритма является построение приближения воздействия ![]() в виде кусочно-постоянной функции v(t)=vi при
в виде кусочно-постоянной функции v(t)=vi при ![]() Если вычисление vi требует выполнения конечного числа арифметических операций, то при достаточном быстродействии вычислительного устройства формирование приближения v(t) может быть осуществлено в темпе реального времени. Поэтому рассматриваемый метод получил название конечношагового динамического алгоритма (к.д.а).
Если вычисление vi требует выполнения конечного числа арифметических операций, то при достаточном быстродействии вычислительного устройства формирование приближения v(t) может быть осуществлено в темпе реального времени. Поэтому рассматриваемый метод получил название конечношагового динамического алгоритма (к.д.а).
В работе [1] было показано, что при выборе Δ=h, ![]() и достаточно большом значении
и достаточно большом значении ![]() найдется положительная константа C такая, что
найдется положительная константа C такая, что ![]() (
(![]() – норма в пространстве L1[a,b]).
– норма в пространстве L1[a,b]).
Для практических целей зачастую более удобной является возможность получения оценки на неограниченном временном промежутке в равномерной метрике. Такая возможность для рассматриваемого метода была доказана в работе [2].
Отметим, что замена ![]()
![]() ,
, ![]() приводит (1) к системе вида
приводит (1) к системе вида
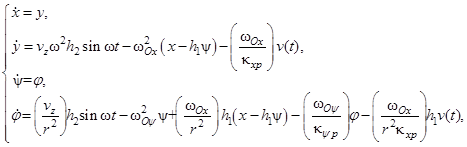 (3)
(3)
которая, очевидно, является частным случаем (2). Метод динамической регуляризации, примененный к (3), позволяет по измерениям ![]() и
и ![]() восстановить характер неупругой силы –
восстановить характер неупругой силы – ![]() . Ниже для модельного примера на рисунке 2(а) продемонстрирована зависимость восстановленного с помощью описанного выше метода воздействия
. Ниже для модельного примера на рисунке 2(а) продемонстрирована зависимость восстановленного с помощью описанного выше метода воздействия ![]() от времени
от времени ![]() , на рисунке 2(б) – зависимость
, на рисунке 2(б) – зависимость ![]() от
от ![]() :
:
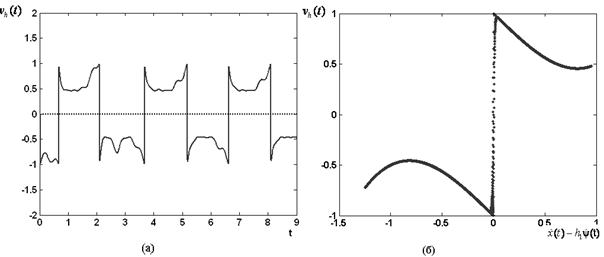
Рис. 2.
Результаты моделирования процесса показывают, что воздействующие силы носят существенно нелинейный характер в отличие от того, как это предполагалось первоначально. Таким образом, метод динамической регуляризации позволяет уточнять рассматриваемые математические модели, что позволяет более адекватно описывать изучаемые процессы.
Рецензенты:
Старжинский В.Н., д.т.н., профессор, заведующий кафедрой ФГБОУ ВПО «Уральский государственный университет», г. Екатеринбург.
Часовских В.П., д.т.н., профессор, декан факультета экономики и управления ФГБОУ ВПО «Уральский государственный университет», г. Екатеринбург.
Библиографическая ссылка
Вдовин А.Ю., Куцубина Н.В., Рублева С.С., Санников А.А. К ВОПРОСУ ОБ УТОЧНЕНИИ МАТЕМАТИЧЕСКОЙ МОДЕЛИ МЕХАНИЧЕСКОЙ СИСТЕМЫ МЕТОДОМ ДИНАМИЧЕСКОЙ РЕГУЛЯРИЗАЦИИ // Современные проблемы науки и образования. 2013. № 1. ;URL: https://science-education.ru/ru/article/view?id=7652 (дата обращения: 04.08.2026).