



Виброакустическая тематика в лесопромышленном комплексе в УГЛТУ разрабатывается с середины 60-х годов прошлого века. В целлюлозно-бумажной промышленности в последние годы упор делается на исследование вибрационных характеристик [1-3], в лесопильно-деревообрабатывающих производствах - на исследовании шумового фактора [4-7].
Для круглопильных станков с нижним надвиганием пилы локализация наиболее шумного узла (узла резания) является наиболее действенным способом снижения излучаемой звуковой мощности. С учетом специфики работы нашего оборудования (присутствие разбрасываемых рабочими органами кусковых отходов, «пескоструйного» эффекта опилок в зоне резания, засмаливание поверхности звукопоглотителя опилками и стружками; разные поперечные сечения сырья и продукции на входе-выходе зоны резания и т.д.) в ряде случаев удалось найти технические решения, не снижающие технологические возможности станка. Одним из предложений автора данной статьи являются технические решения по а/свидетельствам СССР № 85 2552 и 10 36531, направленные на локализацию зоны резания в частности станка ЦКБ-40 Тюменского станкозавода.
Цель исследований
Целью работы является оптимизация основных размеров шумозащитного устройства для круглопильных станков с нижним надвиганием пилы на основе кинематической схемы, включающей в себя классические виды рычажных механизмов: кривошипно-ползунный и синусный.
Описание конструкции устройства
Устройство разведения боковых стенок 5 и 10, которое служит для установки (продвижения) торцуемой заготовки, состоит из дезаксиального кривошипно-ползунного механизма (КПМ: шатун 6, кривошип 7), синусного механизма - рычага 7 (удлиненный шатун) с роликом 8 на конце и толкателя - боковой стенки 5 и 10.
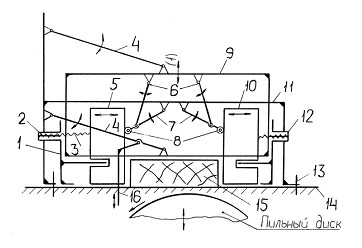
Рис. 1. Кинематическая схема звукоизолирующего устройства с боковыми раздвижными стенками: 1 - направляющие наружного кожуха; 2 - стержень направляющий; 3 - пружина возврата боковой стенки; 4 - рычаги параллелограмма подъема внутреннего кожуха; 5, 10 - стенки боковые раздвижные; 6 - шатун (тяга) КПМ; 7 - кривошип (рычаг синусного механизма); 8 - ролик рычага синусного механизма; 9 - внутренний подвижный кожух; 11 - рама устройства; 12 - втулка пружины; 13 - элемент крепления устройства к столу; 14 - стол станка; 15 - заготовка; 16 - рычаг толкателя.
На рис. 2 КПМ изображен в четырех положениях.
Методика расчета
При расчетах воспользуемся следующими обозначениями: r - радиус кривошипа (на рис. 2 показаны четыре его положения 0 - 1″; 0 - 2″; 0 - 3″; 0 - 4″); d - дезаксиал (откладывается в правую сторону от оси движения ползуна); а - длина рычага синусного механизма (его положения 0 - 1′″; 0 - 2′″; 0 - 3′″; 0 - 4′″); - длина шатуна (положения шатуна обозначены как 1′ - 1″; 2′ - 2″; 3′ - 3″; 4′ - 4″); у - высота ползуна над горизонталью (на рис. 2 показана для положения ползуна 3′).
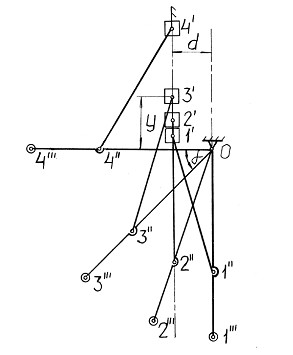
Рис. 2. Кинематическая схема КПМ.
На рис. 2 показаны четыре возможных момента работы КПМ шумозащитного устройства. Два из них (1 и 4) характеризуются крайним положением элементов механизма; на двух других элементы показаны в промежуточных точках, т.е. 1 - рычаг в вертикальном положении 0 - 1″′; ролик в самом нижнем положении 1″′, угол между рычагом 0 - 1″′ и горизонталью α = 90°; ползун в самом нижнем положении 1′; 2 - шатун в вертикальном положении 2′ - 2″; угол между рычагом 0 - 2″′ и горизонталью α = arccos  , ползун поднялся в положение 2′; 3 - рычаг в промежуточном положении 3″′; ползун в положении 3′, 0 < α < arccos ; 4 - рычаг в горизонтальном положении 0 - 4″′, ролик в крайнем положении 4″′, ползун в самом верхнем положении 4′, в этом случае
, ползун поднялся в положение 2′; 3 - рычаг в промежуточном положении 3″′; ползун в положении 3′, 0 < α < arccos ; 4 - рычаг в горизонтальном положении 0 - 4″′, ролик в крайнем положении 4″′, ползун в самом верхнем положении 4′, в этом случае  α = 0.
α = 0.
КПМ управляется внутренним (подвижным) кожухом (ведущее, входное звено - ползун в классической схеме КПМ). Кожух может подниматься над столом станка, поворачивая при этом с помощью шатуна кривошип (рычаг) КПМ на угол α.
Для решения задачи, сформулированной нами выше, необходимо связать угол поворота рычага α с толщиной заготовки t. Функция положения для дезаксиального КПМ при ведущем ползуне (в случае, когда дезаксиал откладывается ниже оси движения ползуна) выражается формулой
 (1)
(1)
где 
S - перемещение ползуна.
Поскольку х0 в нашей задаче - наибольшая высота ползуна над горизонталью, а S - перемещение его вниз с самого верхнего положения, то
y = x0 - S . (2)
Вместе с тем величина у определяет положение ползуна относительно верхнего среза наружного кожуха всего устройства, как показано на рис. 3. В соответствие с этим
y = t + z1 - z2 , (3)
поэтому формула (1) принимает окончательный вид
(4)
Результаты расчетов
Таким образом, для заданной толщины материала t величина a по формуле (4) определяет угол поворота рычага (кривошипа) относительно горизонтали. При этом, если ширина заготовки достаточно мала по сравнению с толщиной t, внутренний кожух опустится на поверхность заготовки (выполнив функцию прижима), а рычаги КПМ (их два по рис. 1) не позволят боковым подвижным стенкам шумозащитного устройства зажать заготовку (скопировать ее сечение) с обеих сторон, препятствуя тем самым локализации зоны резания вблизи заготовки. Другими словами, угол, под которым рычаги располагаются относительно горизонтального уровня, будет слишком мал (рис. 3).

Рис. 3. Расчетная схема: у - высота ползуна над верхней поверхностью неподвижного наружного кожуха; z1 - высота внутреннего кожуха; t - толщина заготовки.
Если ширина заготовки b достаточно велика по сравнению с толщиной t, то боковые стенки зажмут заготовку с обеих сторон, а внутренний кожух будет продолжать опускаться до ее поверхности. При этом рычаги (кривошип КПМ) после зажатия заготовки боковыми стенками будут продолжать поворачиваться на больший угол до тех пор, пока внутренний кожух не коснется верхней поверхности заготовки. В этом случае локализация зоны резания будет наилучшей.
Таким образом, для лучшей локализации зоны резания толщина заготовки t должна определять ее минимальную ширину bmin. Очевидно, bmin можно определить по величине угла a, под которым рычаги КПМ располагаются относительно горизонтального уровня в соответствии с заданной толщиной заготовки t:
bmin = x + 2 a cos α , (5)
где х - расстояние между осями поворота кривошипов.
Таким образом, для определения bmin по заданной толщине доски t следует вычислить угол a по формуле (4), а затем по формуле (5) - величину bmin.
Пример числового расчета
Приведенные выше аналитические зависимости проиллюстрируем числовым примером.
Дано: d = 50 мм; а = 203 мм; λ = 195 мм; х = 58 мм; r = 203 - 15 к,
где к = 1, ..., n; 15 мм - шаг шарнирного соединения шатуна и кривошипа. При к = 1, r = 188 мм.
Положение ползуна 1′ (рис. 2) относительно горизонтального уровня определяется углом a = 90° и составляет разность высот внутреннего и наружного кожухов z1 - z2. Эту разность можно определить по формуле из [7]

где 
Приведенное выражение после подстановки значений λ и ν можно записать как  В частности, если предусмотреть, чтобы исходное положение внутреннего подвижного кожуха (когда он стоит на поверхности стола станка) соответствовало углу α = 90°, то разность высот внутреннего и наружного кожуха будет определяться зависимостью
В частности, если предусмотреть, чтобы исходное положение внутреннего подвижного кожуха (когда он стоит на поверхности стола станка) соответствовало углу α = 90°, то разность высот внутреннего и наружного кожуха будет определяться зависимостью 
 Например, для t = 25 мм (ходовой размер по ГОСТу «Пиломатериалы хвойных пород» получим bmin = 250 мм. Это соответствует ширине заготовки по ГОСТу 250 мм и 275 мм. Так, изменяя, например, величину r (т.е. место шарнирного соединения шатуна и кривошипа), обеспечиваем работу вышерассмотренного устройства на стандартных сечениях заготовки.
Например, для t = 25 мм (ходовой размер по ГОСТу «Пиломатериалы хвойных пород» получим bmin = 250 мм. Это соответствует ширине заготовки по ГОСТу 250 мм и 275 мм. Так, изменяя, например, величину r (т.е. место шарнирного соединения шатуна и кривошипа), обеспечиваем работу вышерассмотренного устройства на стандартных сечениях заготовки.
С учетом этого было предложено техническое решение, защищенное ас. № 1036531 (Б.И. № 31, 1983), согласно которому по длине кривошипов в приспособлении для разведения боковых стенок выполнены гнезда для осей шарниров, соединяющих кривошипы с шатунами.
Заключение
Полученные зависимости для основных размеров шумозащитного устройства на основе кривошипно-шатунной и синусной схем, доведенные до инженерного числового расчета, могут быть использованы конструкторами деревообрабатывающего оборудования.
Рецензенты
Гороховский Александр Григорьевич, д.т.н., профессор, гендиректор ОАО «Уральский научно-исследовательский институт переработки древесины», г. Екатеринбург.
Комиссаров Анатолий Петрович, д.т.н., профессор Уральской государственной сельскохозяйственной академии, г. Екатеринбург.
Библиографическая ссылка
Черемных Н.Н. МЕТРИЧЕСКИЙ СИНТЕЗ КИНЕМАТИЧЕСКОЙ СХЕМЫ НА ОСНОВЕ СИНУСНОГО И КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА ДЛЯ КРУГЛОПИЛЬНЫХ СТАНКОВ С НИЖНИМ НАДВИГАНИЕМ ПИЛЫ // Современные проблемы науки и образования. 2012. № 5. ;URL: https://science-education.ru/ru/article/view?id=7279 (дата обращения: 01.07.2026).