



Важным направлением совершенствования бортовых вычислительных систем (БВС) является их миниатюризация одновременно с улучшением технических характеристик и показателей надежности. С этих позиций для построения бортовых систем управления и сбора данных перспективна концепция «система на кристалле» (System On Chip, SoC), внедрение которой является одним из приоритетных подходов в развитии отечественной электроники [3].
В классическом понимании «система на кристалле» - это интегрированная система потоковой обработки данных, имеющая в своем составе конечный автомат управления, в качестве которого может выступать, например, микропрограммный автомат или микропроцессор и набор контроллеров, решающих вычислительные и интерфейсные задачи с помощью аппаратных средств. Сложившаяся традиция возлагать на центральный процессор общего назначения задачи обработки потоков данных не всегда технически оправданна, особенно в бортовых системах, где остро стоит проблема производительности, габаритов, энергопотребления.
Общая характеристика БВС
Как правило, БВС малых космических аппаратов (КА) отечественного изготовления реализуются в двух вариантах:
- многопроцессорные, собранные на одной плате;
- модульные БВС кластерного типа.
Независимо от варианта исполнения в БВС присутствует устройство коммутации информационных потоков, например в виде одного или нескольких программируемых логических интегральных схем (ПЛИС). Коммутатор на основе ПЛИС связан с каждым из вычислительных модулей. Кроме того, ПЛИС может применяться как в качестве коммутирующего устройства, так и в качестве отдельного высокопроизводительного микропроцессора, построенного по технологии SoC.
Одним из решений, включающим в себя вышеуказанные технологии, является БВС, реализованная на базе трех вычислительных модулей, работающих параллельно [3]. БВС реализуется как специализированный вычислительный комплекс. Вычислительные модули связаны между собой через магистральную шину CAN. Каждый из вычислительных модулей реализован на микроконтроллере серии LPC2000 фирмы Philips. Коммутация потоков данных от подсистем бортового комплекса управления (БКУ) на выбранный вычислительный модуль, а также проверка форматов сообщений (протоколов) осуществляется аппаратным устройством на основе микросхемы ПЛИС серии Cyclon фирмы Altera. Для задания конфигурации ПЛИС к ней подключается внешнее загрузочное постоянное запоминающее устройство. Быстродействие каждого из трех вычислительных модулей составляет около 24x106 коротких операций в секунду. Кроме того, ПЛИС позволяет на ее основе реализовать дополнительный, специализированный 32-разрядный вычислительный модуль с быстродействием до 50x106 коротких операций в секунду. Основные технические характеристики БВС приведены в таблице 1.
Таблица 1 - Основные характеристики БВС
|
Наименование параметров |
Значение |
|
Напряжение питания, В |
8...30 |
|
Потребляемая мощность комплекса, Вт |
1...5 |
|
Масса, кг |
0,2 |
|
Быстродействие, млн оп/с: микропроцессор ПЛИС система в целом |
60 50 230 |
|
Емкость памяти, кб: ППЗУ ОЗУ внешняя |
768 48 10240 |
|
Габаритные размеры, мм |
100x200 |
|
Внешние интерфейсы |
RS-232(8), CAN (2), РК(20), I2C(1),USB (1) |
Структура БВС и технические средства вычислительных модулей позволяют выполнять полный объем вычислений при отключении одного вычислительного модуля и основные задачи управления при отключении двух модулей. На рисунке 1 приведена обобщенная структура вычислительного модуля (микропроцессор с коммутирующим устройством и блоками памяти) бортовой вычислительной системы одноплатного типа.
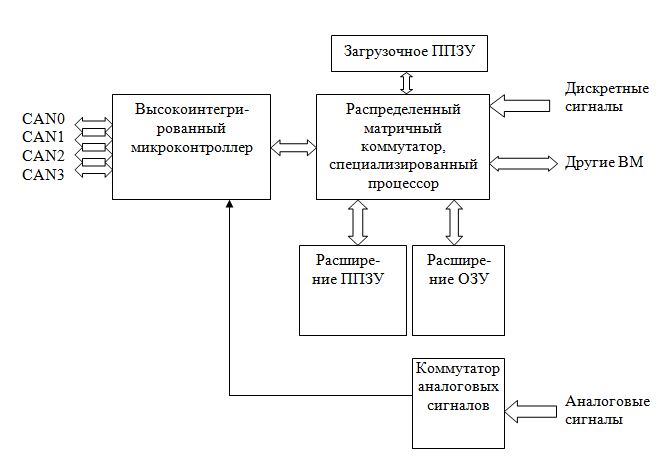
Рис. 1. Структура вычислительного модуля (ВМ).
Общие принципы функционирования предложенной БВС заключаются в следующем. Использование коммутирующей матрицы на основе ПЛИС позволяет выполнять реконфигурирование системы и перераспределение целевых задач БКУ по вычислительным модулям в ходе работы. Надежность вычислений обеспечивается наличием автономных (в каждом вычислительном модуле и ПЛИС) сторожевых таймеров и формированием точек «отката» для повторного старта задач с ближайшего к сбою места. В состав программного обеспечения БВС входят следующие основные компоненты: диспетчер задач, модули целевых задач (например, управление движением, навигация и т.д.), модуль управления каналами обмена информацией (модуль ввода/вывода), модули встроенного контроля, конфигурирования, взаимодействия с технологической аппаратурой.
Описание принципа перестроения структуры БВС
Надежность представленной структуры БВС определяется надежностью основных ее элементов-микропроцессоров и коммутирующего устройства (ПЛИС). Микропроцессоры обладают меньшей надежностью, вследствие чего применена аппаратная избыточность, равная двум, но, как видно из расчетов [3], надежность БВС при дублировании основных элементов и при троировании незначительно отличается. Стабильная работа БВС на борту КА осложняется воздействием на нее ряда факторов космического пространства (ФКП). Из работы [1] известно, что ионизирующее излучение является основным ФКП, оказывающим деструктивные воздействия на электронную компонентную базу (ЭКБ) КА (БВС, в частности) и основной причиной большинства идентифицированных отказов бортовой аппаратуры КА. Следствием воздействия ионизирующего излучения (ИИ) на интегральные микросхемы (ИМС) являются одиночные и дозовые эффекты. В статьях [4; 6] проведен анализ способов, позволяющих снизить влияние одиночных эффектов воздействия ИИ, среди которых можно выделить следующие: экранирование, внесение различных типов избыточности, применение более стойкой к воздействию ИИ ЭКБ. Дозовые эффекты выражаются в накоплении предельного уровня радиации, при котором наступает полный отказ ИМС, что в большинстве случаев является следствием электростатического пробоя полупроводниковых элементов [1]. Также в работе [2] приводятся результаты экспериментов, которые можно сформулировать в виде следующих тезисов:
- предельная доза накопленной радиации в неактивном режиме (при отсутствии напряжения питания) в несколько раз выше, чем в активном режиме;
- при выборе оптимального режима переключения предельная накопленная доза радиации (ПНД) резервированной системы в активном режиме будет приближаться к ПНД системы в выключенном состоянии;
- при меньших дозах накопленной радиации в активном режиме ПНД системы выше (рис. 2);
- время нахождения ИМС в неактивном режиме должно быть таким, чтобы накопленная за это время доза была не менее дозы, накопленной за время нахождения ИМС в активном режиме.
В результате, имея информацию о дозе накопленной радиации (![]() ) и возможность переключения между режимами функционирования микропроцессоров, можно производить управление режимами функционирования с целью повышения ПНД, что может дать существенное увеличение среднего времени наработки до отказа БВС.
) и возможность переключения между режимами функционирования микропроцессоров, можно производить управление режимами функционирования с целью повышения ПНД, что может дать существенное увеличение среднего времени наработки до отказа БВС.
Одним из критериев выполнения переключений является условие завершения выполняемого алгоритма в текущее время; поскольку целевые задачи, решаемые БВС КА, состоят из набора алгоритмов [5], то время функционирования одного ВМ не должно быть меньше ![]() , где
, где ![]() - текущее время функционирования микропроцессора от момента включения до времени начала i-гo алгоритма
- текущее время функционирования микропроцессора от момента включения до времени начала i-гo алгоритма  - время, требуемое для выполнения i-го текущего алгоритма. Как упоминалось выше, еще одним критерием переключения режимов функционирования является условие достижения заданного уровня накопленной радиации в активном режиме. Из рисунка 2 следует, что при меньших дозах накопления радиации предельная доза накопленной радиации больше.
- время, требуемое для выполнения i-го текущего алгоритма. Как упоминалось выше, еще одним критерием переключения режимов функционирования является условие достижения заданного уровня накопленной радиации в активном режиме. Из рисунка 2 следует, что при меньших дозах накопления радиации предельная доза накопленной радиации больше.
Рис. 2. Зависимость дозы радиационного отказа ИМС D от дозы ΔD, накопленной за период в активном режиме.
Еще одним немаловажным фактором космического пространства является нагрев и охлаждение БВС, вызванный освещением солнцем и работой бортовой аппаратуры. При критических температурах в сочетании с воздействием ИИ вероятность возникновения сбоев и отказов вычислительной техники увеличивается.
Рекомендации по реализации предложенного способа
Реализацию управления режимом переключения предлагается возложить на программно-аппаратный комплекс - блок управления реконфигурацией (БУР), на вход которого подается информация о дозе накопленной радиации, температуре БВС, о результатах выполнения контрольных и диагностических операций, времени выполнения текущей задачи. БУР должен осуществлять контроль над накоплением радиации каждым ВМ, температурой БВС и выполнять своевременные переключения, руководствуясь алгоритмами, основанными на упомянутых выше тезисах.
Сопоставляя представленную ранее структуру ВМ и БУР, можно сформулировать предложения по реализации последнего в структуре БВС. На рисунке 3 представлен пример структурной схемы БВС с использованием БУР.
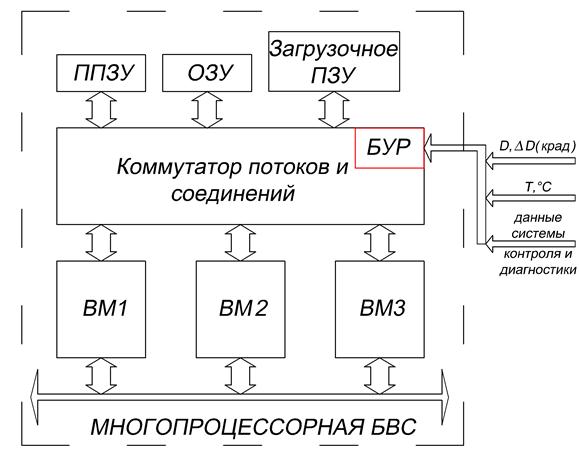
Рис. 3. Пример структурной схемы реализации БУР.
Алгоритм работы БУР заключается в реализации следующих этапов.
- Отслеживание уровня накопленной дозы радиации и интенсивности его изменения. В зависимости от измеренных параметров определяется необходимость выполнения реконфигурации БВС.
- Контроль температурного режима. При достижении критического уровня выдается команда на отключение (включение БВС осуществляется от контактного температурного датчика).
- Контроль состояния энергосистемы КА. При недостаточной емкости энергетической системы производится минимизация энергопотребления или выдача команды на запись контрольной точки и выключение БВС.
- Прием информации от системы контроля и диагностики БВС и составление временного графика переключений с учетом полученной информации о сбоях, отказах и их предыстории.
Заключение
Представленный способ реализации БУР в составе существующей многопроцессорной БВС не влечет за собой существенных изменений в аппаратной части, что упрощает внедрение предложенного устройства. С другой стороны, оптимальное управление переключением режимов функционирования модулей БВС может позволить увеличить ее предельно накопленную дозу радиации на величину до 50% (рис. 2). Это улучшит такие характеристики БВС, как вероятность безотказной работы, средняя наработка до отказа и др.
Рецензенты:
- Басыров Александр Геннадьевич, д.т.н., доцент, начальник кафедры информационно-вычислительных систем и сетей Военно-космической академии имени А.Ф. Можайского, г. Санкт-Петербург.
- Арсеньев Владимир Николаевич, д.т.н., профессор кафедры бортовых информационных измерительных комплексов Военно-космической академии имени А.Ф. Можайского, г. Санкт-Петербург.
Библиографическая ссылка
Лысенко А.В., Кремез Г.В. МНОГОПРОЦЕССОРНАЯ ПЕРЕСТРАИВАЕМАЯ БОРТОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА С БЛОКОМ УПРАВЛЕНИЯ РЕКОНФИГУРАЦИЕЙ // Современные проблемы науки и образования. 2012. № 4. ;URL: https://science-education.ru/ru/article/view?id=6787 (дата обращения: 28.07.2026).