



Этот недостаток отсутствует в СО, где в качестве ИО используются реактивные двигатели-маховики (управляемые по скорости двигатели-маховики - УДМ), работающие в режиме изменения кинетического момента (1) [1]:
![]() (1)
(1)
Конструктивно УДМ выполняется в виде электродвигателя с маховой массой, устанавливаемой на его валу (рис.1).
Из-за хороших регулировочных характеристик вентильного электродвигателя и динамических качеств в целом ИО УДМ широко используются в СО, длительно существующих КА на околоземных орбитах.
Долговечность УДМ во многом определяется долговечностью шарикоподшипников, работа которых обеспечивает ресурс ИО многие годы без регламентных работ. В процессе эксплуатации ИО происходит длительный, постепенный износ подшипника, причинами которого могут быть: превышение заданного предельного значения момента трения в опоре, потеря точности вращения ротора, тепловые деформации, нарушение установленного предварительного натяга, увеличение осевых и радиальных смещений центра ротора [2].
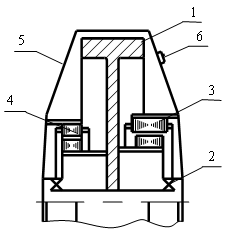
Рис.1. Электродвигатель-маховик (1 - маховик с явно выраженным ободом, 2 - шарикоподшипниковые опоры, 3 - электродвигатель, 4 - датчик скорости, 5 - кожух, 6 - герметичный разъём)
Целью данной научно-исследовательской работы (НИР) является аналитическое исследование технических характеристик проектирования УДМ для малого космического аппарата. Как уже говорилось,УДМ широко используется во всех системах ориентации длительно существующих околоземных КА и орбитальных космических станций. Это обусловлено экономией рабочего тела (топлива или газа) для микрореактивных двигателей на борту, а также высокой точностью ориентации, надежностью, экологической чистотой и возможностью сохранения «прозрачной среды» вокруг объекта, необходимой для работы бортового оптического оборудования [4]. Основным типом УДМ, исходя из выше изложенного в настоящее время, определился двигатель-маховик с использованием бесконтактного двигателя постоянного тока.
При проектировании УДМ одной из первоочерёдных и наиболее важных решаемых задач является определение долговечности его шарикоподшипниковых опор (т.е. расчёт ресурса в целом ИО). Экспериментальные данные, полученные к настоящему времени, представляют собой результаты испытаний подшипников качения на усталость. Однако отказ высокоскоростных шарикоподшипников УДМ не связан с усталостными явлениями. Поэтому методика расчёта (2) долговечности подшипников УДМ является малоэффективной [3]:
![]() (2)
(2)
где h - долговечность подшипников в час;
n - скорость вращения в об/мин;
c - коэффициент работоспособности для подшипников;
Q - приведённая нагрузка в кГ.
Более технически обоснованно проводить расчёт ресурса ИО, исходя из вероятности отказа работы подшипников. Ввиду наличия различных факторовв процессе производства подшипников их долговечность является случайной величиной. Поэтому характеристики долговечности и надёжности приборных подшипников качения есть величины вероятностные. Основными количественными характеристиками, наиболее полно определяющими долговечность подшипника, являются функции распределения F(t) и плотность распределения ![]() [3].
[3].
Вероятность безотказной работы ![]() в течение заданного времени
в течение заданного времени ![]() выражается через функцию распределения (3):
выражается через функцию распределения (3):
![]() (3)
(3)
Для приборных подшипников функция распределения наилучшим образом описывается формулой Вейбулла (4):
![]() (4)
(4)
где a - параметр сдвига;
b - параметр масштаба;
k - параметр износа.
В тех случаях, когда износ не определяет долговечности подшипников, параметр k принимается равным единице.
Оценки параметров двухпараметрического экспоненционального распределения ![]() и
и ![]() (при
(при ![]() ) вычисляются по формулам (5) и (6):
) вычисляются по формулам (5) и (6):
![]() , (5)
, (5)
 . (6)
. (6)
Здесь ![]() - средняя наработка на отказ, равная:
- средняя наработка на отказ, равная:

где n - число испытуемых подшипников;
ti - время безотказной работы i-го подшипника, причём t1 - наименьшее из них.
Статическая функция распределения аппроксимируется функцией (7), имеет вид:
![]() (7)
(7)
При совпадении функций ![]() нижние доверительные границы определяются по формулам (8) и (9):
нижние доверительные границы определяются по формулам (8) и (9):
![]() (8)
(8)
![]() . (9)
. (9)
Коэффициенты k1 и k2 зависят от числа испытуемых подшипников и нижних доверительных границ (выбираются из соответствующих таблиц [3]). Нижняя доверительная граница функции распределения и соответствующая функция надёжности (рис.2, рис.3) строятся по формулам (10) и (11):
![]() (10)
(10)
а) б)
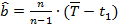
Рис. 2. а) ![]() - нижние доверительные границы функции распределения и функции надёжности (партия 25 шт.), б) вероятность безотказной работы (партия 25 шт.)
- нижние доверительные границы функции распределения и функции надёжности (партия 25 шт.), б) вероятность безотказной работы (партия 25 шт.)
в) г)
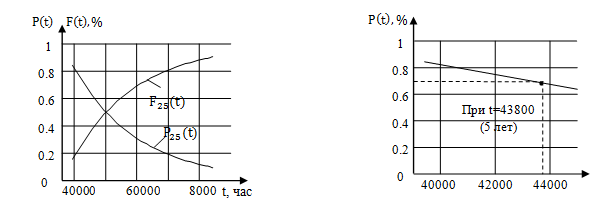
Рис. 3. в) ![]() - нижние доверительные границы функции распределения и функции надёжности (партия 50 шт.), г) вероятность безотказной работы (партия 50 шт.)
- нижние доверительные границы функции распределения и функции надёжности (партия 50 шт.), г) вероятность безотказной работы (партия 50 шт.)
Кривые (рис. 2 а) и рис.3 в)) построены на основании статической обработки результатов испытаний партии подшипников серии 1006095Е в количестве 25 шт. и 50 шт. По требованию технического задания ресурс УДМ не менее 5 лет. Согласно расчёту (11), при испытании 25 шт. подшипников на графике (рис.2, б)) для времени эксплуатации лет надёжность составляет 70 %, а при испытании 50 шт. подшипников (рис.3, г)) надёжность составляет уже 84 %. Очевидно, что при увеличении партии испытуемых подшипников надёжность возрастает. По полученным теоретическим результатам проводимой НИР для создания ИО миниспутника, можно сказать, что при условии проведения испытаний партии в количестве 100 шт. надёжность работы шарикоподшипниковых опор в течение 5 лет эксплуатации будет составлять практически 100 %.
Полученные результаты безотказной работы опор является в определённой степени заниженными, т.к. не учитываются комфортные условия эксплуатации шарикоподшипниковых опор УДМ в части механических нагрузок. Как показал опыт эксплуатации УДМ на десятках спутниках связи серии «Космос», «Луч», «Sesat», за весь срок их эксплуатации ни одного случая отказа шарикоподшипниковых опор не имелось [5].
Поэтому представленная методика позволяет получить технически обоснованные нижние доверительные границы надёжности шарикоподшипников и с учётом корреляции по фактическим результатам эксплуатации указанных опор с достаточной степенью достоверности показывает долговечность эксплуатации проектируемого УДМ.
Рецензент-
Люкшин Б.А., д.т.н., профессор, зав. кафедрой механики и графики Томского государственного университета систем управления и радиоэлектроники, г. Томск.
Библиографическая ссылка
Дмитриев В.С., Дмитриева Е.М. ОПРЕДЕЛЕНИЕ РЕСУРСА ИСПОЛНИТЕЛЬНОГО ОРГАНА НА БАЗЕ УПРАВЛЯЕМОГО ПО СКОРОСТИ ДВИГАТЕЛЯ-МАХОВИКА СИСТЕМЫ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА. // Современные проблемы науки и образования. 2012. № 2. ;URL: https://science-education.ru/ru/article/view?id=5664 (дата обращения: 02.08.2026).