



Введение
Изучение кинематики опорно-двигательного аппарата имеет длительную историю. Наиболее полно эти вопросы изучаются в области кинезиологии –науки о движении человека. С этой целью использовались различные методики, начиная от простой гониометрии с помощью угломера [1; 2, с. 177], до современных программно-аппаратных комплексов [3; 4, с. 29–49]. Многие подобные вопросы решались с использованием методики киноциклографии [5, с.16, 38, 64, 179; 6, с.155–157; 7, с. 131–141]. Наиболее подробные исследования проводились в области спортивной биомеханики [6, с. 263; 8; 9].
Сложные перемещения тела человека в трехмерном пространстве осуществляются за счет комбинации простых вращательных движений вокруг трех осей, как в сегментах позвоночника, так и в суставах конечностей.
Возникновение движения в одном из суставов нижних конечностей изменяет пространственную ориентацию всего тела человека, что сопровождается перемещением геометрического центра позвоночника, а при выходе его проекции за границы площади опоры приводит к утрате ортостатического положения. Для предотвращения этой ситуации в других суставах совершаются компенсаторные движения, направленные на нормализацию положения проекции геометрического центра позвоночника (ГЦП).
Математическое моделирование как метод исследования с успехом используется для решения проблем кинезиологии [7, с. 131–141]. В большинстве случаев математические модели движений в суставах представлены в виде общих положений описания расчетов кинематических цепей и не позволяют оценить роль каждого сустава и ответных компенсаторных механизмов, оказывающих влияние на изменение формы и ориентации тела человека. Ранее проведенные авторами статьи исследования продемонстрировали адекватность такого подхода для решения задач формирования деформаций опорно-двигательного аппарата [10].
Изучение биомеханики опорно-двигательного аппарата в современных условиях продолжается с применением новых методов и оборудования: стабилометрия [11], постурография [12], исследования с использованием 3D-моделей [13], а также видеоанализ, экспериментальные исследования на кадаверном материале и др. Выбор методики исследований определяется его целью и задачами. Разнообразие методов и подходов свидетельствует о том, что в настоящее время отсутствуют универсальные общедоступные подходы к изучению биомеханики движений. Наиболее сложным является понимание биомеханики движений в позвоночнике. Результаты изучения физиологических процессов движений могут быть использованы для понимания механогенеза формирования деформаций скелета человека и разработки оптимального алгоритма их устранения.
Цель исследования – определение степени участия сегментов позвоночника и суставов нижних конечностей в изменении положения тела человека при реализации физиологических движений в них.
Материалы и методы исследования
Для достижения поставленной цели была использована разработанная авторами статьи трехмерная кинематическая параметрическая модель позвоночника и нижних конечностей [14; 15, с. 20–86; 16, с. 25–55]. Разработанная модель представляет собой кинематическую цепь, данные для которой были получены авторами путем определения на рентгенограммах координат реперных точек тел позвонков и сегментов нижних конечностей. Разработанный математический аппарат реализован авторами в виде программного обеспечения, написанного на языке программирования Delphi для операционной системы Windows.
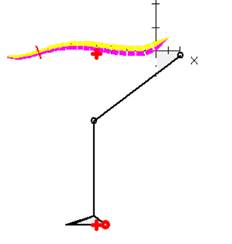
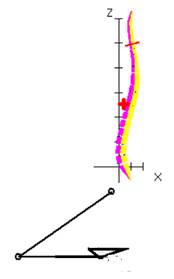
Данная программа является рабочим инструментом для моделирования различных изменений со стороны опорно-двигательного аппарата. Она позволяет, путем внесения линейных и угловых параметров, рассчитывать вновь создаваемые угловые и линейные величины, характеризующие форму и пространственную ориентацию позвоночника и нижних конечностей. Полученные данные представляются в виде таблиц и графического изображения (рис. 1, 2).
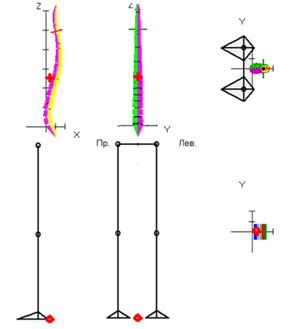
Рис. 1. Базовая кинематическая модель (составлен авторами)
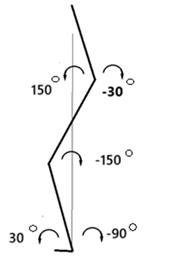
Рис. 2. Амплитуда движений в суставах нижней конечности по и против часовой стрелки (составлен авторами)
Исследование проведено авторамина кафедре систем сбора и обработки данных Новосибирского государственного технического университета в период с 11.01 по 01.03.2025г. Авторы исходят из того, что поддержание привычной пространственной ориентации тела человека в сагиттальной плоскости обеспечивается за счет одновременного решения нескольких задач:
1. Сохранение проекции общего геометрического центра модели позвоночника (ГЦП) в границах площади опоры.
2. Сохранение привычной ориентации оси туловища.
3. Сохранение положения линии взора.
Для сохранения идентичных условий эксперимента в разработанной модели при проведении экспериментов анатомическая длина голени составила 400 мм, анатомическая длина бедра – 450 мм, а расстояние от тазобедренного сустава до точки ГЦП – 350 мм. Положение точки ГЦП локализовалось на середине оси позвоночника, проходящей через кранио-вентральную точку замыкательной пластинки Th1 и аналогичную точку S1 позвонков. Величины задаваемых углов первичных и компенсаторных движений в сегментах позвоночника и в суставах нижних конечностей в сагиттальной плоскости соответствовали их физиологической амплитуде (табл. 1).
Таблица 1
Амплитуда движений в сочленениях опорно-двигательного аппарата
|
Сочленение |
Сгибание |
Разгибание |
|
Th1 – Th2 |
2,5° |
2,5° |
|
Th2 – Th3 |
2,5° |
2,5° |
|
Th3 – Th4 |
2,5° |
2,5° |
|
Th4 – Th5 |
2,5° |
2,5° |
|
Th5 – Th6 |
2,5° |
2,5° |
|
Th6 – Th7 |
4,0° |
4,0° |
|
Th7 – Th8 |
4,0° |
4,0° |
|
Th8 – Th9 |
4,0° |
4,0° |
|
Th9 – Th10 |
6,0° |
6,0° |
|
Th10 – Th11 |
8,0° |
8,0° |
|
Th11 – Th12 |
8,0° |
8.0° |
|
Th12 – L1 |
8.0° |
8,0° |
|
LI – L2 |
10,0° |
10,0° |
|
L2 – L3 |
10,0° |
10,0° |
|
L3 – L4 |
12,0° |
12,0° |
|
L4 – L5 |
12,0° |
12,0° |
|
L5 – S1 |
12,0° |
12,0° |
|
Тазобедренный сустав |
150,0° |
30,0° |
|
Коленный сустав |
145,0° |
0,0° |
|
Голеностопный сустав |
90,0° |
30,0° |
Источник: составлено авторами.
При моделировании компенсаторных реакций сочленение, в котором совершалось первичное движение, в их реализации не принимало участия.
Проведены серии экспериментов, в которых задавалась амплитуда изолированного движения в сагиттальной плоскости в суставах нижних конечностей и сегментах позвоночника, и оценивалась эффективность. Критериями эффективности компенсаторных реакций со стороны каждого сочленения являлись нормализация положения проекции ГЦП и ориентация оси позвоночника.
Результаты исследования и их обсуждение
Проведена оценка влияния изолированного движения в каждом сегменте позвоночника и суставах нижних конечностей на изменение положения оси позвоночника и проекции ГЦП. Часть полученных данных представлена в табл. 2 и на рис. 3–4.
Таблица 2
Отклонение оси позвоночника и положения ГЦП при изолированном движении в сегментах позвоночника и суставах нижних конечностей
|
Сочленение |
Отклонение общей оси позвоночника (в градусах) |
Смещение положения проекции ГЦП (мм) |
||
|
При 1° |
При 10° |
При 1° |
При 10° |
|
|
Th1 – Th2 |
0,0 |
0,4 |
0,2 |
1,5 |
|
Th2 – Th3 |
0,0 |
0,8 |
0,3 |
3,4 |
|
Th3 – Th4 |
0,1 |
1,3 |
0,6 |
5 |
|
Th4 – Th5 |
0,1 |
1,8 |
0,8 |
7,6 |
|
Th5 – Th6 |
0,2 |
2,3 |
1 |
9,8 |
|
Th6 – Th7 |
0,3 |
2,9 |
1,2 |
12 |
|
Th7 – Th8 |
0,3 |
3,4 |
1,4 |
14,2 |
|
Th8 – Th9 |
0,4 |
4,0 |
1,7 |
16,5 |
|
Th9 – Th10 |
0,4 |
4,6 |
1,9 |
18,9 |
|
Th10 – Th11 |
0,5 |
5,2 |
2,2 |
21,4 |
|
Th11 – Th12 |
0,5 |
5,8 |
2,4 |
24 |
|
Th12 – L1 |
0,6 |
6,4 |
2,7 |
26,8 |
|
L1 – L2 |
0,7 |
7,1 |
3 |
29,7 |
|
L2 – L3 |
0,7 |
7,8 |
3,3 |
32,6 |
|
L3 – L4 |
0,8 |
8,6 |
3,6 |
35,9 |
|
L4 – L5 |
0,9 |
9,4 |
3,9 |
39,2 |
|
L5 – S1 |
1,0 |
10,0 |
4,3 |
42,9 |
|
Тазобедренный |
1,0 |
10,0 |
6,2 |
62,2 |
|
Коленный |
1,0 |
10,0 |
14,2 |
104,5 |
|
Голеностопный |
1,0 |
10,0 |
21,2 |
211,5 |
Источник: составлено авторами.
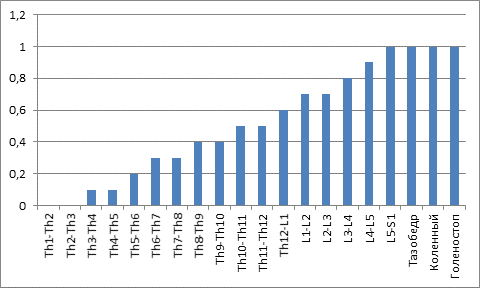
Рис. 3. Отклонение оси позвоночника при изолированном движении в сегментах позвоночника и суставах нижних конечностей на 1°.
Источник: составлено авторами
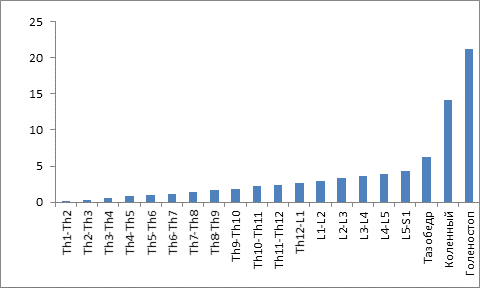
Рис. 4. Смещение положения ГЦП при изолированном движении в сегментах позвоночника и суставах нижних конечностей на 1°.
Источник: составлено авторами
Анализ этих данных позволяет утверждать, что, независимо от локализации сустава, в котором осуществляется движение, отклонение оси позвоночника от исходного значения, равно углу совершаемого движения в этом суставе. При одновременном совершении движений во всех суставах нижних конечностей, отклонение оси позвоночника от исходного значения равно сумме угловых перемещений в каждом суставе. Таким образом, можно говорить о прямо пропорциональной зависимости этих параметров. В отличие от этого, перемещение проекции ГЦП в первую очередь зависит от локализации сустава, в котором совершается движение. При одновременном совершении движений в суставах нижних конечностей смещения ГЦП за счет каждого сустава также суммируются.
При моделировании углового смещения в сегментах позвоночника изменение ориентации оси позвоночника и дислокация проекции ГЦП прогрессивно увеличивается по мере снижения уровня локализации сегмента. Перемещение проекции ГЦП при осуществлении движений в суставах нижней конечности более значительно и зависит от их локализации. Движения в сегментах позвоночника оказывают минимальное влияние на изменение положения проекции ГЦП. Решение этой задачи возложено на суставы нижних конечностей, и наибольший вклад вносят голеностопные суставы.
Таким образом, можно заключить, что эффективность нормализации положения оси туловища нарастает по мере снижения уровня локализации сегмента позвоночника и достигает максимума за счет суставов нижней конечности, независимо от их локализации.
Наклон туловища вперед за счет голеностопных суставов
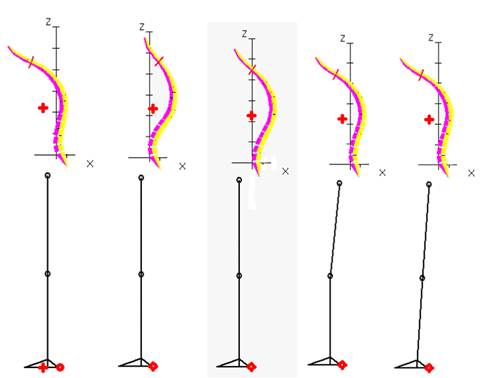
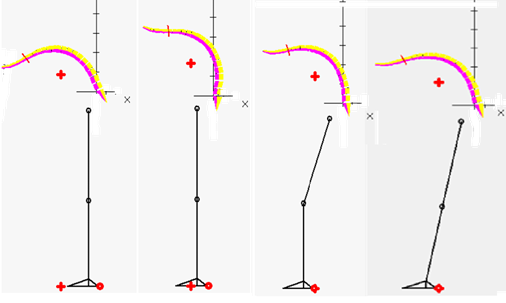
Как показали эксперименты, наклон туловища вперед за счет разгибания (движение стопы в тыльном направлении, против часовой стрелки) при сохранении положения проекции ГЦП возможно в пределах только 8° (рис. 5–1).

1 2 3 4
Рис. 5. Варианты компенсаций при разгибании в голеностопных суставах на 8°: 1) разгибание в голеностопных суставах на 8°; 2) компенсация за счет тазобедренных суставов; 3) компенсация за счет коленных суставов; 4) компенсация за счет поясничных сегментов.
Источник: составлено авторами
Превышение этого предела приводит к выходу проекции ГЦП за границы опоры и утрате ортостатического положения тела человека.
Компенсаторная реакция за счет разгибания в тазобедренных или сгибания в коленных суставах на 8° приводит к частичной нормализации положения проекции ГЦП, но при этом положение общей оси туловища полностью нормализуется (рис. 5–2 и 5–3).
Компенсация за счет усиления поясничного лордоза (по 1,6° в каждом сегменте) полностью нормализует положение оси туловища, но недостаточно для полной нормализации проекции ГЦП. При этом величина центрального угла поясничной дуги увеличивается с 59 до 67° и не превышает физиологических вариантов нормы (рис. 5–4).
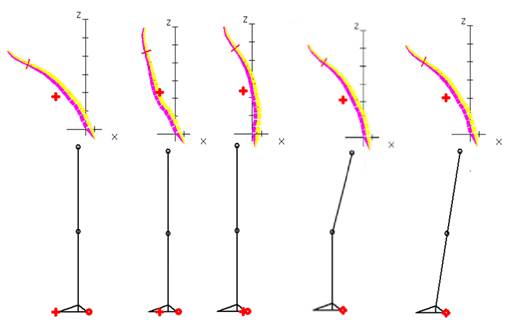
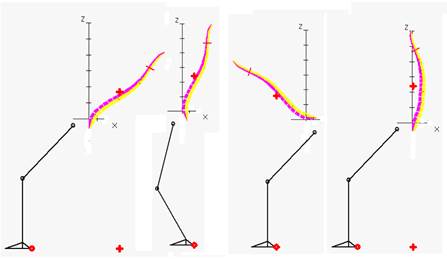
При дальнейшем увеличении угла разгибания стоп до физиологического максимума (30°) проекция ГЦП выходит за пределы передней границы площади опоры, что требует увеличения параметров компенсаторных реакций (рис. 6–1).
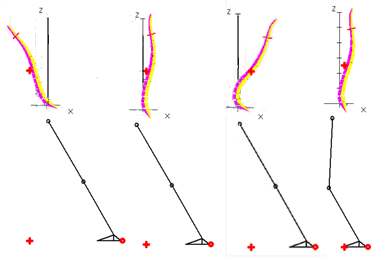
1 2 3 4
Рис. 6. Варианты компенсации при разгибании в голеностопных суставах на 30°: 1) разгибание в голеностопных суставах на 30°; 2) компенсация за счет тазобедренных суставов; 3) компенсация за счет поясничных сегментов; 4) компенсация за счет коленных суставов.
Источник: составлено авторами
В этой ситуации восстановить положение проекции ГЦП в границах площади опоры за счет полного исчерпания физиологических возможностей разгибания в тазобедренных суставах не удается (рис. 6–2).
Изолированное максимальное физиологическое разгибание в поясничных сегментах позвоночника также не позволяет сохранить ортостатическое положение тела человека (рис. 6–3). В этой ситуации механизм компенсации за счет изолированного сгибания в коленных суставах на 33° позволяет переместить проекцию ГЦП к вентральной границе площади опоры. При этом отклонение общей оси туловища от вертикали составляет -7,7° (рис. 6–4).
Наклон туловища вперед за счет тазобедренных суставов
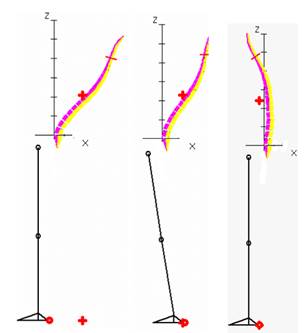
Иные результаты были получены при моделировании функциональных возможностей сгибания в тазобедренных суставах. При сгибании в тазобедренных суставах на угол 30° проекция ГЦП достигает передней границы площади опоры (рис. 7–1).
Полная нормализация положения проекции ГЦП реализуется за счет разгибания в голеностопных суставах на 9°, но при этом угол отклонения оси туловища от вертикали кпереди не нормализуется и составляет -16,0° (рис. 7–2).
Компенсация за счет сгибания в коленных суставах на 13° создает аналогичную ситуацию. Положение проекции ГЦП нормализуется, а отклонение оси туловища от вертикали кпереди составляет 12,3° (рис. 7–3).
Ответная реакция на исходную ситуацию за счет разгибания в каждом поясничном сегменте на -7° формирует поясничную дугу с величиной центрального угла 102,5°, что превышает параметры нормы в положении «стоя», но позволяет приблизить проекцию ГЦП к нормальному значению и восстановить ориентацию общей оси тела человека (рис. 7–4).
1 2 3 4
Рис. 7. Варианты компенсации при сгибании в тазобедренных суставах на 30°: 1) сгибание в тазобедренных суставах на 30°; 2) компенсация за счет голеностопных суставов; 3) компенсация за счет коленных суставов; 4) компенсация за счет поясничных сегментов.
Источник: составлено авторами
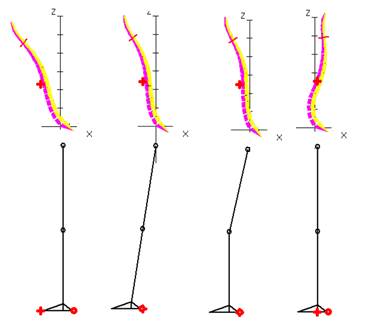
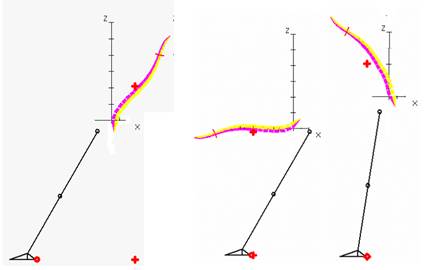
Реализация сгибания в тазобедренных суставах на угол 90° приводит к смещению проекции ГЦП за переднюю границу опоры (рис. 8–1).
Проекция ГЦП может быть нормализована за счет сгибания в голеностопных суставах на 24°, что уменьшает угол наклона оси туловища до 61,3° (рис. 8–2).
Восстановления положения проекции ГЦП можно достичь при сгибании в коленных суставах на 24,0°, а для полной ее нормализации потребуется сгибание в них на 39°, но и это не позволяет нормализовать ориентацию оси туловища, угол наклона которой составляет 46,3° (рис. 8–3).
Попытки использования механизма компенсации за счет максимального физиологического разгибания в поясничных сегментах не дают положительного эффекта для нормализации ни одного из анализируемых параметров (рис. 8–4).
При максимальном сгибании в тазобедренных суставах на угол 150,0° (рис. 9–1) сгибание в голеностопных суставах на 11° позволяет сместить проекцию ГЦП к передней границе площади опоры, а для полной нормализации ее положения требуется сгибание в голеностопных суставах на 27°. Угол отклонения оси туловища при этом составляет -118° (рис. 9–2).
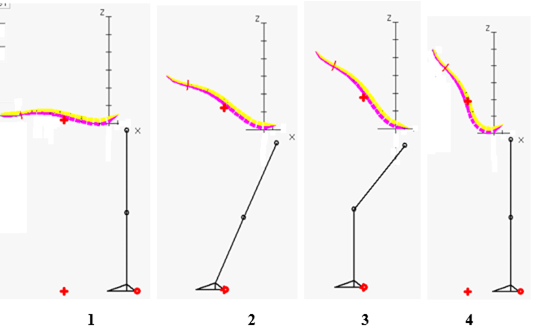
Рис. 8. Варианты компенсации при сгибании в тазобедренных суставах на 90°: 1) сгибания в тазобедренных суставах на 90°; 2) компенсация за счет голеностопных суставов; 3) компенсация за счет коленных суставов; 4) компенсация за счет поясничных сегментов. Источник: составлено авторами
Восстановление положения проекции ГЦП на передней границе площади опоры возможно за счет сгибания в коленных суставах на 29°, а при сгибании на 60° полностью его нормализовать, но при этом ось туловища занимает положение близкое к горизонтальному 85° (рис. 9–3).
Иной эффект достигается при попытке компенсации за счет максимального физиологического усиления поясничного лордоза. В этом случае проекция ГЦП еще больше удаляется от своего исходного положения в вентральном направлении (рис. 9–4).
Во всех случаях двух последних серий экспериментов (сгибание в тазобедренных суставах на 90 и 150°) ни один из механизмов компенсации, даже их сочетание, не позволяет нормализовать ориентацию общей оси туловища человека.
Одновременное использование всех вариантов компенсаторных механизмов может быть описано при анализе перехода из положения «стоя» в положение «сидя» и «глубокого приседания». Для анализа этого механизма авторами статьи дополнительно разработана кинематическая модель.
Основной целью смены положения тела является плавное перемещение тела по вертикали при сохранении проекции ГЦП в границах площади опоры.
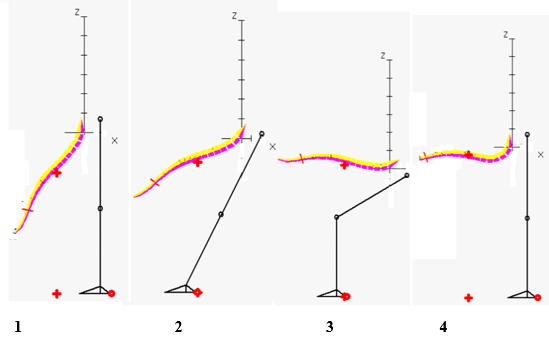
Рис. 9. Варианты компенсации при сгибании в тазобедренных суставах на 150°: 1) сгибания в тазобедренных суставах на 150°; 2) компенсация за счет сгибания в голеностопных суставах на 27°; 3) компенсация за счет коленных суставов; 4) компенсация за счет поясничных сегментов. Источник: составлено авторами
Этот физиологический процесс может быть представлен в виде двух механизмов. Начальным движением является разгибание в голеностопных суставах на 8°, что смещает проекцию ГЦП к вентральной границе площади опоры и может не требовать компенсаторных реакций. Движения в коленных и тазобедренных суставах можно рассматривать как компенсаторные реакции, направленные на сохранение положения проекции ГЦП в границах площади опоры. Содружественное движение в этих трех суставах обеспечивает опускание туловища по вертикали без изменения положения общей оси туловища.
Второй этап этого процесса начинается после исчерпания физиологической амплитуды разгибания в голеностопных суставах (30°) и осуществляется за счет коленных и тазобедренных суставов. Сгибание в коленном суставе выводит проекцию ГЦП за заднюю границу площади опоры, а сгибание в тазобедренном суставе восстанавливает ее положение, но приводит к увеличению угла наклона туловища. Согласование этих двух движений обеспечивает плавное опускание туловища, вплоть до возникновения контакта таза (седалищных бугров) с поверхностью сиденья.
Для реализации первого этапа задается угол разгибания в голеностопном суставе и рассчитываются оптимальные компенсаторные углы в коленном и тазобедренном суставах при условии сохранения положения проекции ГЦП. Для реализации второго этапа задается величина приращения угла сгибания в коленном суставе и рассчитывается угол сгибания в тазобедренном суставе с той же целью – сохранение положения проекции ГЦП. Расчетные схемы представлены на рис. 10–12.
|
Рис. 10. Расчетная схема исходного положения «стоя». Источник: составлено авторами
|
Рис. 11. Расчетная схема первого этапа приседания. Положение звеньев кинематической цепи после поворота отрезка AB на Ða. Источник: составлено авторами |
Рис. 12. Расчетная схема второго этапа приседания. Положение звеньев кинематической цепи после поворота отрезка B1C1 на угол Db. Источник: составлено авторами |

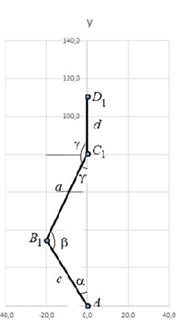

Описание расчетов
Дано:
Длина стороны АВ = c – анатомическая длина голени;
длина стороны BC = a – анатомическая длина бедра;
длина стороны CD = d – расстояние от тазобедренного сустава до точки общего геометрического центра модели позвоночника (ГЦП).
Величина задаваемого угла A (ÐCAB = a) – угол отклонения оси голени от вертикали.
Требуется найти:
УголÐС (ÐACB = g¢или ÐBCD = g = 180° – g¢), угол ÐB (ÐABC = b).
Длину стороны AC.
В исходном положении a = 0, g¢= 0, b = 180°, AC= b = AB + BC = a + c.
Координаты указанных точек: A (0; 0), B (0; c), C (0; a + c), D (0; a + c + d) (рис. 10).
Первый этап перехода в положение «сидя»
Задается поворот отрезка AB против часовой стрелки на Ða
Точки после поворота занимают положение B1, C1, D1 (рис. 11).
Согласно теореме синусов  .
.
Если изменяется Ða, тогда , а b = 180° – a – g¢.
, а b = 180° – a – g¢.
Сторона  .
.
Координаты точек: ,
,  ,
,  ,
, .
.
Второй этап перехода в положение «сидя»
Дано:
Точка B1 является точкой поворота B1С1 по часовой стрелке
ÐAC1B1 =g¢ = arcsin(c×sina/a), ÐDC1B1=g = 180° – g¢.
Задается угол поворота отрезка B1С1на угол Db.
Точки после поворота занимают положение, C2, D2 (рис. 12).
Требуется найти:
ÐD2C2B1 = g,ÐАB1С2 = b; длину отрезка DD1.
Имея вычисленные координаты точек:
, ,
, ,
, , определяются углы между отрезками и расстояния между точками.
, определяются углы между отрезками и расстояния между точками.
Угол между B1С2 и Ox, .
.
Проведенные эксперименты позволили выявить ряд закономерностей.
Так, на первом этапе амплитуда компенсаторной реакции со стороны коленного сустава по абсолютному значению всегда превышает амплитуду сгибания в тазобедренном суставе. Эта разница соответствует амплитуде разгибания в голеностопном суставе (табл. 3 и рис. 13).
Окончание процесса смены положения тела характеризуется достижением разгибания в голеностопном суставе на 30,0°, сгибания в коленном суставе на -120° (до угла 60°) и сгибания в тазобедренном суставе на 135° (до угла 45°). При этом ось туловища отклоняется от вертикали на 45° (рис. 14).
В положении «сидя» изменяются границы опорной поверхности, что позволяет устранить избыточный наклон туловища за счет разгибания в тазобедренных суставах до принятия удобной, комфортной позы, характеризующейся снижением повышенного тонуса мышц туловища и нижних конечностей (рис. 15).
Таблица 3
Изменение углов в суставах нижних конечностей при переходе в положение «сидя»
|
№ этапа |
Амплитуда движения в суставе |
||
|
Голеностопный |
Коленный |
Тазобедренный |
|
|
1 |
1,0° |
-1,9° |
0,9° |
|
5,0° |
-9,5° |
4,5° |
|
|
10,0° |
-18,9° |
8,9° |
|
|
15,0° |
-28,3° |
13,3° |
|
|
20,0° |
-37,7° |
17,7° |
|
|
25,0° |
-47,1° |
22,1° |
|
|
30,0° |
-56,4° |
26,4° |
|
|
2 |
30,0° |
-76,4° |
67,5° |
|
30,0° |
-96,4° |
103,7° |
|
|
30,0° |
-116,4° |
131,8° |
|
|
30,0° |
-136,4° |
147,9° |
|
|
30,0° |
-156,4° |
154,1° |
|
Источник: составлено авторами.
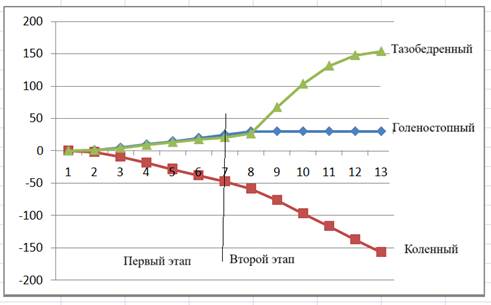
Рис. 13. Изменение углов в суставах нижних конечностей при переходе в положение «сидя». Источник: составлено авторами
Для перехода из положения «сидя» в положении «стоя» требуется обратная последовательность движений в суставах нижних конечностей.
|
Рис. 14. Поза при завершении перехода в положение сидя. Источник: составлено авторами |
Источник: составлено авторами |
Рис. 16. Поза «глубокого приседания». Источник: составлено авторами |

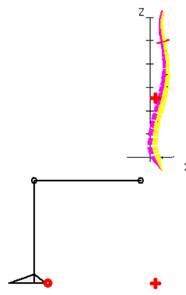 Рис. 15. Нормальная поза сидя.
Рис. 15. Нормальная поза сидя.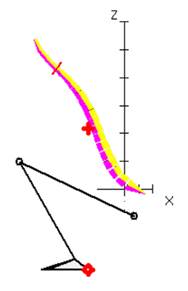
Стремление принять позу «глубокого приседа» осуществляется по тому же алгоритму и требует максимального исчерпания амплитуды сгибания в коленных суставах (на 145° до угла 35°). При этом амплитуда компенсаторного сгибания в тазобедренных суставах достигает 151° (до угла 29°), а ось туловища отклоняется от вертикали на 31° (рис. 16).
Отсутствие компенсаторной реакции со стороны тазобедренных суставов приводит к резкому опусканию туловища по вертикали и удару таза о поверхность сидения. При отсутствии движений в голеностопном суставе попытка перехода в положении «сидя» завершается при сгибании в коленном суставе на -53° (до угла 127°), при этом амплитуда сгибания в тазобедренном суставе достигает своего максимума 150° (до угла 30°), а ось туловища занимает почти горизонтальное положение, образуя с вертикалью угол 92° (рис. 17).
Придавая стопе положение сгибания в голеностопном суставе на 90°, человек может принять позу «на коленях» (рис. 18).
В этой ситуации амплитуда сгибания в коленном суставе достигает своего максимума до образования с осью бедра угла в 35°, а ось позвоночника сохраняет свое вертикальное положение, образуя с осью бедра угол 125°.
|
Рис. 17. Финальная поза при приседании без участия голеностопных суставов. Источник: составлено авторами |
Рис. 18. Поза «на коленях». Источник: составлено авторами
|
Наклон туловища вперед за счет сегментов позвоночника
Осуществление наклона туловища вперед за счет сгибания в сегментах позвоночника, изменяет его форму, которая характеризуется величиной центрального угла сформированной дуги. При этом изменяется ориентация хорды создаваемой дуги, что отражается на ориентации общей оси туловища (от Th1 до L5), что сопровождается перемещением ГЦП и требует включения механизмов компенсации для нормализации его положения.
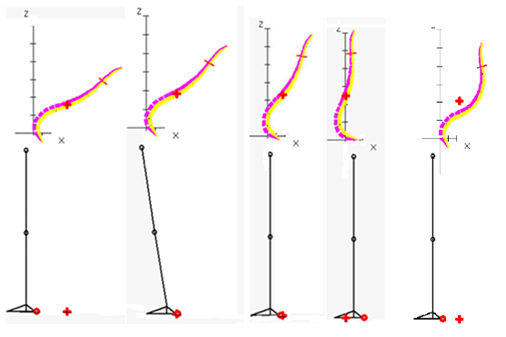
Изолированное сгибание в грудном отделе позвоночника, в пределах функциональных возможностей его сегментов (табл. 1), увеличивает центральный угол грудной дуги с 34° до 80°, а угол наклона общей оси туловища от вертикали достигает 17°. При этом проекция ГЦП не достигает передней границы площади опоры и тем самым не создается предпосылок для утраты ортостатического положения тела человека (рис. 19–1).
Разгибание в поясничных сегментах (по 4° в каждом) приводит к нормализации положения проекции ГЦП за счет формирования компенсаторной поясничной дуги с величиной центрального угла 90°, что превышает варианты нормы. Угол наклона общей оси туловища изменяется с 17° до -3,8° (рис. 19–2).
Нормализация проекции ГЦП за счет суставов нижних конечностей достигается либо за счет разгибания в тазобедренных суставов на 14°, либо за счет сгибания в коленных суставах на 6°, либо за счет сгибания в голеностопных суставах на 4°. При этом ориентация общей оси туловища уменьшается, но не достигает нормы и составляет -2,6; -11,6 и -13,6° соответственно (рис. 19–3 и 19–4).
Сгибание в поясничных сегментах в физиологических рамках до устранения поясничного лордоза приводит к наклону общей оси туловища под углом 19° к вертикали. Это сохраняет положение проекции ГЦП в границах площади опоры (рис. 19–5).
1 2 3 4 5
Рис. 19. Варианты компенсации при изолированном физиологическом сгибании в грудных сегментах: 1) физиологическое сгибание в грудных сегментах; 2) компенсация за счет поясничных сегментов; 3) компенсация за счет тазобедренных суставов; 4) компенсация за счет коленных суставов; 5) компенсация за счет голеностопных суставов.
Источник: составлено авторами
Анализ полученных результатов позволяет считать, что при усилении грудного кифоза компенсаторная реакция со стороны голеностопных суставов, при свой минимальности, наиболее эффективна только для нормализации положения проекции ГЦП. В отличие от этого усиление поясничного лордоза нормализует как положения проекции ГЦП, так и ориентацию общей оси туловища.
Изолированное максимальное физиологическое сгибание во всех поясничных сегментах приводит к формированию флексионной поясничной дуги с величиной центрального угла 22° и наклону общей оси туловища вперед на -44°. При этом проекция ГЦП достигает передней границы площади опоры (рис. 20–1).
Компенсаторное разгибание в пределах физиологических возможностей грудных сегментов не нормализует указанные параметры. Величина образуемого лордоза на протяжении грудного отдела позвоночника составляет 18°, а наклон оси туловища -21,5° (рис. 20–2).
Для нормализации положения проекции ГЦП требуется изолированное максимальное разгибание в тазобедренных суставах на 30°, либо сгибание в коленных суставах на 14°, либо сгибание в голеностопных суставах на 9°. При этом положение общей оси туловища составляет -14, -30 и -35° соответственно (рис. 20–3 и 20–4). Таким образом, компенсация за счет тазобедренных суставов является наиболее приемлемым вариантом.
1 2 3 4 5
Рис. 20. Варианты компенсации при изолированном физиологическом сгибании в поясничных сегментах: 1) физиологическое сгибание в поясничных сегментах; 2) компенсация за счет грудных сегментов; 3) компенсация за счет тазобедренных суставов; 4) компенсация за счет коленных суставов; 5) компенсация за счет голеностопных суставов.
Источник: составлено авторами
При максимальном совместном физиологическом сгибании грудного и поясничного отделов позвоночника проекция ГЦП локализуется вне площади опоры, а наклон общей оси туловища составляет -68° (рис. 21–1).
Реализация максимальной физиологической амплитуды компенсаторного разгибания в тазобедренных суставах на 30° перемещает проекцию ГЦП в границы площади опоры, но не позволяет полностью нормализовать ее положение. При этом наклон оси туловища уменьшается и составляет -37,8° (рис. 21–2).
Для компенсации положения ГЦП за счет коленных суставов необходимо сгибание в них на 18,0° или сгибание в голеностопных суставах на 11°. При этом нормализация положения оси туловища не достигается и составляет -49,8 и -56,8° соответственно (рис. 21–3 и 21–4).
Совместная реализация физиологических возможностей сгибания во всех сегментах поясничного и грудного отделов позвоночника, а также сгибания в тазобедренных суставах на 130° позволяет смоделировать позу «наклон вперед», представленную на рис. 21. При этом компенсаторное сгибание в голеностопных суставах составляет 8°, а в коленных – 5°.
1 2 3 4
Рис. 21. Варианты компенсации при совместном физиологическом сгибании в сегментах грудного и поясничного отделов позвоночника: 1) физиологическое сгибание в грудных и поясничных сегментах; 2) компенсация за счет тазобедренных суставов; 3) компенсация за счет коленных суставов; 4) компенсация за счет голеностопных суставов.
Источник: составлено авторами

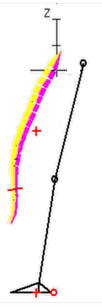
Рис. 22. Поза при сгибании в сегментах позвоночника и тазобедренных суставов.
Источник: составлено авторами
Данное положение можно легко проверить, попытавшись совершить полноценный наклон туловища вперед при исходном плотном контакте спины и пяток со стеной.
Для воссоздания позы, представленной на рис. 22, требуется добавить максимальное сгибание в грудном и шейном отделах позвоночника и увеличить амплитуду сгибания в тазобедренных суставах до 145°.
Отклонение тела человека в дорзальном направлении реализуется за счет сгибания в голеностопных и коленных суставах, разгибания в тазобедренных суставах и сегментов позвоночника. Локализация проекции геометрического центра позвоночника (ГЦП) у дорзальной границы площади опоры приводит к тому, что даже при минимальных амплитудах указанных движений, в пределах 1–2°, проекция ГЦП выходит за пределы площади опоры и вызывает включение компенсаторных реакций в виде сгибания в тазобедренных суставах и сегментах позвоночника или разгибания в голеностопных суставах.

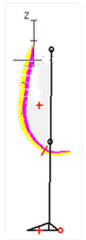
Рис. 23. Поза при парадоксальном сгибании в сегментах позвоночника и тазобедренных суставах. Отклонение туловища назад за счет голеностопных суставов.
Источник: составлено авторами
Изолированное сгибание в голеностопных суставах имеет весьма значительную амплитуду (90°), а компенсирующая амплитуда сгибания в тазобедренных суставах превосходит эти значения (150°). Как показали эксперименты, компенсируемая амплитуда сгибания в голеностопных суставах не превышает 30°, что требует компенсаторного сгибания в тазобедренных суставах на 130°. При этом угол наклона оси туловища к вертикали составляет 95° (рис. 24–2). Продолжение этого процесса приводит к перемещению ГЦП в дорзальном направлении за счет увеличения угла сгибания в тазобедренных суставах.
Компенсаторные возможности сегментов поясничного отдела позвоночника менее значительны и способны компенсировать только 9° сгибания в голеностопных суставах. Наклон оси туловища при этом составляет 35° (рис. 24–3).
1 2 3
Рис. 24. Варианты компенсации при сгибании в голеностопных суставах: 1) физиологическое сгибание в голеностопных суставах; 2) компенсация за счет 2) сгибания в тазобедренных суставах; 3) компенсация за счет сгибания поясничных сегментов.
Источник: составлено авторами
Отклонение туловища назад за счет коленных суставов
Амплитуда изолированного сгибания в коленных суставах весьма значительна, но может быть компенсирована только частично, в пределах до 44°, что определяется компенсаторной физиологической амплитудой разгибания в голеностопных суставах (30°) (рис. 25–2).
1 2 3 4
Рис. 25. Варианты компенсации при сгибании в коленных суставах: 1) физиологическое сгибание в коленных суставах; 2) компенсация за счет разгибания в голеностопных суставах; 3) компенсация за счет сгибания в тазобедренных суставах; 4) компенсация за счет сгибания в поясничных сегментах.
Источник: составлено авторами
Нормализация проекции ГЦП при данной величине сгибания в коленном суставе может быть компенсирована сгибанием в тазобедренных суставах на 100°, что приводит к наклону оси туловища вперед под углом 51,3° (рис. 25–3).
При данном угле сгибания в коленных суставах компенсаторные возможности сгибания в поясничных сегментах не позволяют сместить проекцию ГЦП в границы опоры, но переводят ось туловища в вертикальное положение (рис. 25–4). Сохранить ортостатическое положение тела человека за счет поясничного отдела позвоночника возможно только при сгибании в коленных суставах на 14°.
Отклонение туловища назад за счет тазобедренных суставов
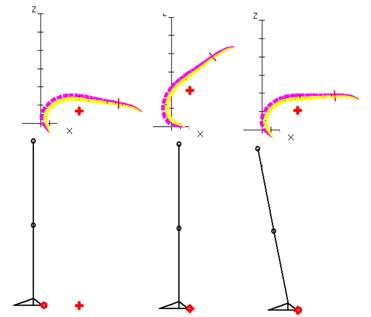
Максимальное физиологическое разгибание в тазобедренных суставах величиной 30° (рис. 26–1) компенсируется разгибанием в голеностопных суставах на 9°, что нормализует положение проекции ГЦП, и уменьшает отклонение оси туловища в дорзальном направлении до угла 25,7° (рис. 26–2).
1 2 3
Рис. 26. Варианты компенсации при разгибании в тазобедренных суставах: 1) физиологическое разгибание в тазобедренных суставах; 2) компенсация за счет разгибания в голеностопных суставах; 3) компенсация за счет сгибания поясничного отдела позвоночника.
Источник: составлено авторами
Компенсаторная флексия поясничного отдела позвоночника (по 9° в каждом сегменте) позволяет нормализовать положение ГЦП, но при этом общая ось туловища наклоняется вперед от вертикали на 8,3° (рис. 26–3).
Отклонение туловища назад за счет сегментов позвоночника приводит к образованию лордоза с величиной центрального угла дуги 18° и отклонению общей оси туловища от вертикали на -27,3° (рис. 27–1). При этом проекция ГЦП выходит за пределы площади опоры, но легко нормализуется разгибанием в голеностопных суставах на 4°, или сгибанием в тазобедренных суставах на 14°, или за счет сгибания по 5,2° в каждом поясничном сегменте. Отклонение оси позвоночника соответственно -23,3; -13,3 и -4,7° (рис. 27–2, 27–3, 27–4).
Увеличение компенсаторной амплитуды в тазобедренных или голеностопных суставах нормализует ориентацию оси позвоночника при сохранении положения проекции ГЦМ в границах площади опоры.
Максимальное физиологическое разгибание в сегментах поясничного отдела позвоночника отклоняет общую ось туловища на угол 54° и значительно смещает проекцию ГЦП в дорзальном направлении (рис. 28–1).

1 2 3 4
Рис. 27. Варианты компенсации при разгибании в грудных сегментах: 1) физиологическое разгибание в грудных сегментах; 2) компенсация за счет сгибания в тазобедренных суставах; 3) компенсация за счет разгибания в голеностопных суставах; 4) компенсация за счет сгибания в поясничных сегментах
Источник: составлено авторами
Для ее нормализации положения проекции ГЦП требуется разгибание в голеностопных суставах на 9°, при этом угол наклона оси туловища уменьшается до 45° (рис. 28–2). Дальнейшее увеличение угла разгибания в голеностопных суставах до 17° перемещает проекцию ГЦП к передней границе опоры и лишь уменьшает угол наклона оси туловища до 37°.
Компенсаторное сгибание в тазобедренных суставах на 30° нормализует положение проекции ГЦМ и уменьшает угол наклона оси туловища до -24° (рис. 28–3). Дальнейшее увеличение угла сгибания в тазобедренном суставе до 50° перемещает проекцию ГЦП к передней границе опоры и полностью нормализует угол наклона оси туловища (рис. 28–4).
При наличии поясничного гиперлордоза нормализовать положение ГЦП и ориентацию общей оси позвоночника за счет физиологических возможностей сгибания в грудных сегментах не удается (рис. 28–5).
При физиологическом разгибании в сегментах позвоночника на всем его протяжении параметры мало отличаются от параметров, описанных при анализе разгибания в поясничных сегментах (рис. 29).
1 2 3 4 5
Рис. 28. Варианты компенсации при разгибании в сегментах поясничного отдела позвоночника: 1) физиологическое разгибание в поясничных сегментах; 2) компенсация за счет разгибания в голеностопных суставах на 9°; 3) компенсация за счет сгибания в тазобедренных суставах на 30°; 4) компенсация за счет сгибания в тазобедренных суставах на 50°.
Источник: составлено авторами
Попытки достичь внешнего сходства смоделированной позы с наблюдением, представленным на рис. 30, за счет изолированного разгибания в тазобедренных суставах на 90°, не позволили достичь желаемого результата.
Для достижения внешнего сходства потребовалось увеличить физиологические амплитуды разгибания во всех сегментах позвоночника и в тазобедренных суставах в два раза. Компенсаторная реакция за счет разгибания в голеностопных суставах составила 30°.
1 2 3
Рис. 29. Варианты компенсации при разгибании во всех сегментах позвоночника: 1) физиологическое разгибание во всех сегментах позвоночника; 3) компенсация за счет сгибания в тазобедренных суставах; 3) компенсация за счет разгибания в голеностопных суставах.
Источник: составлено авторами


Рис. 30. Парадоксальная поза разгибания туловища.
Источник: составлено авторами
Выводы
1. Разработанная математическая кинематическая модель опорно-двигательного аппарата позволяет определить оптимальное сочетание амплитуды движения во всех суставах нижних конечностей и сегментах позвоночника для сохранения ортостатического положения тела человека.
2. Первостепенной задачей компенсаторных реакций является восстановление положения проекции ГЦП в границах площади опоры, а нормализация положения оси туловища является второстепенной задачей и может быть реализована только при условии нахождения проекции ГЦП в границах площади опоры.
3. Одновременная и полная нормализация положения ГЦП и общей оси туловища за счет одного механизма компенсации невозможна и может быть достигнута только при участии всех механизмов компенсации.
4. Нормализация ориентации оси позвоночника наиболее эффективно осуществляется за счет сегментов позвоночника, а нормализация положения ГЦП – за счет суставов нижних конечностей. При этом чем ниже расположен сегмент, участвующий в компенсации, тем больший эффект достигается.
5. Физиологические возможности двигательных сегментов позвоночника вносят весьма скромный вклад (30 %) в изменение ориентации туловища человека.
6. Полная нормализация ориентации оси туловища возможна лишь при небольших первичных движениях (в пределах 8,0) при сохранении положения проекции ГЦМ в границах площади опоры.
7. Анализ адекватных функциональных ситуаций с помощью математической модели позволяет использовать ее для разработки алгоритма оптимальной компенсации патологических деформаций опорно-двигательного аппарата и тем самым обосновать механогенез их формирования и прогрессирования.
Конфликт интересов
Библиографическая ссылка
Гусев А.Ф., Комиссаров В.В., Комиссарова Н.В., Гладков А.В. АНАЛИЗ ФИЗИОЛОГИЧЕСКИХ И КОМПЕНСАТОРНЫХ РЕАКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА В САГИТТАЛЬНОЙ ПЛОСКОСТИ // Современные проблемы науки и образования. 2025. № 4. ;URL: https://science-education.ru/ru/article/view?id=34197 (дата обращения: 24.07.2026).
DOI: https://doi.org/10.17513/spno.34197