



Введение. В последнее время в самые различные отрасли и специальности медицины внедряются технологии объективного контроля, визуализации получаемых функциональных результатов [1]. С одной стороны, такой подход значительно снижает процент ошибки, эффекты «человеческого участия» (эффект Ависа и Готторна), с другой – позволяет осуществить истинно мультидисциплинарный подход и возможность на единых критериях эффективности проводить как лечебные, так и реабилитационные мероприятия различными специалистами. Использование новых технологий во многом усовершенствовало подбор ортопедических изделий, технических средств реабилитации, в том числе в динамике тренирующих программ. Новые вызовы и новые реалии времени значимо повысили требования и к такой многопрофильной и мультидисциплинарной задаче, как протезирование. Значимым и во многом краеугольным моментом при абилитации инвалидов, нуждающихся в протезировании нижних конечностей, является не просто подбор правильного изделия, не только обучение пациента им пользоваться, но и весь комплекс сопровождения, призванного осуществить всесторонний комплекс реабилитации [2, 3].
С 2021 г. в России рекомендован ГОСТ Р53871-2021«Методы оценки реабилитационной эффективности протезирования нижних конечностей» [4]. Новые вызовы для системы медицинской реабилитации, связанные с проведением специальной военной операции (СВО), актуализировали дальнейшую разработку алгоритма и методики использования данного ГОСТа. Рекомендательный характер был ужесточен принятием нового документа: 08.10.2024 г. был утвержден «Временный стандарт оказания услуг по протезированию лицам с ампутациями конечностей вследствие боевой травмы» [5] (далее – «Временный стандарт…»). Согласно «Временному стандарту…», объективная оценка биомеханических показателей ходьбы должна проводиться путем регистрации на специальном программно-аппаратном комплексе, а протокол оценки эффективности подобранного протеза – фиксировать определенные параметры ходьбы. Рекомендованный во «Временном стандарте…» комплекс содержит в своем составе подометрическую дорожку и динамометрическую платформу с гониометрическими датчиками. Все указанное оборудование требует особых условий для монтажа, достаточно громоздко и маломобильно.
Цель исследования – изучение возможности использования технологии инерциальных сенсоров для оценки ходьбы в части соответствия получаемого автоматического протокола требованиям «Временного стандарта…».
Материал и методы исследования. Изучен состав автоматического протокола, формируемый при исследовании функции ходьбы с использованием системы для оценки функции ходьбы «Стэдис-Степ» ООО «Нейрософт» (г. Иваново) № РЗН 2018/7458 от 11.07.2022 г., код вида медицинского изделия 240770 (для оценки биомеханики движений на протезе). При анализе ходьбы пациенту достаточно пройти в удобном для себя темпе максимум 2 мин (при необходимости можно меньше, с сохранением полученных данных) [6]. Движение возможно по любой поверхности, для корректного отражения паттерна ходьбы минимально необходимая дистанция по прямой составляет 5–6 шагов (дальнейшие повороты пациента автоматически «вырезаются» из анализа). Показатели биомеханики ходьбы подсчитывались автоматически и отображались на экране врача в режиме реального времени, автоматически фиксировались во встраиваемый протокол, формируемый в течение нескольких секунд.
Основные биомеханические показатели ходьбы в автоматическом протоколе: временные параметры цикла шага (ЦШ), время ЦШ в сек.; пространственные − длина цикла шага (ДЦШ в см), скорость ходьбы («V» в км/ч), а также ритмичность (соотношение фаз переноса по больной и здоровой сторонам).
Фазовые периоды цикла шага:
- период опоры (ПО) – часть цикла шага (ЦШ), при котором конечность контактирует с опорой, в составе одиночной и двойной опоры по анализируемой конечности;
- период переноса (ПП) – часть ЦШ, при котором конечность не контактирует с опорой;
- период одиночной опоры (ОО) – часть ЦШ, при которой с опорой контактирует только одна конечность;
- период двойной опоры (ДО) – часть ЦШ, при которой с опорой контактируют обе конечности [6].
Среди пространственных характеристик асимметрию шагов от центральной линии отражает циркумдукция, 1/2 от ширины/базы шага, где за ширину шага принимают расстояние от идентичных точек стопы при ходьбе во фронтальной плоскости [6]. Для оценки кинематических характеристик / угловых перемещений суставов, кроме стандартно рассчитываемых амплитуд сгибания/разгибания по плоскостям (в °), оцениваются гониограммы тазобедренных, коленных суставов (при использовании 7 сенсоров возможен кинематический анализ голеностопных суставов, также синхронизированных с паттерном ходьбы). При оценке гониограмм оцениваются общая амплитуда движений во время ходьбы, амплитуда во время ПО и ПП [6, 7], отдельно по трем плоскостям – сагиттальной (по направлению ходьбы), фронтальной и горизонтальной. При необходимости возможна регистрация синхронизированной с паттерном ходьбы электромиограммы с заинтересованных мышц – по 2 канала с каждого сенсора.
Результаты исследования и их обсуждение. К основным параметрам биомеханики ходьбы согласно «Временному стандарту…» относятся [3]: время (с) и длина (см, м) двойного шага, средняя скорость (м/с) и темп ходьбы (шаг/мин). В мировой практике наряду с понятием «двойной шаг» используется термин «цикл шага», эти понятия по сути идентичны [8].
Временными параметрами являются (в скобках – параметры протокола ходьбы по «Стэдис-Степ»):
• фаза опоры, состоящая из фазы опоры на пятку, фазы опоры на всю стопу и фазы опоры на носок (Период опоры). С точки зрения маркерного «удара пяткой», фаза опоры состоит из двух периодов двойной опоры и одного – одиночной опоры (три интервала при этом: опоры на пятку, опоры на всю стопу и опоры на носок – составляют фазу одиночной опоры). Такая трактовка более точно отражает логику и биомеханику паттерна ходьбы;
• фаза переноса (Период переноса);
• фаза двойной опоры (Первая и вторая двойная опора);
• сдвиг (интервал τ) – время от момента окончания опоры на всю стопу одной ноги до начала опоры другой ноги [5].
В отсутствие опоры на носок получается, что существует промежуток времени «без опоры», то есть прыжок. Но паттерн ходьбы подразумевает, что как минимум одна конечность должна находиться в контакте с опорой. Кроме того, ряд протезов не подразумевает полного переката стопы, и в этом случае показатель «сдвига» всегда будет отрицательным. Поэтому представляется более логичным принять к анализу вместо понятия «Сдвиг» – «Начало второй двойной опоры» (Н2ДО), разделяющее окончание контакта предыдущей стопы / отталкивание носка и удар пяткой следующей конечности. Этот показатель в норме стремится к 50%. Установлено [9, 10, 11], что для больных травматолого-ортопедического профиля более характерны достаточно быстро возникающая компенсация двигательных нарушений и формирование симметричного паттерна ходьбы, то есть данный показатель также достаточно симметричен для левой и правой конечности (либо с небольшой разницей, показатель Δ-дельта стремится к 0). При наличии нарушений со стороны центральной нервной системы либо значительных изменений периферической системы показатель Н2ДО асимметричен и сохраняет эту разницу длительное время [12].
• Коэффициент ритмичности ходьбы, скорость ходьбы, гониограммы движений в суставах / протезах, база шага / циркумдукция отдельно по каждой ноге и другие рекомендованные «Временным стандартом…» показатели в полном объеме представлены в автоматическом протоколе «Стэдис-Степ» и не нуждаются в дополнительных пояснениях и корректировке.
Все параметры, как и регламентировано, вычислены в процентах от цикла шага. Обязательные требуемые параметры ходьбы полностью отражены в протоколе «Стэдис-Степ». Отдельно подсчитываются разница между левой и правой конечностью, норма каждого показателя в абсолютных значениях и отдельно – границы нормы в виде заштрихованной области рядом с графическими отрезками показателей. В обязательном пакете протокола оценки биомеханики ходьбы, согласно «Временному стандарту…», кроме временных и пространственных характеристик шага для левой и правой конечности, должны быть представлены кинематические характеристики [5]. В протоколе «Стэдис-Степ» представлены гониограммы по анализируемым суставам. Например, для получения гониограмм тазобедренных и коленных суставов должны быть задействованы 5 сенсоров – по два на голени (по наружной поверхности на 2 см выше наружной лодыжки) и на середину бедра с наружной поверхности и один – на проекцию L4-L5 на область крестца. Если необходимо оценить еще и голеностопные суставы, то дополнительно устанавливаются еще два сенсора на тыльные поверхности стоп симметрично. Все гониограммы регистрируются по 3 плоскостям, синхронизированы с циклом шага, амплитуды даются в градусах, отдельно по правой и левой конечности, также с границами норм в виде заштрихованной области. Гониограммы отражают, главным образом, работу периартикулярных структур и в ряде случаев позволяют диагностировать доклинические формы травматических повреждений [7]. Фрагменты протокола с выделенными изменениями согласно пояснению в тексте представлены на рисунках 1 и 2.
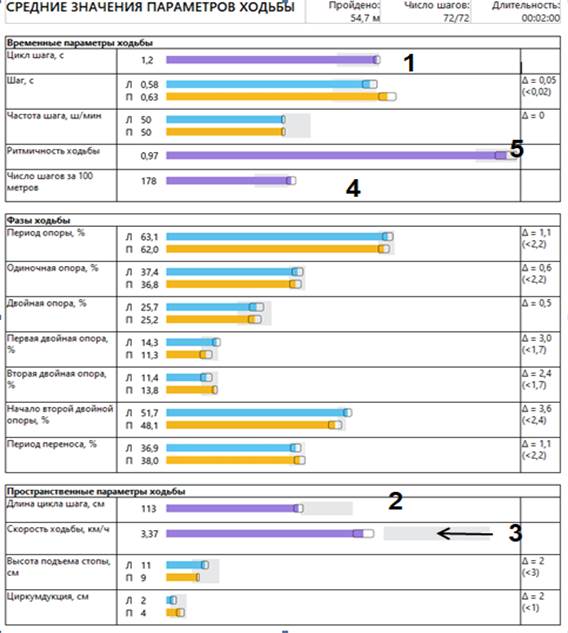
Рис. 1. Соответствие основных биомеханических параметров ходьбы по автоматическому протоколу технологии инерциальных сенсоров: 1 – Время двойного шага = цикл шага, 2 – Длина двойного шага = длина цикла шага, 3 – Средняя скорость ходьбы = скорость ходьбы, 4 – Темп ходьбы = число шагов за 100 м [2], 5 – Ритмичность ходьбы = ритмичность ходьбы (подсчитывается автоматически). Стрелкой указан «коридор» нормы на показателе скорости ходьбы
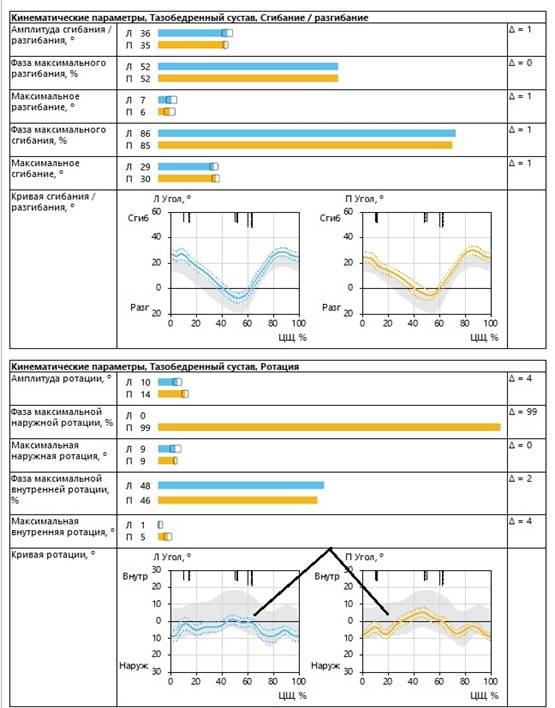
Рис. 2. Кинематические характеристики тазобедренного сустава / фрагмент протокола – сгибание/разгибание и ротация, синхронизированные с циклом шага (стрелками показана граница нормы на гониограммах ротации левого (синяя линия) и правого (желтая) суставов). По оси абсцисс – процент от цикла шага, по оси ординат – угол в градусах; фазы максимального сгибания/разгибания, ротации даны в % от цикла шага и в виде столбиковых диаграмм синего цвета для левой конечности, желтого – для правой
В отсутствие платформ давления в комплексе «Стэдис-Степ» два требуемых показателя динамических характеристик шага согласно «Временному стандарту…» (максимальный уровень давления N меньше 20N/см2 и распределение силы между конечностями (N50/50%)) не реализованы в автоматическом протоколе анализа ходьбы с использованием технологии инерциальных сенсоров. Но биомеханический/объективный паттерн ходьбы содержит целый комплекс адаптивных, компенсаторных и декомпенсаторных изменений [2, 11, 12]. Например, дефицит функциональной состоятельности со стороны коленного сустава достаточно быстро «включает» адаптивный механизм вышележащих уровней – тазобедренного сустава, пояснично-крестцового отдела позвоночника, суставы контралатеральной конечности [7]. Указанные изменения отражены в протоколах и проявлялись в виде асимметрии. Дополнительной опцией используемых сенсоров являлась возможность регистрации синхронизированных с паттерном ходьбы электромиограмм – по 2 отведения на мышцы с каждого сенсора, что значительно расширяло возможности объективного контроля движений. Предложенная технология позволяет практически в режиме реального времени визуализировать эти нарушения и подбирать наиболее оптимальный вариант как для коррекции/протезирования, так и для выбора методов восстановительного лечения.
Заключение. Основываясь на ранее полученных результатах и опыте работы с инерциальными сенсорами, учитывая имеющиеся работы других авторов, предложено использовать для объективной оценки ходьбы при оказании услуг по протезированию лицам с ампутациями конечностей вследствие боевой травмы технологию инерциальных сенсоров. Данная технология неинвазивна, безопасна, чувствительна, мобильна, не требует длительного времени и специальных условий и помещений для выполнения.
Библиографическая ссылка
Королева С.В., Королёв П.В. МЕТОДОЛОГИЯ И ТЕХНОЛОГИЯ ИНЕРЦИАЛЬНЫХ СЕНСОРОВ В ОБЪЕКТИВНОЙ ОЦЕНКЕ ХОДЬБЫ ПРИ КОНТРОЛЕ КАЧЕСТВА И ОЖИДАЕМЫХ РЕЗУЛЬТАТОВ ПРОТЕЗИРОВАНИЯ // Современные проблемы науки и образования. 2025. № 1. ;URL: https://science-education.ru/ru/article/view?id=33916 (дата обращения: 24.06.2026).
DOI: https://doi.org/10.17513/spno.33916