



Остеоартроз (ОА) представляется одним из самых распространенных заболеваний опорно-двигательной системы в мире. В западных странах он является одной из наиболее частых причин боли, ограничения повседневной деятельности и инвалидизации у взрослых [1, 2]. Операция эндопротезирования (ЭП) суставов рассматривается как метод лечения для пациентов в случае неэффективной консервативной терапии, когда сохраняются болевой синдром и симптоматика со стороны суставов [3].
На данный момент существуют несколько хирургических подходов к ЭП крупных суставов, например тотальное ЭП или частичное. Также возможно применение различных техник хирургического вмешательства, например мануальное ЭП, ЭП с использованием компьютерной навигации, ЭП с использованием роботизированных систем (РС). Последняя техника ЭП считается наиболее перспективным направлением.
Основываясь на данных разных авторов, можно сделать вывод о том, что использование РС при тотальном ЭП коленного сустава (ТЭКС) способствует обеспечению увеличения точности механического выравнивания, уменьшению разброса ротации компонентов эндопротеза, снижению риска ятрогенных повреждений мягких тканей во время выполнения костных резекций, снижению возможного местного воспалительного ответа за счет более деликатного отношения к окружающим мягким тканям, снижению выраженности болевого синдрома и, как следствие, потребности в анальгетических препаратах, выраженности послеоперационных отеков, кровопотери, рисков проведения гемотрансфузии, потребности в стационарной физиотерапии, более быстрой активизации пациентов и их способности к самостоятельному поднятию прямой прооперированной нижней конечности, достижению лучшего угла сгибания в коленном суставе, лучшим результатам показателей функций по шкале WOMAC, более высокой удовлетворенности пациентов операцией [2].
При изучении робот-ассистированной методики с использованием РС Stryker MAKO при одномыщелковом ЭП коленного сустава (ОЭКС) также отмечаются более точное позиционирование компонентов эндопротеза, снижение риска ятрогенной травматизации окружающих тканей, более выраженное снижение интенсивности болевого синдрома, улучшение показателей по шкалам КSS и FJS-12, снижение времени пребывания в стационаре, уменьшение потребления анальгетиков в послеоперационном периоде, меньшее количество процедур физиотерапии, необходимых для достижения целей физиотерапевтического лечения, лучшая двухлетняя выживаемость эндопротеза (93% и 100% соответственно[C1]) в сравнении с мануальной методикой [4, 5, 6].
В группе пациентов после тотального ЭП тазобедренного сустава (ТЭТБС) с использованием РС Stryker MAKO описаны снижение частоты мальпозиции компонентов эндопротеза, ранних вывихов, интраоперационной кровопотери, меньшее несоответствие длины конечностей, лучшие показатели по шкалам HarrisHipScores, UCLA и FJS-12 при сравнении с пациентами после мануального тотального ТЭТБС [7]. Стоит отметить, что впервые показатели по «Шкале забытого сустава» (FJS-12) оказались на столько высоки именно при использовании РС Stryker MAKO [8].
Несмотря на значительные преимущества использования РС при ТЭКС, ОЭКС, ТЭТБС, упоминаемые в различных источниках литературы, минусами применения РС остаются высокая стоимость и длительная кривая обучаемости.
В 2018 г. Sodhi и соавт. провели исследование 240 с помощью РС Stryker MAKO. В исследовании участвовали 2 хирурга. У хирурга-1 среднее время операции от первой до последней сократилось с 81 до 70 минут (p=0,001), у хирурга-2 среднее время операции от первой до последней сократилось с 117 до 98 минут (p<0,05). Для обоих хирургов время последних 20 операций было таким же, как и время операций в группе с использованием мануального метода. Эти данные означают, что по истечении нескольких месяцев хирург сможет выполнять ТЭКС с помощью РС без превышения времени операции по сравнению с ТЭКС мануальным методом [9].
В 2018 г. Kayani и коллеги сравнили 60 ОЭКС, выполненных с помощью РС Мако, и 60 ОЭКС, выполненных мануально [10]. Было выявлено, что для освоения ОЭКС с помощью РС хирургу потребовалось выполнить 6 операций. Также было обнаружено повышение точности оперативного вмешательства с первого случая при использовании РС. Во время обучения операционной бригады повышенного риска послеоперационных осложнений не наблюдалось.
В 2014 г. Redmond и соавт. проанализировали период освоения методики робот-ассистированного ТЭТБС с помощью РС MAKO [11]. Оценка производилась с использованием следующих параметров: позиционирование компонентов, время операции и осложнения. Время операции очевидно сокращалось по мере возрастания навыков выполнения операций. Авторы сообщили о снижении риска неправильного позиционирования ацетабулярного компонента по мере накопления опыта работы с системой Mako.
Результаты собственных наблюдений
Цель исследования
Целью исследования являлось изучить кривую обучаемости хирурга ТЭКС, ОЭКС, ТЭТБС с помощью РС Stryker MAKO.
Материалы и методы исследования
В исследовании пациенты были распределены на 2 группы по 40 пациентов для ТЭКС, 2 группы по 15 пациентов для ОЭКС, 2 группы по 20 пациентов для ТЭТБС. В каждой из групп сравнивались время выполнения операции и точность постановки имплантата при использовании мануальной методики (ММ) и методики применения РС Stryker MAKO (РС).
Среди включенных в исследование пациентов преобладали лица женского пола (59 женщин, 21 мужчина для ТЭКС; 17 женщин, 13 мужчин для ОЭКС; 25 женщин, 15 мужчин для ТЭТБС). Средний возраст пациентов, принявших участие в исследовании, составил 59,7±8,9 года (38–79 лет) для ТЭКС, 61,2±8,7 года (50–77 лет) для ОЭКС, 59,8±9,5 года (41–79 лет) для ТЭТБС.
Все оперативные вмешательства выполнял один и тот же хирург. Мы не учитывали кривую обучения персонала хирургической поддержки (медсестер, анестезиологов и т.д.), которая может повлиять на эффективность роботизированного метода и интраоперационную координацию. Однако в каждом случае были задействованы одна и та же группа ассистирующих хирургов, анестезиологов и медсестер и один и тот же представитель отрасли.
Время операции не включало время выполнения спинальной анестезии. Оно измерялось для обеих методик от первого разреза кожи до закрытия раны. Первый разрез для РС подгрупп считался не с момента установки антенн, а с момента выполнения основного кожного доступа.
Статистическая обработка данных исследования проводилась при помощи стандартных методов вариативной статистики. С использованием t-критерия Стьюдента для параметрических данных подсчитывалась достоверность различий между количественными величинами изучаемых показателей. Достоверность различий для несвязанных выборок определяли непараметрическими методами (U-критерий Манна–Уитни). Статистически значимыми считались принятые в исследованиях значения достоверности p<0,05 и p<0,01.
Результаты исследования и их обсуждение
Средний возраст пациентов в группе ТЭКС в подгруппе ММ составил 59,4±8,6 года, для РС – 60,0±9,2 (р˃0,05). Минимальное время при ММ составило 38 мин. Минимальное время РС ТЭКС составило 40 мин, для обучения хирурга понадобилось 8 случаев (рис. 1). Среднее время операций составило для ММ 49,7±6,5 мин, для РС 54,5±7,3 мин (р=0,001). Отмечено снижение длительности операции от первого вмешательства до сорокового. Максимальное время РС вмешательства (62–70 мин) было зафиксировано среди первых 10 операций. Максимальное время ММ операции составило 61 мин. Отклонение в позиции компонентов от предоперационного плана при РС ни разу не превысило 1⁰[C2] (1 мм). При ММ отклонение в среднем составило 2,9±1,2⁰ (р=0,0001).
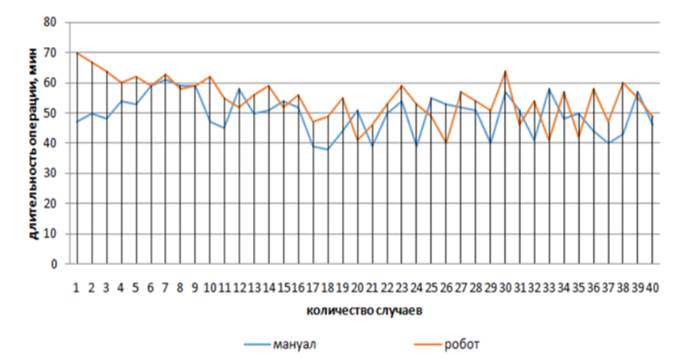
Рис. 1. Кривая обучаемости ТЭКС при мануальном и робот-ассистированном методе
Средний возраст пациентов в группе ОЭКС в подгруппе ММ составил 60,5±7,8 года, для РС – 61,8±9,8 (р˃0,05). Минимальное время при ММ составило 55 мин. Минимальное время РС ОЭКС составило 55 мин, для обучения хирурга понадобилось 7 случаев (рис. 2). Среднее время операций составило для ММ 64,0±6,3 мин, для РС 66,1±10,7 мин (р˃0,05). Отмечено снижение длительности вмешательства от первого к пятнадцатому случаю.
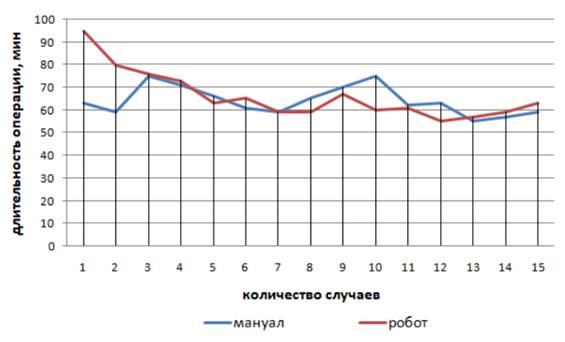
Рис. 2. Кривая обучаемости ОЭКС при мануальном и робот-ассистированном методе
Максимальное время РС операции (73–95 мин) было зафиксировано во время первых четырех процедур. Максимальное время при ММ вмешательстве составило 75 мин. Отклонение в позиции компонентов от предоперационного плана при РС также ни разу не превысило 1⁰ (1 мм). При ММ отклонение в среднем составило 2,5±1,1⁰ (р=0,0001).
Средний возраст пациентов в группе ТЭТБС в подгруппе ММ составил 59,8±9,6 года, в подгруппе РС – 59,9±9,7 года (р˃0,05). Минимальное время при ММ составило 45 мин. Минимальное время РС ТЭТБС составило 47 мин, для обучения хирурга понадобилось 7 случаев (рис. 3). Отмечено постепенное снижение длительности операции от первого случая к двадцатому. Максимальное время вмешательства (62–70 мин) было
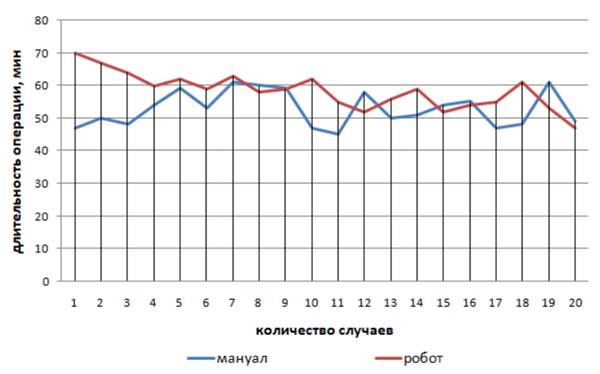
зафиксировано среди первых семи процедур. Максимальное время при ММ операции составило 61 мин. Среднее время операций составило для ММ 52,8±5,3 мин, для РС 58,4±5,6 мин (р=0,001). Отклонение в позиции компонентов от предоперационного плана при РС также ни разу не превысило 1⁰ (1 мм). При ММ отклонение в среднем составило 2,7±1,0⁰ (р=0,0001).
Рис. 3. Кривая обучаемости ТЭТБС при мануальном и робот-ассистированном методе
Выводы
Робот-ассистированное ЭП крупных суставов является актуальным и перспективным направлением в лечении ОА. Однако ввиду технологической сложности процесса хирургу требуется некоторое время для обучения, что в дальнейшем позволяет сократить длительность оперативного вмешательства. В данном случае хирургу понадобилось от 7 до 8 случаев в зависимости от вида оперативного вмешательства. Во всех группах отклонение в позиции компонентов от предоперационного плана при использовании РС ни разу не превысило 1 градуса (1 мм) независимо от количества выполненных случаев.
Библиографическая ссылка
Герасенкова А.Д., Орлецкий А.К., Шумский А.А., Крылов С.В., Гужев С.С. КРИВАЯ ОБУЧАЕМОСТИ РОБОТ-АССИСТИРОВАННОМУ ЭНДОПРОТЕЗИРОВАНИЮ КРУПНЫХ СУСТАВОВ НА ПРИМЕРЕ СИСТЕМЫ STRYKER MAKO // Современные проблемы науки и образования. 2024. № 3. ;URL: https://science-education.ru/ru/article/view?id=33420 (дата обращения: 14.07.2026).
DOI: https://doi.org/10.17513/spno.33420