



ДКМВ линия данных — одна из нескольких «самолет-земля» подсетей, которые могут использоваться, чтобы обеспечить связь через аэронавигационную сеть телекоммуникаций между бортовыми прикладными процессами и соответствующими наземными процессами. Связь в данном диапазоне является экономически выгодным решением (по сравнению со спутниковой связью), а также не требует затрат на установку ретрансляторов. Актуальной задачей является разработка алгоритмов, позволяющих быстро и качественно производить обнаружение передаваемых сигналов и оценку параметров канала с возможностью дальнейшей обработки.
Основной проблемой передачи данных в ДКМВ канале является его нестабильность, что объясняется переменным положением ионосферы, которое зависит от времени суток, географической широты и погодных условий. Кроме того, в ДКМВ каналах присутствуют эффекты многолучевости и замирания сигналов, которые могут быть значительными по длительности. В связи с этим становится проблематичным осуществлять детектирование и захват информационного сигнала. Для решения этой задачи в современных форматах связи [3, 4, 5] предлагается использовать сегмент известных данных (преамбулы), который должен посылаться непосредственно перед информационным сообщением. Однако слабо проработанной задачей является определение информационного сигнала для случаев, когда сегмент преамбулы пропущен приемником.
Согласно требованиям [4] детектирование сигналов [3, 4, 5] с возможностью перехода к приему данных должно производиться за время меньше 2 с, тогда как время передачи информационной части в общем случае не ограничено. Таким образом, возможна ситуация, когда приемная аппаратура переходит к сканированию текущего частотного канала, в котором уже некоторое время передается искомый сигнал, и соответственно сегмент преамбулы оказывается пропущенным. Если в приемнике реализован только алгоритм вхождения по преамбуле, то для таких случаев становится невозможно детектирование, соответственно весь передаваемый пакет данных пропускается.
Однако, исходя из структуры передаваемого сигнала, описанного, в частности, в [3], (рис. 1) предлагается разработать и реализовать детектирующий алгоритм, работающий на основе анализа сегмент известных данных (проб), которые передаются в информационной части.

Рис. 1. Формат пакета MIL-STD-188-110
Длины блоков проб и пересылаемых данных устанавливаются в зависимости от скорости передачи данных так, как это показано в таблице 1.
Таблица 1
Соотношения длин блоков данных и проб
|
Скорость передачи данных, бит/с |
Длина блока данных |
Длина блока пробы |
|
4800 |
32 PSK-8 символа |
16 PSK-8 символов |
|
2400 |
32 PSK-8 символа |
16 PSK-8 символов |
|
1200 |
20 PSK-8 символов |
20 PSK-8 символов |
|
600 |
20 PSK-8 символов |
20 PSK-8 символов |
|
300 |
20 PSK-8 символов |
20 PSK-8 символов |
|
150 |
20 PSK-8 символов |
20 PSK-8 символов |
Пробы в общем случае не несут информации, кроме двух последних проб каждого блока перемежителя. В эти пробы закладывается информация о режиме передачи данных (скорость передачи и длина блока перемежения).
Таким образом, для перехода в прием предлагается произвести детектирование сигнала и выполнить синхронизацию для демодуляции тех сегментов проб, которые позволят определить режим. В этом случае демодуляцию данных можно начинать с сегментов данных нового блока перемежителя. Разработанный алгоритм детектирования сигнала показан на рисунке 2.
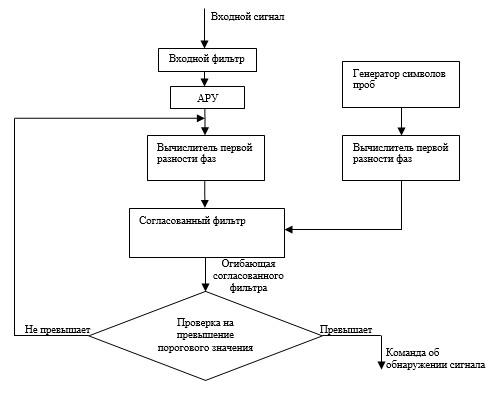
Рис. 2. Блок-схема алгоритма детектирования сигнала
Входной сигнал после фильтрации и нормировки АРУ поступает на вычислитель первой разности фаз. Вычисление производится с учетом входной частоты дискретизации. Выход вычислителя поступает на согласованный с фазоразностными копиями сигналами проб фильтр. Фильтрация производится путем некогерентного накопления проекций сигнала на интервале длительности 200 символов. Когерентное накопление может производиться на интервале не более длительности одной пробы. Выходы согласованного фильтра показаны на рисунках 3а и 3б для случаев однолучевого и двулучевого сигналов соответственно.
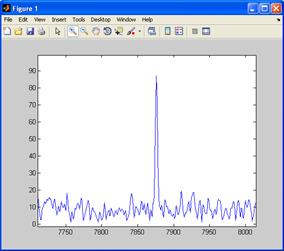
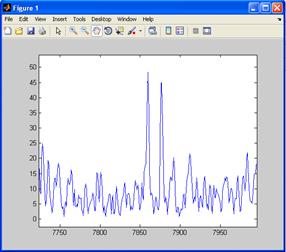
Рис. 3а и 3б – выходы согласованных фильтров
Поскольку фильтрация производится по фазоразностной копии сигнала, то это позволяет устранить влияние расстройки частоты. Это дает возможность не использовать разделение на несколько частотных каналов для частичной компенсации расстройки, что существенно снижает вычислительную сложность.
Решение о наличии сигнала производится путем сравнения пикового значения полученной характеристики с пороговым значением. После принятия решения о наличии сигнала при необходимости по полученной характеристике возможно произвести символьную синхронизацию и получить импульсную характеристику для демодуляции последующей пробы. Если при демодуляции окажется, что проба не содержит информации о режиме передачи, то по полученной синхронизации не составляет сложности вычислить положение следующего пробного сегмента, и так до тех пор, пока искомая информация не будет получена. После приема таких проб, как было сказано ранее, можно приступать к приему данных в штатном режиме.
Недостатком разработанного алгоритма является его малая помехоустойчивость по сравнению с алгоритмом обнаружения и захвата по синхропреамбуле. Так как длительность фильтруемого сегмента гораздо меньше длительности преамбулы, то и получаемый в результате фильтрации отклик менее различим в шумовых условиях. Кроме того, для получения импульсной характеристики и вычисления расстройки частоты приходится использовать короткие сегменты проб, прерываемые последовательностями информационных (неизвестных) данных. Таким образом, получаемая характеристика является менее точной, что может привести к ошибке демодуляции пробы, содержащей информацию о режиме передачи. Следовательно, более вероятна ошибка определения скорости передачи и длины перемежителя.
На рисунке 4 показаны сравнительные кривые помехоустойчивости для описанного алгоритма и алгоритма захвата синхропреамбулы, рекомендованного в [5].
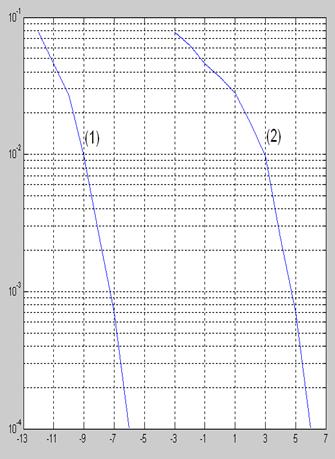
Рис. 4. Сравнение помехоустойчивости алгоритма детектирования по преамбуле (1) и описанного выше (2)
Однако разработанный алгоритм позволяет производить детектирование присутствующего сигнала в любой момент на относительно небольшом временном интервале, что удовлетворяет требованиям [4]. Кроме того, данный алгоритм может использоваться как часть системы определения занятости канала с возможностью получения первичной оценки характеристик и качества канала. Эти возможности важны для процедур автоматического установления канала, которые запланированы в данном модеме. Также использование разработанного алгоритма позволяет осуществлять переход на прием данных в случае пропуска синхропреамбулы. При этом алгоритм не требует высокой вычислительной мощности и может быть реализован для современных сигнальных процессоров.
Рецензенты:
Хранилов В.П., д.т.н., профессор, зам. директора по НИР и магистратуре НГТУ им. Р.Е. Алексеева, г. Нижний Новгород;
Рындык А.Г., д.т.н., профессор, зав. кафедрой «Информационные радиосистемы» НГТУ им. Р.Е. Алексеева, г. Нижний Новгород.
Библиографическая ссылка
Ямпольский А.А., Дунаев А.С., Семашко А.В. АЛГОРИТМ ТЕКУЩЕЙ ОЦЕНКИ ЗАНЯТОСТИ КАНАЛА СИГНАЛАМИ MIL-STD-188-110 // Современные проблемы науки и образования. 2015. № 2-1. ;URL: https://science-education.ru/ru/article/view?id=21416 (дата обращения: 26.06.2026).