



На сегодняшний день при выборе ИС предпочтение, как правило, отдается магнитометрическим ИС, обладающим достаточной точностью и приемлемой ценой. Для измерения углов ориентации скважины в большинстве магнитометрических ИС традиционно используют неподвижно и ортогонально закрепленные в корпусе скважинного модуля три феррозонда и три акселерометра.
Дальнейшее развитие ИС связано с такими факторами, как уменьшение массогабаритов, стоимости и времени измерений, увеличение точности, реализация возможности работы в процессе бурения и др. [1, 5]. Таким образом, имеет место научно-техническая задача, заключающаяся в адаптации и дальнейшем использовании в составе ИС современных технологий, аппаратуры и датчиков.
В настоящее время наибольшее распространение в области построения первичных магнитных датчиков, обеспечивающих регистрацию параметров магнитного поля, получил анизотропный магниторезистивный (АМР) эффект. Сущность эффекта заключается в способности пермаллоевой пленки изменять свое сопротивление в зависимости от взаимной ориентации протекающего через нее тока и направления ее вектора намагниченности.
К преимуществам АМР датчиков относят:
высокую чувствительность (![]() мВ/В/Тл·10-4);
высокую разрешающую способность (ΔВ=2,7 нТл); широкий частотный диапазон (f=0–1кГц); малые
массогабаритные показатели; широкий диапазон рабочих температур (–55…+150ºС); высокие показатели надежности и срока
эксплуатации; низкую стоимость (цена одноосного датчика составляет 1500–1700
рублей) [2, 3].
мВ/В/Тл·10-4);
высокую разрешающую способность (ΔВ=2,7 нТл); широкий частотный диапазон (f=0–1кГц); малые
массогабаритные показатели; широкий диапазон рабочих температур (–55…+150ºС); высокие показатели надежности и срока
эксплуатации; низкую стоимость (цена одноосного датчика составляет 1500–1700
рублей) [2, 3].
Лидером по производству датчиков на основе АМР эффекта с характеристиками, сопоставимыми, а в некоторых случаях превосходящими феррозондовые преобразователи, является компания Honeywell (США) [2, 3, 8]. На рисунке 1 представлен внешний вид наиболее распространенных и универсальных датчиков из линейки одно- и двухосевых магниторезистивных сенсоров HMC1001 и HMC1002 соответственно [8].
Рис. 1. Внешний вид датчиков HMC1001 и HMC1002
Целью настоящей работы являются синтез математической модели АМР преобразователя, адаптированной для проектирования магнитометрических информационно-измерительных систем, а также оценка возможности его включения в состав ИС.
Схемотехника и математическая модель АМР преобразователя
Метод измерения сопротивления АМР преобразователя заключается в пропускании постоянного тока через имеющийся резистивный элемент с последующим измерением падения напряжения на нем (рис. 2).
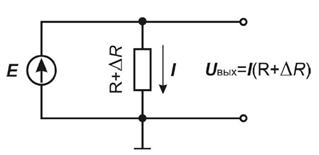
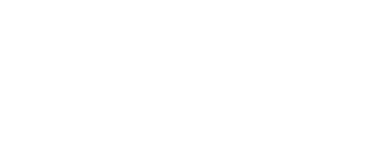
Рис. 2. Использование источника постоянного тока для косвенного изменения сопротивления
При подобном схемотехническом подходе к косвенной оценке сопротивления необходимо обеспечивать постоянство тока возбуждения и точность измерения выходного напряжения. При этом мощность, рассеиваемая на резистивном датчике, должна быть достаточно малой во избежание ошибок, связанных с саморазогреванием чувствительного элемента, и соответствовать техническими условиями эксплуатации, установленным производителем. Отсюда следует, что номинал тока возбуждения необходимо минимизировать.
Построение АМР преобразователя осуществляется путем соединения по мостовой схеме четырех идентичных магниторезисторов (рис. 3).
Рис. 3. Мостовая схема соединения АМР элементов
В свою очередь, каждый магниторезистор представляет собой несколько последовательно соединенных АМР полосок, сформированных путем осаждения тонкого пермаллоя на кремниевую пластину [2, 3, 8]. Под тонким магнитным слоем понимается такая толщина магнитомягкого материала, на которой может располагаться лишь один магнитный домен. Таким образом, толщина тонких пленок, используемых в качестве рабочего тела сенсорных элементов, колеблется от единиц до сотен нанометров. Важным преимуществом использования тонкопленочных магнитных элементов является возможность применения для их изготовления единой пленочной технологии – одного из перспективных направлений микроминиатюризации электронной аппаратуры.
Исследования модернизированной структуры АМР измерительных элементов и физики процессов, протекающих в их объеме, позволили сформулировать и записать унифицированную математическую модель как функцию вариаций номинала сопротивления АМР элемента, связанных с изменением параметров внешнего магнитного поля от режима эксплуатации АМР сенсорного модуля [2, 3].
Параметры выходного сигнала определяются согласно выражению:
![]() (1)
(1)
где ![]() – выходной сигнал, R1, R2, R3, R4
– номиналы сопротивлений плеч измерительного моста,
– выходной сигнал, R1, R2, R3, R4
– номиналы сопротивлений плеч измерительного моста, ![]() –
напряжение питания моста (рис. 3).
–
напряжение питания моста (рис. 3).
Добиться максимального сигнала на выходе, а также линейной связи между выходом моста и изменением величины чувствительности резистора (отношение максимально ожидаемого изменения выходного напряжения к напряжению возбуждения) можно, используя топологию соединения АМР элементов типа «полный мост».
Сопротивление пермаллоевой пленки можно оценить согласно выражению [2, 3]:
![]()
![]() (2)
(2)
где ![]() – сопротивление при
условии отсутствия внешнего магнитного поля,
– сопротивление при
условии отсутствия внешнего магнитного поля, ![]() –
максимально возможное изменение сопротивления, Н
и Н0 – напряженность измеряемого и
подмагничивающего поля соответственно.
–
максимально возможное изменение сопротивления, Н
и Н0 – напряженность измеряемого и
подмагничивающего поля соответственно.
Используя выражения (1) и (2) и полагая, что АМР элементы
магнитного датчика ориентированы таким образом, что ![]() а
а
![]() , получим:
, получим:
 (3)
(3)
Согласно выражению (3) выходной сигнал прямо пропорционален напряжению питания моста и напряженности измеряемого поля.
Итак, синтезированная математическая модель включает основные параметры, воздействующие на АМР сенсорный модуль, обладает линейным характером выходной характеристики и информативной формой записи, что значимо при выполнении НИОКР, а также в ходе проведении оценочных и инженерных расчетов
Инклинометрическая система на базе АМР преобразователей
Объективно говорить о возможности включения АМР датчиков в состав ИС можно в результате анализа эксплуатационного, габаритного, экономического и точностного показателей. Поскольку первые три показателя удовлетворяют требованиям, предъявляемым к первичным датчикам для ИС, в настоящей работе проведен анализ только точностного критерия.
Точностную оценку можно провести, опираясь на тот факт, что погрешность измерительной системы зависит от погрешности первичных датчиков. Таким образом, если оценить влияние погрешности датчика на точность ИС, то в результате можно сделать вывод о возможности использования АМР преобразователя в составе ИС.
В данной статье рассматривается влияние погрешности АМР
датчиков на погрешность измерения азимутального угла ![]() . Погрешности зенитного
. Погрешности зенитного ![]() и визирного
и визирного ![]() углов
определяются применяемыми в ИС акселерометрами и в данной статье не
рассматриваются [1].
углов
определяются применяемыми в ИС акселерометрами и в данной статье не
рассматриваются [1].
Погрешность ИС на базе АМР датчиков определяется такими параметрами, как нестабильность источника питания, неидентичность первичных датчиков, наличие источников геомагнитных аномалий вблизи скважины, погрешность коэффициента преобразования и др.
Идеальные выходные сигналы АМР датчиков можно представить в виде:
![]() (4)
(4)
где ![]() – коэффициент
преобразования АМР датчика;
– коэффициент
преобразования АМР датчика; ![]() – проекция
напряженности магнитного поля Земли на соответствующую ось чувствительности
используемых приборов.
– проекция
напряженности магнитного поля Земли на соответствующую ось чувствительности
используемых приборов.
Тогда сигналы с триады АМР датчиков имеют следующую форму записи [4]:
 (5)
(5)
где ![]() – угол
магнитного наклонения,
– угол
магнитного наклонения, ![]() – угол магнитного
склонения.
– угол магнитного
склонения.
Подставляя значения идеальных выходных сигналов (5) в формулу для расчета азимута, а затем значения сигналов с учетом погрешности АМР датчиков, в результате можно получить абсолютную погрешность измерения азимута [4]:

![]() (6)
(6)
Поскольку речь идет о математическом моделировании, то для приближения результатов к реальным условиям, для учета неидентичности датчиков и различных способов установки в измерительном модуле ИС предложено производить расчет по следующей схеме.
Рассматриваются три комбинации: когда погрешность одного АМР
датчика максимальна, а остальных равняется нулю. Для каждой комбинации
рассчитывается значение абсолютной погрешности азимута ![]() по формуле (6). Тогда суммарная
абсолютная погрешность ИС может быть найдена по формуле [6, 7]:
по формуле (6). Тогда суммарная
абсолютная погрешность ИС может быть найдена по формуле [6, 7]:
![]() (7)
(7)
Для приближения моделирования к реальным условиям значения
углов взяты в следующих диапазонах: ![]() ,
, ![]() ,
, ![]() ,
а значение широты для реальных месторождений – Азнаевское, Ярактинское,
Когалымское, Губкинское и Ванкорское.
,
а значение широты для реальных месторождений – Азнаевское, Ярактинское,
Когалымское, Губкинское и Ванкорское.
На рисунке 4 представлены примеры зависимостей,
характеризующих распределение абсолютной погрешности азимута по диапазонам
измеряемых углов ![]() на различных широтах.
на различных широтах.
Среднее значение погрешности азимута во всем диапазоне измеряемых углов для вышеперечисленных широт представлено в таблице 1.
Таблица 1
Среднее значение погрешности азимута
|
Месторождения |
Азнаевское |
Ярактинское |
Когалымское |
Губкинское |
Ванкорское |
|
Широта, град |
53 |
57 |
61 |
64 |
67 |
|
|
0,362 |
0,505 |
0,560 |
0,676 |
0,87 |
Оценка серии полученных результатов позволила сделать следующие выводы: характер (вид) распределения абсолютной погрешности азимута зависит от значения азимутального угла и не зависит от широты месторождения; рост широты месторождения вызывает увеличение абсолютной погрешности измерения азимута (рис. 4).
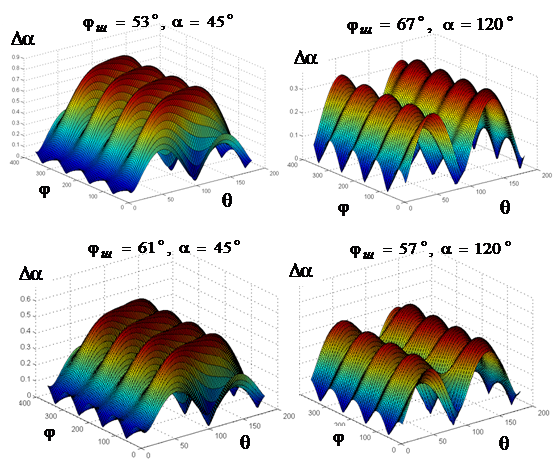
Рис.4. Распределение абсолютной погрешности азимута ![]()
Согласно
технической инструкции по проведению геофизических исследований и работ
приборами на кабеле в нефтяных и газовых скважинах (Руководящий документ РД 153-39.0-072-01
министерства энергетики Российской Федерации) основная погрешность измерения
азимута должна удовлетворять условию ![]() град. Следовательно,
магнитометрический модуль на базе АМР датчиков обеспечивает заданную точность
измерений азимута и может быть использован в составе ИС.
град. Следовательно,
магнитометрический модуль на базе АМР датчиков обеспечивает заданную точность
измерений азимута и может быть использован в составе ИС.
Работа поддержана грантами РФФИ и грантом Президента Российской Федерации: №№ 14-07-00260-а, 14-07-31344-мол_а, 15-17-20002-Д_С, 15-07-02731-а, МК-5340.2015.9.
Рецензенты:
Веревкин А.П., д.т.н., профессор, ФГБОУ ВПО «Уфимский государственный нефтяной технический университет», г. Уфа;
Даринцев О.В., д.т.н., зав. лабораторией «Робототехника и управление в технических системах», ФГБУН «Институт механики им. Р.Р. Мавлютова», г. Уфа.
Библиографическая ссылка
Воробьев А.В., Иванова Г.А., Шакирова Г.Р. ИНКЛИНОМЕТРИЧЕСКАЯ СИСТЕМА НА БАЗЕ АНИЗОТРОПНЫХ МАГНИТОРЕЗИСТИВНЫХ ПРЕОБРАЗОВАТЕЛЕЙ // Современные проблемы науки и образования. 2015. № 1-2. ;URL: https://science-education.ru/ru/article/view?id=20237 (дата обращения: 02.08.2026).