



Конструкция НСПТ для литых и порошковых ПМ, намагниченных вдоль продольной оси, приведена на рисунке 1. Она содержит намагничивающие катушки НК, магнитопровод М броневой конструкции, в полюсах которого находится сквозной канал с помещенной в него немагнитной направляющей Н. В центральной части направляющей находится блок первичных преобразователей индукции и напряженности ИК. Работает НСПТ следующим образом. Испытуемый ПМ поступает в направляющую и движется по ней под действием силы тяжести.
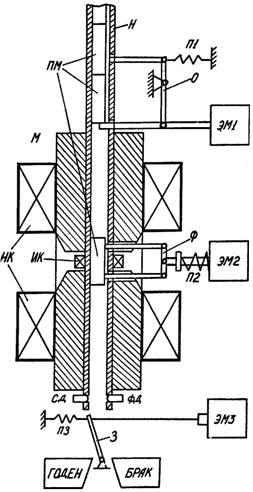
Рис. 1. Конструкция НСПТ
Одновременно в намагничивающие катушки подается ток, создающий в межполюсном пространстве НСПТ магнитное поле напряженностью, достаточной для фиксации ПМ в измерительной позиции (центр межполюсного пространства). После установки ПМ в измерительную позицию срабатывают механические фиксаторы Ф, удерживающие его в этом положении. Далее осуществляется перемагничивание ПМ по заданной программе под действием магнитного поля, создаваемого током в намагничивающих катушках. Электромагниты ЭМ1–ЭМ3 и пружины П1–П3 приводят в действие отсекатель О, фиксатор Ф и заслонку З соответственно.
Для оптимального проектирования НСПТ [6, 7, 10] необходима модель, описывающая процесс движения ПМ. Уравнение движения изделия в системе данного типа имеет вид:
|
|
(1) |
где
y - расстояние между центром изделия и
центром межполюсного пространства; m - масса изделия; Р - сила тяжести изделия; Ft, Fn
- тангенциальная и нормальная
составляющие электромагнитной силы, действующей на изделие; ![]() - коэффициент трения изделия о стенки
направляющей; Bнс(H), Bи(Н) - магнитные характеристики материалов
магнитопровода системы и изделия; G
- обобщенный параметр геометрических
размеров изделия и межполюсного пространства системы.
- коэффициент трения изделия о стенки
направляющей; Bнс(H), Bи(Н) - магнитные характеристики материалов
магнитопровода системы и изделия; G
- обобщенный параметр геометрических
размеров изделия и межполюсного пространства системы.
При
решении уравнения (1) наибольшую сложность представляет определение
тангенциальной Ft
и нормальной Fn
составляющих электромагнитной силы, действующей на испытуемое изделие. Использование
метода конечных элементов (МКЭ) позволяет решить задачу расчета проекций Fx и Fy вектора электромагнитной силы ![]()
При анализе различных вариантов НСПТ для определения сил, действующих на испытуемое изделие, использовались как расчетные методы теории поля, так и экспериментальные исследования. Измерение сил Fy и Fx производилось на установке, принцип действия которой поясняет рисунок 2.
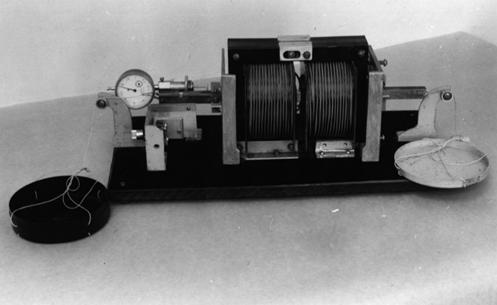
Рис. 2. Экспериментальная установка
Для измерения силы Fy выставляют заданные значения тока в катушках НСПТ и значения координаты y. Изменяя массу грузов, добиваются равновесия. Измерение силы Fx производится методом замещения. При заданных значениях тока и координаты y измеряют прогиб вставки. Затем такие же значения прогиба получают при помощи грузов на снятой из экспериментальной установки вставке. Координата y измеряется индикатором часового типа с ценой деления 0,01 мм; в качестве грузов используются наборы разновесов Г-4-1111.10; измерение деформации производится тензорезисторами типа 2ПКБ-20-200, измерительным преобразователем Ш74/2 и цифровым вольтметром В7-34А.
На основе анализа результатов исследований различных образцов систем данного типа предложено силы Fy и Fx аппроксимировать выражениями:
![]() ;
; ![]() ,
,
где G1, G2, G3, аy, аx, n, q - коэффициенты, определяемые геометрическими размерами испытуемого изделия и межполюсного пространства системы.
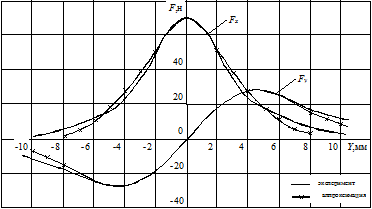
Рис. 3. Результаты аппроксимации сил Fy, Fx
Погрешность аппроксимации составила 3% и
6% для Fy и Fx соответственно. Значения погрешности [8, 9]
определялись по формуле 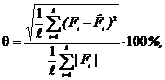
где
![]() - количество сопоставляемых точек;
- количество сопоставляемых точек; ![]() - значения экспериментальной и расчетной
сил в точке сопоставления i.
- значения экспериментальной и расчетной
сил в точке сопоставления i.
Моделирование ПМ произведено путем решения уравнения (1) с помощью пакета MATHLAB. Расчитано изменение координаты центра ПМ во времени. На рисунке 4 представлены траектория и фазовый портрет движения ПМ. Для ПМ массой 0,01 кг получено время движения в измерительную позицию – 0,45 с, точность позиционирования – 0,6 мм. При изменении массы ПМ от 0,0093 кг до 0,0107 кг время движения в измерительную позицию менялось от 0,39 с до 0,45 с, а точность позиционирования — от 0,51 мм до 0,43 мм.
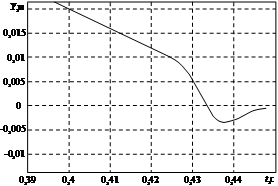
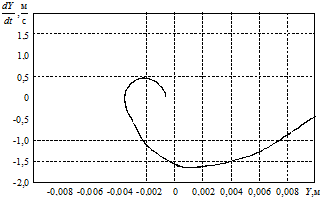
Рис. 4. Траектория и фазовый портрет движения ПМ
Используя понятие фазового пространства, уравнение (1) представим в виде:
|
|
(2) |
где g - ускорение свободного падения; z = dy/dt.
Так как для правой части (2) не выполняются условия Коши, представим его в виде двух уравнений, для каждого из которых они выполняются:
![]() ,
,
![]() .
.
На рисунке 5 изображен фазовый портрет движения ПМ. Движение устойчиво в малом, но неустойчиво в целом.
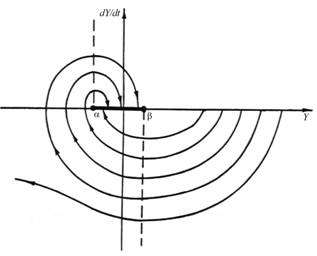
Рис. 5. Фазовый портрет движения ПМ
Координаты концов отрезка [a, b], определяющие предельные значения погрешности остановки ПМ, могут быть вычислены из уравнений:
![]()
![]() .
.
Решая
их для области ![]() , получим:
, получим:
 ,
,
 .
.
В процессе движения ПМ получает энергию от сил электромагнитной природы и расходует ее на преодоление сил трения. В процессе движения энергия переходит из потенциальной формы в кинетическую и обратно. Энергетические процессы определяют характер движения ПМ. Запишем выражение для энергии ПМ, находящегося в точке с координатой y и обладающего скоростью z:
|
|
(3) |
где
![]() F+ - соответствует
F+ - соответствует ![]() ; F- - соответствует
; F- - соответствует ![]() .
.
Дифференцируя по времени выражение (3), получим:
|
|
(4) |
С учетом (2) выражение (4) примет вид:
|
|
(5) |
Последнее выражение показывает, что суммарная энергия образца постоянна на каждом участке фазовой траектории, для которого справедливо sign z = const.
Выделим из (3) потенциальную энергию:
![]()
![]()
Пусть движение образца начинается в момент времени t = 0, причем y(0) = y0 > 0, z(0) = 0, тогда с учетом выражения (5) имеем:
|
|
(6) |
где
![]()
![]() y1 = -y0 + c
- первая точка пересечения фазовой
траекторией движения ПМ оси OY
при заданных начальных условиях; c - величина уменьшения радиуса фазовой
траектории движения образца.
y1 = -y0 + c
- первая точка пересечения фазовой
траекторией движения ПМ оси OY
при заданных начальных условиях; c - величина уменьшения радиуса фазовой
траектории движения образца.
Преобразуем (6), используя разложение в
ряд Тейлора и отбросив величины второй степени малости: ![]() .
.
Учитывая четность ![]() и
и ![]() и
нечетность
и
нечетность ![]() и
и ![]() , из
последнего выражения получим
, из
последнего выражения получим ![]()
 .
.
Используя те же начальные условия, что и раньше, и с учетом (5) можно записать для энергии образца в точке с координатой y1:
![]() откуда
откуда
 ,
а
,
а ![]()
Из последнего выражения определим время
перехода от точки с координатой y0 в точку с координатой y1: 
Обобщив полученный результат на p-ое пересечение фазовой траекторией оси OY, можно записать:
 ,
,
Использование этих выражений и условие
остановки образца ![]() позволяет без расчета фазовой
траектории движения образца, при заданных начальных условиях рассчитать
значение времени движения и погрешности установки ПМ.
позволяет без расчета фазовой
траектории движения образца, при заданных начальных условиях рассчитать
значение времени движения и погрешности установки ПМ.
Исследованы НСПТ, обеспечивающие автоматизацию процесса измерения и способные с высокой производительностью осуществлять транспортировку, ориентацию, фиксацию в измерительной позиции и перемагничивание испытуемых ПМ. Разработана математическая модель НСПТ, описывающая процесс движения ПМ. Предложены уравнения аппроксимации проекций вектора электромагнитной силы, действующей на ПМ в процессе движения его в измерительную позицию. НСПТ устройств испытаний ПМ обеспечивают суммарное время транспортировки, ориентации и фиксации магнита в измерительной позиции не более 450 мс при погрешности его установки в измерительную позицию не более 0,7 мм.
Статья подготовлена с использованием оборудования ЦКП «Диагностика и энергоэффективное электрооборудование» ЮРГПУ(НПИ).
Рецензенты:Елсуков В.С, д.т.н., профессор кафедры «Автоматика и телемеханика», ФГБОУ ВПО «Южно-Российский государственный политехнический университет (НПИ) имени М.И. Платова», г. Новочеркасск;
Гречихин В.В, д.т.н., профессор кафедры «Информационные и измерительные системы и технологии», ФГБОУ ВПО «Южно-Российский государственный политехнический университет (НПИ) имени М.И. Платова», г. Новочеркасск.
Библиографическая ссылка
Горбатенко Н.И., Ланкин М.В., Ланкин А.М. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОДНОГО КЛАССА НАМАГНИЧИВАЮЩИХ СИСТЕМ // Современные проблемы науки и образования. 2015. № 1-2. ;URL: https://science-education.ru/ru/article/view?id=19856 (дата обращения: 02.08.2026).
DOI: https://doi.org/10.17513/spno.125-19856