



С целью снижения срока разработки проектов лесовозных автомобильных дорог за счёт уменьшения времени поиска оптимального варианта разработана имитационная система «ЛЕСОВОЗНАЯ ДОРОГА» (рисунок 1), обеспечивающая повышение достоверности и существенное расширение номенклатуры транспортно-эксплуатационных показателей работы дороги, уменьшение времени моделирования работы дороги, снижение затрат времени на подготовку данных путём автоматического согласования результатов с уже эксплуатируемыми комплексами программ.
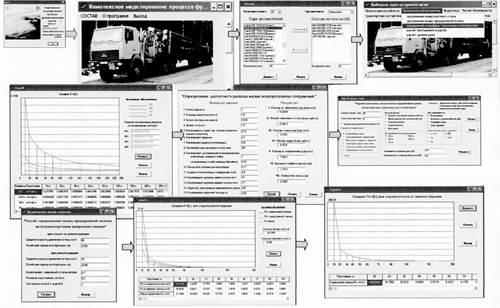
Рис. 1. Разработанная программа «Лесовозная дорога»
Теоретический анализ. Исходными данными программы, оценивающей проектное решение, являются: параметры продольного профиля; параметры поперечного профиля; параметры проезжей части; параметры плана; параметры дорожной обстановки.
Создание имитационной системы «ЛЕСОВОЗНАЯ ДОРОГА» потребовало решения отдельных сложных задач – обобщения теории транспортных потоков, разработки методик расчёта: расхода топлива, эксплуатационных расходов, транспортной составляющей себестоимости перевозок, экологических показателей, оценки надежности водителей. Имитационная система моделирования процесса функционирования лесовозной дороги включает следующие модули: ТРАССА, СРЕДА, ПОТОК, ВОДИТЕЛЬ (рисунок 2) [3-5].
Методика. Модуль ТРАССА анализирует геометрические элементы дороги и снимает информацию о дорожных условиях. Одна из главных задач модуля – это анализ видимости поверхности дороги и встречного автомобиля.
Алгоритм модуля ТРАССА.
1. Ввод параметров плана, профиля, данных о боковых препятствиях.
2. Расчёт элементов кривых: ![]()
![]()
![]() , НК=ВУ-Т, КК=НК+К и т.д.), азимутов трассы, лучей зрения водителей
, НК=ВУ-Т, КК=НК+К и т.д.), азимутов трассы, лучей зрения водителей  ,
,  .
.
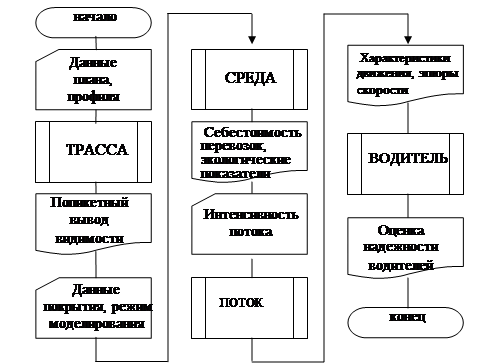
Рис. 2. Обобщённый алгоритм программы «ЛЕСОВОЗНАЯ ДОРОГА»
3. Расчёт видимости в плане по 4 схемам и выбор максимального значения:
 - схема 1,
- схема 1,  - схема 2,
- схема 2,  - схема 3,
- схема 3,  - схема 4.
- схема 4.
4. Расчёт видимости в профиле прямо (![]() j=1..n;
j=1..n;  ),
), ![]() и т.д.).
и т.д.).
5. Инверсия отметок, уклонов.
6. Расчёт видимости в профиле обратно.
7. Вывод таблиц попикетной видимости в плане, профиле.
8. Построение эпюр видимости поверхности дороги.
Расчёты видимости с каждого пикета выполняются отдельно для плана и отдельно для продольного профиля. Эпюра видимости строится по минимальным значениям видимости на пикетах. При расчётах расстояний видимости моделируется восприятие водителем трассы.
Для работы программы СРЕДА вводят данные, подготовленные модулем ТРАССА. Модуль СРЕДА обеспечивает моделирование восприятия непрерывной последовательности элементов дороги механической подсистемой «дорога - автомобиль» и подсистемой «дорога – водитель - среда» [10].
Алгоритм модуля СРЕДА.
1. Создание нормативно-справочной базы технико-экономических параметров автомобилей, входящих в состав потока.
2. Расчёт длины подъёмов и спусков и установление ограничений скорости.
3. Установление режима движения.
4. Проверка наката или торможения. Расчёт скорости, п.7.
5. Расчёт скорости с учётом ограничений.
6. Установление степени открытия дросселя, выбор номера передачи.
7. Расчёт расхода топлива ( ).
).
8. Расчёт эксплуатационных затрат  .
.
9. Расчёт экологических показателей
9.1. Определение удельной эмиссии загрязняющих веществ по компонентам  ;
;
9.2 Определение концентрации загрязнения атмосферного воздуха различными компонентами в зависимости от расстояния от дороги ![]() ;
;
9.3 Определение предельно допустимой концентрации загрязняющего вещества в поверхностном стоке по каждому ингредиенту загрязнения с учётом смешения его с водами водотока  ;
;
9.4 Определение концентрации свинца, кадмия, цинка, никеля, меди, хрома в почве ![]() .
.
10. Расчёт составляющих себестоимости перевозок: затрат по топливу (![]() ), амортизации (
), амортизации ( ), шинам (
), шинам ( ).
).
11. Расчёт коэффициентов безопасности по В.Ф. Бабкову (ko:=k1×k2×k3×k4×k5×k6×k7×k8×k9×k10×k11×k14).
12. Попикетный вывод эпюр экологических показателей, коэффициентов безопасности и эпюр себестоимости.
13. Таблица показателей движения в обоих направлениях.
Модуль ПОТОК позволяет получать результаты моделирования процесса функционирования лесовозных автомобильных дорог (I-в, II-в, III-в, IV-в категорий), обусловленных случайным характером дорожного движения. Непрерывное изменение от пикета к пикету проектируемых характеристик дороги создаёт по каждому варианту последовательность дорожных условий, формирующих режимы движения, присущие только данному участку дороги.
Алгоритм программы ПОТОК.
1. Определение средней гармонической временной скорости ![]() .
.
2. Расчёт зависимости между скоростью и плотностью  .
.
3. Расчёт ограничения скорости 
4. Расчёт среднего пространственного интервала между автомобилями ![]() .
.
5. Расчёт интенсивности транспортного потока ![]() .
.
6. Расчёт границ плотности потока  .
.
7. Расчёт пространственной координаты  при
при ![]() .
.
8. При условии стационарности потока скорость ![]() , плотность
, плотность ![]() .
.
9. Расчёт плотности распределения произвольных интервалов между автомобилями в потоке  .
.
10. Вывод характеристик движения автомобилей по обоим направлениям.
Модуль «ВОДИТЕЛЬ» выполняет оценку надежности водителей автотранспортных средств.
Для оценки уровня надежности водителя программа использует критерий надежности
![]() , (23)
, (23)
где ![]() – критерий безопасности;
– критерий безопасности; ![]() – критерий производительности перевозки груза;
– критерий производительности перевозки груза; ![]() – критерий экономичности;
– критерий экономичности; ![]() – критерий экстремальных условий;
– критерий экстремальных условий; ![]() – критерий знаний основ механики.
– критерий знаний основ механики.
Алгоритм программы «ВОДИТЕЛЬ»:
1. Проверка исправности, технического состояния индикаторов и контрольно-измерительных приборов лесовозного автопоезда.
2. Определение маршрута испытания протяженностью один час езды при скорости 40…80 км/ч.
3. Синхронизация сбора данных, калибровка каналов измерительно-регистрирующей аппаратуры.
4. Определение нормативных значений скорости движения ![]() , расхода топлива на маршруте
, расхода топлива на маршруте ![]() , средневзвешенного значения передаточного числа коробки передач
, средневзвешенного значения передаточного числа коробки передач ![]() .
.
5. Выполнение около 40 заездов 20 испытуемых водителей по заданному маршруту на лесовозном автопоезде, оборудованном комплексом бортовой аппаратуры с измерением продолжительности движения лесовозного автопоезда, количества оборотов коленчатого вала.
6. Обработка результатов и заключение об уровне надежности водителя.
На основании критериев ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() определяется интегральный критерий надежности водителя К. Причём, если надежность водителя высокая, то
определяется интегральный критерий надежности водителя К. Причём, если надежность водителя высокая, то ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
![]() 1,0. Если мастерство водителя недостаточно, значения показателей
1,0. Если мастерство водителя недостаточно, значения показателей ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() <1.0.
<1.0.
Оптимизация проекта достигается построением эпюр:
- эпюр эмиссии токсичных веществ, выявляющих уровень концентрации токсичных веществ в придорожном пространстве;
- эпюр скорости, отражающих влияние дорожных условий на режимы движения;
- эпюр расхода топлива, являющихся индикатором в энергосберегающих проектных решениях.
Задача выбора новых параметров, улучшающих дорогу при вариантном проектировании, очень сложная и необходим направленный поиск наилучшего варианта, основанный на декомпозиции проблемы поиска вариантов путём рассмотрения агрегированных характеристик. Агрегирование заключается в замене большого комплекса характеристик и конструктивных параметров дороги небольшим количеством обобщённых характеристик и параметров. Из этих параметров на каждом этапе проектирования выбираются наиболее важные. На этапе вариантного проектирования трассы такими обобщающими параметрами можно считать V – расчётную скорость, H – условия проложения дороги через населённые пункты, П - условия пересечения с другими дорогами. Имеется набор параметров ![]() , при которых дорога имеет наименьшую стоимость
, при которых дорога имеет наименьшую стоимость ![]() , другой набор
, другой набор ![]() ,
,![]() ,
,![]() , при которых прогнозируется наименьшее количество ДТП, оцениваемое величиной
, при которых прогнозируется наименьшее количество ДТП, оцениваемое величиной ![]() , имеется набор
, имеется набор ![]() ,
, ![]() ,
,![]() , обеспечивающий минимум затрат на перевозки
, обеспечивающий минимум затрат на перевозки ![]() [1-3].
[1-3].
Любой вариант дороги отличается по своим характеристикам ![]() от идеальных решений. Это отклонение определяется величиной
от идеальных решений. Это отклонение определяется величиной ![]() для стоимости дорог
для стоимости дорог
 . (1)
. (1)
Коэффициенты ![]() находятся в пределах от 0 до 1 и показывают, насколько тот или иной вариант дороги хуже соответствующего идеального решения по i-ой характеристике.
находятся в пределах от 0 до 1 и показывают, насколько тот или иной вариант дороги хуже соответствующего идеального решения по i-ой характеристике.
Характеристики ![]() не одинаково важны для оптимального варианта. Для определения их важности введены относительные веса
не одинаково важны для оптимального варианта. Для определения их важности введены относительные веса ![]() , тогда оптимальный вариант дороги
, тогда оптимальный вариант дороги
![]() (2)
(2)
Для оптимального варианта существует такое сочетание ![]() , которое обеспечивает минимум приведённых затрат. Задача направленного вариантного проектирования заключается в установлении этих значений. По каждому варианту дороги с уровнем затрат С смоделирован пропуск транспортных потоков расчётной интенсивности, определив по результатам моделирования характеристики D ,Э, рассчитываем приведённые суммарные затраты Р [6-9].
, которое обеспечивает минимум приведённых затрат. Задача направленного вариантного проектирования заключается в установлении этих значений. По каждому варианту дороги с уровнем затрат С смоделирован пропуск транспортных потоков расчётной интенсивности, определив по результатам моделирования характеристики D ,Э, рассчитываем приведённые суммарные затраты Р [6-9].
Так как значения ![]() , заранее известны, то ими нужно задаться в виде сетки с узлами
, заранее известны, то ими нужно задаться в виде сетки с узлами ![]() (
(![]() ). Для каждого
). Для каждого ![]() -го узла (набора значений
-го узла (набора значений ![]() ) следует найти значения
) следует найти значения ![]() при которых
при которых ![]() достигает минимума. Значения
достигает минимума. Значения ![]() находят решением уравнений
находят решением уравнений ![]() . Значения
. Значения ![]() направленно определяют требования к новому варианту трассы. Конструктивные параметры этого варианта служат исходной информацией для моделирования дорожного движения имитационной системой. Результаты этого моделирования используются для вычисления критерия
направленно определяют требования к новому варианту трассы. Конструктивные параметры этого варианта служат исходной информацией для моделирования дорожного движения имитационной системой. Результаты этого моделирования используются для вычисления критерия ![]() . Затем выбирается другой узел
. Затем выбирается другой узел ![]() (другие значения
(другие значения ![]() ), процесс повторяется и вычисляется новое значение
), процесс повторяется и вычисляется новое значение ![]() . Таким образом, на сетке
. Таким образом, на сетке ![]() находится узел, при котором
находится узел, при котором ![]() достигает минимума. Этим окончательно определяется вариант дороги, наилучшим образом сочетающий основные транспортно-эксплуатационные характеристики: стоимость, безопасность, экономичность, и обеспечивающий минимум приведённых затрат.
достигает минимума. Этим окончательно определяется вариант дороги, наилучшим образом сочетающий основные транспортно-эксплуатационные характеристики: стоимость, безопасность, экономичность, и обеспечивающий минимум приведённых затрат.
Результаты – определение оптимального проектного решения с гармоническим сочетанием транспортно-эксплуатационных, экономических и экологических показателей, тем самым снижение сметной стоимости строительства объектов и их материалоёмкости на 10-15 %, сокращение сроков проектирования.
Рецензенты:
Афоничев Д.Н., д.т.н., заведующий кафедрой электротехники и автоматики ФГБОУ ВПО «Воронежский государственный аграрный университет имени императора Петра I», г. Воронеж;
Скрыпников А.В., д.т.н., профессор, заведующий кафедрой информационной безопасности ФГБОУ ВПО «Воронежский государственный университет инженерных технологий», г. Воронеж.
Библиографическая ссылка
Козлов В.Г., Кондрашова Е.В., Заболотная А.А., Скворцова Т.В. МОДЕРНИЗАЦИЯ ИМИТАЦИОННОЙ СИСТЕМЫ ПРОЦЕССА ФУНКЦИОНИРОВАНИЯ АВТОМОБИЛЬНЫХ ДОРОГ С ИСПОЛЬЗОВАНИЕМ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/ru/article/view?id=19651 (дата обращения: 01.07.2026).