



Скелетные мышцы состоят из двигательных единиц (ДЕ) - наименьших мышечных элементов, которые могут быть активизированы усилием воли. ДЕ состоит из передней роговой клетки или мотонейрона, аксона и всех мышечных волокон, возбуждаемых этим аксоном. Количество мышечных волокон, приходящихся на одно двигательное волокно, называется коэффициентом иннервации. Коэффициент иннервации для различных мышц может колебаться от десятка до сотен единиц [6]. Сокращение мышцы является суммарным результатом стимуляции и сокращения нескольких ДЕ. Механизм мышечного сокращения описывается теорией скользящих нитей, согласно которой укорочение каждого мышечного волокна при сокращении происходит в результате перемещения тонких нитей в промежутках между толстыми без изменения их длины [3].
Потенциал действия распространяется, начиная с нейромышечных сочленений, в обоих направлениях внутри мышечного волокна через тубулярную систему [3]
Стимуляция каждой ДЕ нейронным сигналом вызывает их сокращение, в результате которого генерируется электромиографический сигнал (ЭМГ), который представляет собой сумму потенциалов действия всех вовлеченных в процесс клеток [6].
Математическую модель ЭМГ сигнала можно упрощенно представить следующим уравнением:
 (1)
(1)
где ![]() - биопотенциалы ЭМГ сигнала,
- биопотенциалы ЭМГ сигнала, ![]() – ПДОДЕ,
– ПДОДЕ, ![]() импульс раздражения,
импульс раздражения, ![]() – аддитивный белый гауссовский шум, N – число ДЕ, вовлеченных в процесс сокращения.
– аддитивный белый гауссовский шум, N – число ДЕ, вовлеченных в процесс сокращения.
Управление движениями немыслимо без согласования активности большого количества мышц. Следовательно, для осуществления движения должна быть сформирована двигательная программа. Двигательную или центральную программу рассматривают как заготовленный набор базовых двигательных команд, а также набор готовых корректирующих подпрограмм, обеспечивающих реализацию движения с учётом текущих афферентных сигналов и информации, поступающей от других частей ЦНС.
Динамика движений верхних конечностей. Тело человека представляет собой сложную биомеханическую систему, элементы которой могут испытывать значительные ускорения.
При анализе динамики верхних конечностей необходимо учитывать массы, положения центров масс звеньев а также моменты инерции звеньев. Некоторые из этих параметров трудно измерить, однако, зная вес и рост испытуемого, некоторые параметры можно определить из антропометрических таблиц [1].
При построении расчетных схем для создания моделей динамики движений тела человека актуальным является определение масс-инерционных характеристик (МИХ) сегментов тела человека: масс, моментов инерции, координат центров масс отдельных частей (сегментов) тела. Для определения МИХ используют экспериментальный метод и метод вычислений (косвенный), физическое и математическое моделирование. В настоящее время часто используется геометрическое моделирование, которое обеспечивает, на основе стандартных антропометрических измерений, минимизацию систематических ошибок для МИХ отдельных сегментов за счет введения индивидуальных коэффициентов квазиплотности сегментов [1].
Для определения МИХ совместно с геометрическим моделированием использовалось уравнение регрессии (2).
![]() , (2)
, (2)
где Y - МИХ сегмента, X1 - вес, X2 - длина тела, B0, B1, B2 - значение коэффициентов регрессии [6].
При проведении экспериментальных исследований нами были определены МИХ характеристики участников экспериментов. Усредненные показатели МИХ для десяти испытуемых приведены в таблице 1.
Таблица 1
Масс-инерционные характеристики: X1 = 83,57 кг, СКО =11,41 кг; и роста X2 = 178,5 см,
СКО = 4,31 см
|
Сегмент |
M, кг |
ЦМ, см |
Iсо, гсм2 |
Iфо, гсм2 |
Iпо, гсм2 |
|
Предплечье |
1,146 |
14,45 |
76,082 |
68,868 |
15,524 |
|
Плечо |
2,413 |
13,82 |
149,561 |
135,170 |
46,188 |
|
Кисть |
0,497 |
12,17 |
15,413 |
10,096 |
6.302 |
Примечания. М – масса сегмента, ЦМ – положения центра масс, Iсо – моменты инерции относительно сагиттальной оси, Iфо – моменты инерции относительно фронтальной оси, Iпо – моменты инерции относительно продольной оси.
Если не учитывать движение кисти, то механическая модель руки может быть представлена двумя звеньями: плечо и предплечье. Для каждого звена центр масс и момент инерция сконцентрированы в точках, показанных на рис. 1.
Уравнение движения системы может быть получено с помощью уравнений Лагранжа. Если T является полной кинетической энергией системы, а U - полной потенциальной энергией системы, тогда лагранжиан равен ![]() . Если
. Если ![]() является обобщенной силой, соответствующей
является обобщенной силой, соответствующей ![]() , тогда можно получить уравнение динамики в виде следующего лагранжиана:
, тогда можно получить уравнение динамики в виде следующего лагранжиана:
 (3)
(3)
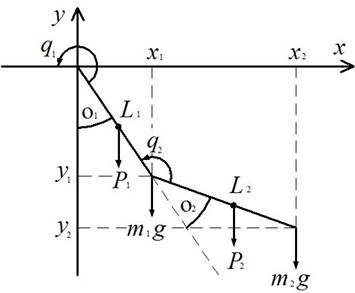
Рис. 1. Эквивалентная механическая схема верхней конечности: L1, L2 – длина; P1, P2 – вес; m1, m2 – масса; q1, q2 – обобщенная координата; ![]() ,
, ![]() - углы поворота плеча и предплечья соответственно[8]
- углы поворота плеча и предплечья соответственно[8]
Предлагаемая модель верхней конечности может быть описана и с помощью уравнения движения следующим образом [4]:
![]() , (4)
, (4)
где H – матрица инерций; С – матрица, определяющая вектор центробежных сил и сил Кориолиса, G – вектор статических сил/моментов, действующих на манипулятор; B – матрица, линейно отображающая входной вектор управляющих воздействий u в обобщенных силах.
Модель (4) позволяет исследовать кинематические параметры движения руки человека при воздействии сил и моментов, развиваемых мышцами.
Моделирования движения верхней конечности. На этапе моделирования решались следующие задачи – идентификация математической модели и проверка адекватности полученной модели ее биологическому аналогу. Анализ параметров движения локтя проводился с учетом кинематических (система отсчета, траектория движения, угловая скорость, угловое ускорение) и динамических (масса, инерция, момент и сила, развиваемая мышцами) особенностей движения руки.
Моделирование проводилось в среде Simulink системы Matlab, с использованием пакета SimMechanicsToolbox. Кинематическая модель представлена совокупностью подвижных звеньев и их сопряжений в виде двухзвенного механизма (рис. 1). Настройка блоков модели выполнялась с учетом антропометрических параметров участника эксперимента [1].
На первом этапе исследований на входы модели подавались угловые перемещения, скорость, ускорение, полученные с помощью датчиков при выполнении участником эксперимента перемещения локтя (рис. 2а). На выходе модели рассчитывался необходимый момент (рис. 2б) для совершения такого движения.
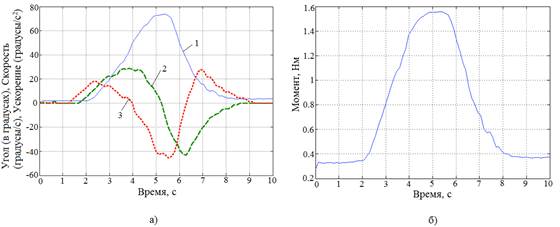
Рис. 2. Входные сигналы и расчетный момент, обеспечивающий заданные параметры движения: а) 1 – угловое перемещение, 2 – скорость, 3 – ускорение; б) расчетный момент в локтевом суставе
Для проверки адекватности модели необходимо решить прямую задачу динамики, т.е. подать на вход модели вращающий момент, а на выходе получить угол поворота локтевого сустава, его скорость и ускорение, а затем сравнить с экспериментальными данными, полученными с помощью пассивного экзоскелета [2].
Анализ результатов моделирования показал, что использованная модель (4) не учитывает демпфирование и жесткость (податливость), присутствующие в костно-мышечной системе, осуществляющей движение локтя. Одна из моделей, которая учитывает такие свойства мышц, это модель Хилла [8].
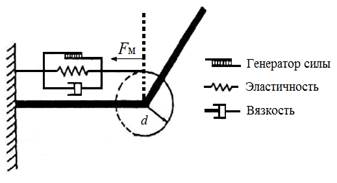
Рис. 3. Эквивалентная схема верхней конечности:
Fм - сила, развиваемая мышцами; d - расстояние от локтя до точки крепления мышц
Скорректируем математическую модель (4), добавив в нее эластичность и вязкость мышц. Эквивалентная схема с учетом эластичности и вязкости приведена на рис. 3.
С учетом модели Хилла динамику движения локтя можно описать следующим уравнением
Значение инерционности I определяется по антропометрическим таблицам [1]. Чтобы определить B и K для каждого испытуемого, были решены задачи идентификации параметров модели.
В таблице 2 приведены значения коэффициентов B и K, а также среднеарифметическое значение (error), среднеквадратическое отклонение (СКО) разницы рассчитанного угла поворота локтя по модели (5) и угла поворота, определенного гироскопом.
Таблица 2
Средняя арифметическая ошибка и стандартное отклонение угла поворота при идентификации параметров B и K
|
Испытуемый |
И1 |
И2 |
И3 |
И4 |
И5 |
|
B (Нмс/рад) |
0.0448 |
0.0509 |
0.0589 |
0.0342 |
0.0968 |
|
K (Нм/рад) |
0.0042 |
0.0040 |
0.0041 |
0.0066 |
0.0084 |
|
error/CKO (градусы) |
1,6921/ 0.3943 |
1,711/ 0.4289 |
1,827/ 0.4012 |
1.657/ 0.3789 |
1.853/ 0.3634 |
В эксперименте принимали участие 5 человек, которые совершали каждый по 10 движений локтем (сгибание – разгибание локтя) в диапазоне 0-120° с разными скоростями. Для оценки соответствия математической модели реальной «приводной системе» человека было проведено сравнение фазовых координат модели – угол поворота и скорость перемещения со значениями, полученными в эксперименте.
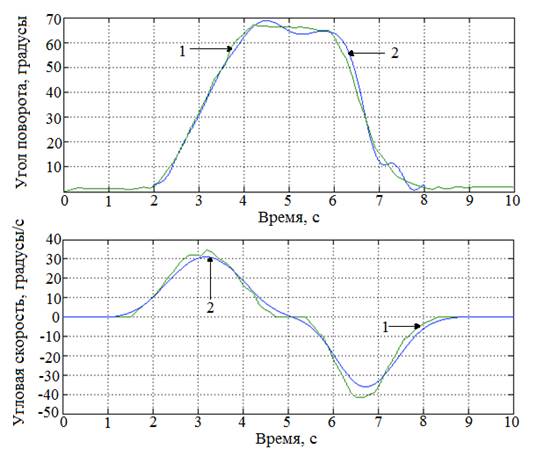
Рис. 4. Результаты моделирование движения локтя: 1) угловое перемещение и скорость, измеренные гироскопом; 2) угловое перемещение и скорость, полученные моделированием
На рис. 4 приведены результаты моделирования и натурного эксперимента для испытуемого И2 со следующими антропометрическими данными: возраст 24 года, рост 172 см, вес 73 кг, длина плеча 31 см, длина предплечья и кисть 35 см. Ошибки по углу, скорости составили 2,09; 4,278 процентов соответственно.
Такие ошибки для модели движения биологической системы можно считать допустимыми, следовательно разработанную модель возможно использовать при проектировании исполнительных приводных систем, эквивалентных руке человека.
Рецензент:
Омельченко В.П., д.б.н., профессор, зав. кафедрой «Медицинская и биологическая физика», ГБОУ ВПО «Ростовский государственный медицинский университет» Минздрава РФ, г. Ростов-на-Дону;
Димитров В.П., д.т.н., профессор, зав. кафедрой «Управление качеством», Донской государственный технический университет, г. Ростов-на-Дону.
Библиографическая ссылка
Бонилья Ф.В., Лукьянов Е.А., Литвин А.В., Деплов Д.А. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ДИНАМИКИ ДВИЖЕНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/ru/article/view?id=18929 (дата обращения: 01.07.2026).