



При движении транспортных средств по автомагистрали возникает противоречие между стремлением водителя двигаться с желаемой скоростью и условиями движения, которое разрешается установкой ограничений на скорость движения. Скорость движения является ключевым фактором, непосредственно воздействующим на определенные характеристики автомагистрали, такие как транспортно-эксплуатационные свойства, безопасность движения и состояние окружающей среды. Установка фиксированных ограничений скорости достаточно проста в реализации, однако не позволяет своевременно учитывать изменения характеристик транспортного потока и состояния проезжей части, обусловленных погодно-климатическими факторами. Стремление адаптировать скорость транспортного потока к изменению условий движения привело в последнее время к развитию методов переменных ограничений скорости (variable speed limits – VSL).
Методы переменного ограничения скорости
В работе [3] можно найти достаточно подробную классификацию VSL–систем и оценки эффективности их применения, полученные как на основе имитационного моделирования, так и полевых испытаний. Среди VSL–системы выделяются на два основных типа – системы, устанавливающие ограничения скорости по расписанию (Scheduled Variable Speed Limits – SVSL) и динамически определяющие вводимые ограничения (Dynamic Speed Limits – DSL).
SVSL-системы устанавливают сезонные или временные (на основании предустановленного расписания) ограничения скорости. Сезонные ограничения скорости применяются к определенному типу дороги и устанавливают ограничения скорости в течение специфических периодов (в общем случае зимние/летние ограничения скорости). Примеры использования подобных систем можно найти в странах c холодным климатом и устанавливающие ограничения скорости из-за экстремальных метеорологических условий в течение зимних месяцев [6, 9, 15]. Почасовые ограничения скорости главным образом применяются для предотвращения или уменьшения определенных негативных воздействий на отдельном участке автомагистрали или городской улице в специфические периоды. Реализацию VSL в зонах школ можно найти в работе [13], а исследования, связанные со снижением шума в вечерние часы в жилых зонах, вблизи больниц или других объектов в работе [6].
Динамическое ограничение скорости подразумевает изменения в устанавливаемых ограничениях в зависимости от условий движения. В этой связи DSL часто определяется как составная часть интеллектуальной транспортной системы (Intelligent Transport System – ITS), которая вызывает изменения в ограничениях скорости в зависимости текущей информации относительно дороги, условий движения, метеорологических условий и/или условий окружающей среды [14]. На практике система состоит из знаков переменной информации (dynamic message signs – DMS), установленных вдоль дороги и связанных через систему связи с центром организации дорожного движения. После обработки данных и вычисления ограничений скорости, обновленная информация выводится на DMS. Накладываемые ограничения на скорость движения, как правило, носят принудительный характер, хотя известны системы с рекомендуемыми ограничениями скорости [8].
Исследования применения DSL показали сокращение количества смен полос движения на 50% [8] при более равномерном распределении потока по полосам движения. Эффект заключается в снижении как средней скорости, так и вариации скоростей в транспортном потоке, что благоприятно сказывается на пропускную способность автомагистрали и безопасность движения. Так анализ данных дорожно-транспортных происшествий [2, 10, 11] показал снижение числа дорожно-транспортных происшествий на 10-30% при использовании DSL.
Повышение равномерности движения благоприятно сказывается на пропускной способности автомагистралей. Исследования [2, 4, 11] показали повышение пропускной способности дороги от 2% до 10% за счет снижения частоты появления и размеров ударных волн, приводящих к перенасыщению транспортного потока. Следует отметить негативные эффекты использования DSL, возникающие на участках въездов на автомагистраль при высокой плотности движения. Увеличение интенсивности движения на крайней полосе приводит к уменьшению интервалов между автомобилями в потоке, усложняя процесс слияния и тем самым создавая перенасыщение на въезде [5].
Установка ограничений скорости в зависимости от метеорологических условий и состояния транспортного потока
Выбор оптимального режима движения производиться с учетом оценки условий движения, включающие в себя геометрические параметры, транспортно-эксплуатационные характеристики дорог, состояние инженерного оборудования, параметры транспортного потока и метеорологические условия. Концептуально различаются два метода установки ограничений скорости движения. Первый заключается в установке ограничений скорости движения на основе статистических наблюдений за скоростями транспортного потока и установке ограничений на уровне 85% обеспеченности. Второй, аналитический, метод состоит в определении допустимой скорости движения, исходя из теоретических моделей взаимодействия автомобиля с дорогой и его движения в транспортном потоке. Аналитический способ более универсальный и позволяет учитывать разнообразные факторы при установке ограничений, однако требует тщательного выбора модели транспортного потока.
Наиболее востребованной в настоящее время макроскопической моделью является METANET [12]. В модели каждая связь mÎMnet разделена на сегменты длиной Lm (рисунок 1), причем для всех сегментов определены одинаковые характеристики, такие как число полос движения n, пропускная способность и т.д.
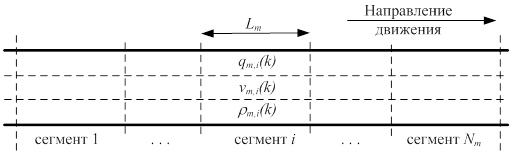
Рис. 1. Фрагмент транспортной сети METANET
Состояние транспортного потока в каждом сегменте, i связи m во время k описывается макроскопическими переменными – плотностью rm,i(k), скоростью vm,i(k) и интенсивностью qm,i(k) транспортного потока.
Величина шага моделирования T и длина сегмента Lm выбираются из следующих соображений: за один шаг моделирования транспортное средство, находящееся в ячейке i-1 и движущееся с максимальной скоростью, не может переместиться в ячейку i+1; шаг моделирования не должен превышать шага управления светофорным объектом.
Интенсивность движения (или отток) из сегмента i связи m во временном шаге k будет определяться следующим образом:
![]() , (1)
, (1)
где nm – число полос на связи m.
Плотность транспортного потока определяется в форме закона сохранения автомобилей на транспортной связи:
![]() . (2)
. (2)
Скорость транспортного потока на шаге моделирования k+1 вычисляется как:
 (3)
(3)
где t – коэффициент, представляющий временную задержку реакции водителя на восприятие плотности потока; V(rm,i(k)) – желаемая скорость; u – коэффициент пропорциональности; κ - параметр модели, введённый с целью обеспечить работу модели при средней и высокой плотности и исключить сингулярности (или неадекватного поведений модели) при низкой плотности потока, κ > 0.
Желаемая скорость движения определяется из основной диаграммы транспортного потока по следующей формуле:
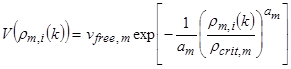 , (4)
, (4)
где vfree,m – скорость свободного движения на связи m; rcrit,m – критической плотности на этой связи, am – параметр модели.
Обратим внимание, что формулы (1-3) определяют текущее состояние сегмента транспортной сети, а формула (4) – форму основной диаграммы транспортного потока. Учет совместного влияния характеристик транспортного потока и погодных условий возможен путем модификации значений vfree,m.
Для оценки совместного влияния параметров состояния дороги и метеорологических условий движения на режим движения автомобилей А.П. Васильевым [1] предложен метод, который заключается в сравнении безопасной скорости движения в данных условиях vф с максимальной безопасной скоростью в эталонных условиях vэ. Отношение указанных скоростей получило название коэффициента обеспечения расчетной скорости Kр.с.. Допустимая скорость движения при воздействии двух и более факторов определяется по следующей формуле:
![]() . (5)
. (5)
где Kрс Xn – частный коэффициент обеспечения расчетной скорости для фактора Xn; f( ) – функция связи между частными коэффициентами обеспечения расчетной скорости.
В простейшем случае функция f( ) описывается мультипликативной моделью:
 . (6)
. (6)
Формула (6) предполагает полную симметрию факторов, чего не наблюдается при совместном влиянии метеорологических явлений. В работе [1] приводится пример, когда при высокой температуре воздуха выпадение небольшого дождя может улучшить условия движения, а при температуре около 00С существенно ухудшает их. Совместное влияние различных метеорологических факторов определяется следующим образом:
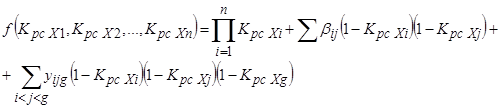 (7)
(7)
где bij и yijg – коэффициенты парного и тройного взаимодействия.
Значения коэффициентов bij и yijg определяются отдельно для факторов, возможных при положительных и отрицательных температурах воздуха [1].
Продемонстрируем использование модели транспортного потока (1-4) совместно с формулами (5, 7). В работе [14] можно найти следующие значения параметров модели METANET: vfree,m =106 км/ч; rcrit,m=33,5 авт/км/пол.; t =18 с; u = 65км2/ч; κ=40 авт/км/пол; am=1,867. Изменение скорости и интенсивности движения от плотности транспортного потока при установке ограничений скорости до 80 и 60 км/ч приведены на рисунках 2 и 3.
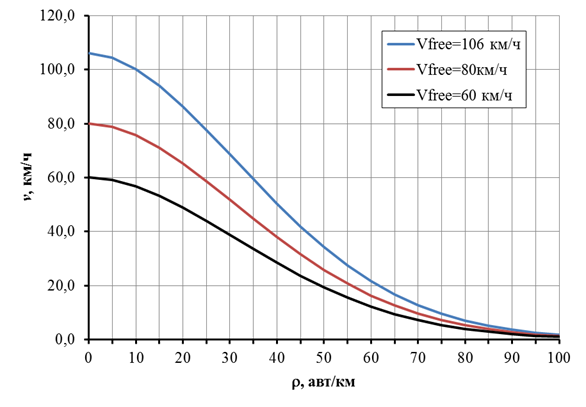
Рис. 2. Зависимость скорости движения от плотности транспортного потока

Рис. 3. Зависимость интенсивности движения от плотности транспортного потока
Заключение
Представленный метод позволяет устанавливать ограничения скорости движения транспортных средств по автомагистрали с учетом влияния метеорологических факторов и текущего состояния транспортного потока. Следует отметить, что наложение ограничений на скорость движения существенно снижает пропускную способность автомагистрали. Это требует принятия мер как по ступенчатому ограничению скорости на подходе к участку с неблагоприятными условиями движения, так и ограничению количества въезжающих транспортных средств на автомагистраль с целью недопущения образования заторов.
Рецензенты:
Родионов Ю.В., д.т.н., профессор кафедры эксплуатации автомобильного транспорта ФГБОУ ВПО «Пензенский государственный университет архитектуры и строительства», г. Пенза;
Бажанов А.П., д.т.н., профессор кафедры геотехники и дорожного строительства ФГБОУ ВПО «Пензенский государственный университет архитектуры и строительства», г. Пенза.
Библиографическая ссылка
Горелов А.М., Власов А.А., Гаврина М.А. ДИНАМИЧЕСКОЕ ОГРАНИЧЕНИЕ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ НА АВТОМАГИСТРАЛЯХ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/ru/article/view?id=18048 (дата обращения: 02.08.2026).