



Целью экспериментального исследования являлось определение реальных коэффициентов приведения автомобилей при движении на пересечении или примыкании.
Для определения коэффициентов приведения на пересечении или примыкании в ходе эксперимента регистрировался временной интервал между моментом прохождения последовательными автомобилями линии пересечения.
Полученные данные группировались по выбранным категориям автомобилей: легковые, грузовые категории ![]() , грузовые категории
, грузовые категории ![]() , автопоезда категории
, автопоезда категории ![]() , автобусы
, автобусы ![]() . С целью получения более достоверных результатов, значения интервалов первых трех пар автомобилей в пачке не учитывались, так как поток насыщения в этом случае еще не является установившемся.
. С целью получения более достоверных результатов, значения интервалов первых трех пар автомобилей в пачке не учитывались, так как поток насыщения в этом случае еще не является установившемся.
Как показала статистическая обработка данных по каждой категории автомобилей, распределение временных интервалов между автомобилями при рассасывании очереди на примыканиях и пересечениях подчиняется нормальному закону. Параметры законов распределения для каждой категории автомобилей представлены в таблице 1, при этом приняты следующие обозначения:
![]() – среднее квадратическое отклонение интервала, с;
– среднее квадратическое отклонение интервала, с;
![]() – вероятность согласования теоретического и статистического распределения.
– вероятность согласования теоретического и статистического распределения.
Таблица 1
Параметры законов распределения интервалов между автомобилями
|
Категория автомобиля |
Интервал, с |
|
|
|
|
Легковой |
|
1,9±0,7 |
0,38 |
0,71 |
|
Грузовой |
|
3,1±1,1 |
0,58 |
0,86 |
|
Грузовой |
|
3,6±1,5 |
0,74 |
0,9 |
|
Автопоезд |
|
3,7±1,7 |
0,88 |
0,52 |
|
Автопоезд |
|
4,4±1,7 |
0,87 |
0,78 |
|
Автобус |
|
3,7±1,9 |
0,94 |
0,91 |
Выравнивание статистических рядов проводилось при условии сохранения математического ожидания и дисперсии. Оценка согласованности теоретического и статистического распределений интервалов между автомобилями выполнялось по критерию А.А. Колмогорова. Гистограммы и выравнивающие кривые распределений интервалов между автомобилями определенных категорий показаны на рисунках 1-7.
Коэффициент приведения данной категории к легковому автомобилю определяется, в случае движения на пересечении или примыкании, по формуле
 (3.24)
(3.24)
где ![]() – математическое ожидание временного интервала между автомобилями данной категории, с;
– математическое ожидание временного интервала между автомобилями данной категории, с;
![]() – математическое ожидание временного интервала между легковыми автомобилями, с.
– математическое ожидание временного интервала между легковыми автомобилями, с.
Значения коэффициентов приведения, полученные путем обработки результатов экспериментальных исследований представлены в таблице 2.
Таблица 2
Значения коэффициентов приведения автомобилей при движении через пересечения
|
Категория автомобиля |
Коэффициент приведения |
|
|
Грузовой |
|
1,6 |
|
Грузовой |
|
1,8 |
|
Автопоезд |
|
2,0 |
|
Автопоезд |
|
2,3 |
|
Автобус |
|
2,0 |
Анализ имеющихся публикаций, теоретическое и экспериментальные исследования вопроса приведения смешанного транспортного потока к условному «эквивалентному» потоку легковых автомобилей, выполнение в рамках данного исследования, показывают, что он является значительно более сложным, чем это может показаться на первый взгляд.
Нужно отметить, что углубление в этот вопрос позволяет, прежде всего, отметить необходимость использования понятия эквивалентного (приведенного) потока, в чем некоторыми специалистами вообще выражается сомнение.
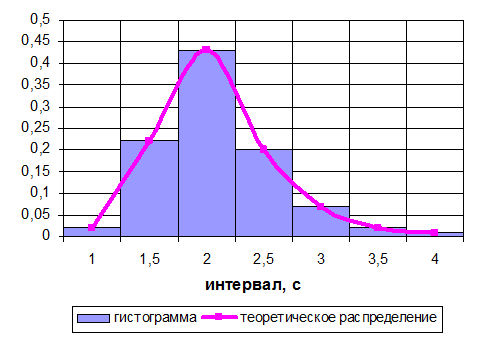
Рисунок 1. Распределение интервалов между легковыми автомобилями: 1- гистограмма; 2 – теоретическое распределение
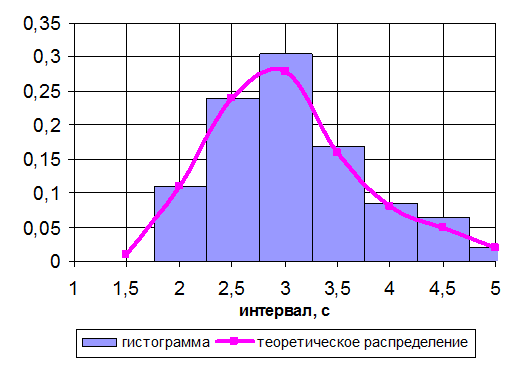
Рисунок 2. Распределение интервалов между грузовыми автомобилями (ЗИЛ-130) ![]() : 1 – гистограмма; 2 – теоретическое распределение
: 1 – гистограмма; 2 – теоретическое распределение
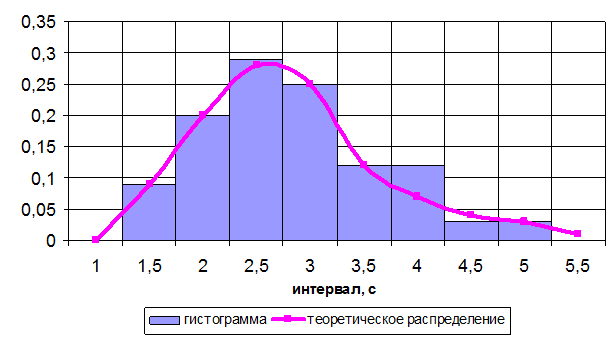
Рисунок 3. Распределение интервалов между грузовыми автомобилями (МАЗ, КРАЗ) категории ![]() : 1 – гистограмма; 2 – теоретическое распределение
: 1 – гистограмма; 2 – теоретическое распределение
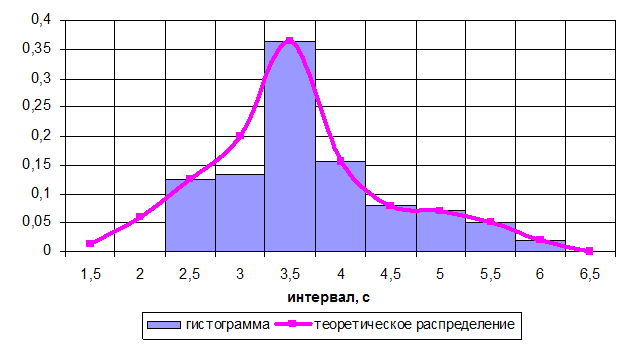
Рисунок 4. Распределение интервалов между автопоездами категории ![]() : 1 – гистограмма; 2 – теоретическое распределение
: 1 – гистограмма; 2 – теоретическое распределение
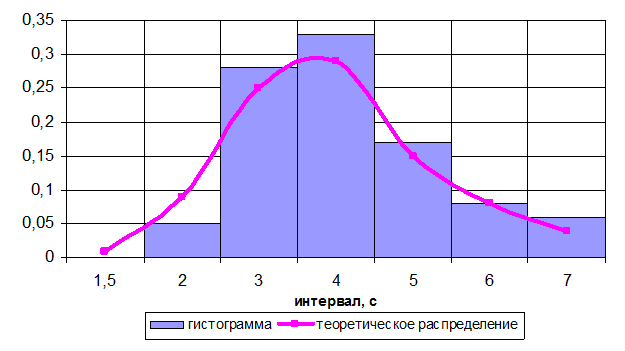
Рисунок 5. Распределение интервалов между автопоездами категории ![]() : 1 – гистограмма; 2 – теоретическое распределение
: 1 – гистограмма; 2 – теоретическое распределение
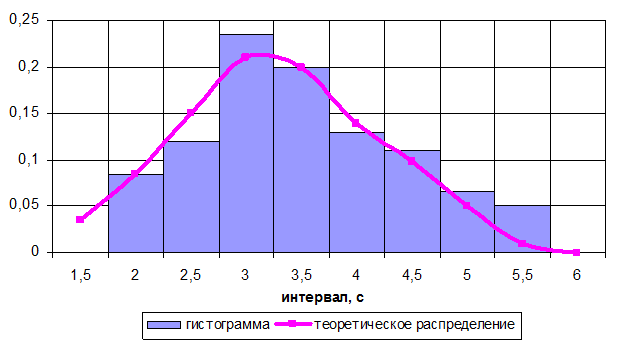
Рисунок 6. Распределение интервалов между автобусами категории ![]() : 1 – гистограмма; 2 – теоретическое распределение
: 1 – гистограмма; 2 – теоретическое распределение
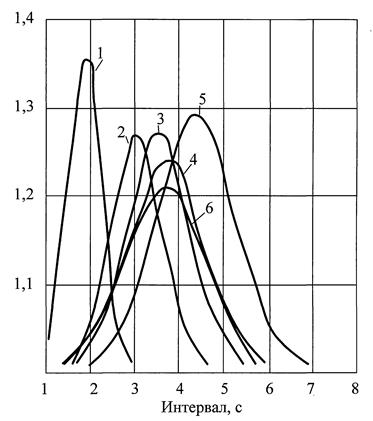
Рисунок 7. Распределение интервалов между автомобилями (1 – легковые; 2 – грузовые категории ![]() ; 3 – грузовые категории
; 3 – грузовые категории ![]() ; 4 – автопоезда категории
; 4 – автопоезда категории ![]() ; 5 – автопоезда категории
; 5 – автопоезда категории ![]() ; 6 – автобусы категории
; 6 – автобусы категории ![]() )
)
Задача состоит в том, чтобы определить, какой участок дороги занимает то или иное транспортное средство при движении с определенной установившейся скоростью, или каков динамический габарит автомобиля, определяющий наибольшую допустимую (по условию безопасности) плотность потока при максимальной интенсивности соответствующей пропускной способности полосы движения.
Рассматриваемый вопрос представляет интерес, прежде всего, при решении задач определения пропускной способности на магистралях. Сложность заключается, прежде всего, в том, что на величину фактического динамического габарита ![]() оказывает влияние большее число субъективных и объективных факторов и их сочетание создает широкий спектр конкретных значений
оказывает влияние большее число субъективных и объективных факторов и их сочетание создает широкий спектр конкретных значений ![]() , которые и выявились при натурных исследованиях. Даже теоретические исследования показывают, что величина
, которые и выявились при натурных исследованиях. Даже теоретические исследования показывают, что величина ![]() для данного автомобиля, например, ЗИЛ-130, если его рассчитать с учетом наиболее существенных факторов, не может быть выражена однозначно, а должна представлять собой набор характеристик. Если отбросить также субъективные факторы как время реакции конкретного водителя (точнее его субъективную оценку своего времени реакции), точность оценки расстояния, тормозных свойств своего автомобиля и вероятностной оценки необходимости экстренного торможения, можно указать, прежде всего, на два главных объективных фактора, определяющих расчетную величину дистанции безопасности (
для данного автомобиля, например, ЗИЛ-130, если его рассчитать с учетом наиболее существенных факторов, не может быть выражена однозначно, а должна представлять собой набор характеристик. Если отбросить также субъективные факторы как время реакции конкретного водителя (точнее его субъективную оценку своего времени реакции), точность оценки расстояния, тормозных свойств своего автомобиля и вероятностной оценки необходимости экстренного торможения, можно указать, прежде всего, на два главных объективных фактора, определяющих расчетную величину дистанции безопасности (![]() ):
):
- тип и тормозная характеристика движущегося впереди автомобиля (то есть «лидера»);
- степень загрузки лидера (если это грузовой автомобиль).
Так как тормозная динамика при этом заметно изменяется. Так если груженый ЗИЛ-4331 следует за таким же автомобилем, то при скорости 60 км/ч достаточно дистанция около 29 м (динамический габарит 36 м). Если же ЗИЛ-4331 следует за легковым автомобилем типа Lada Granta, то дистанция должна быть увеличена до 41 м (динамический габарит 40 м), соответственно изменяется почти на 30 %.
Очевидно, что оперировать в практических задачах набором коэффициентов приведения для одного типа автомобиля (в зависимости от того за каким и в каком состоянии по нагрузке он следует) бесперспективно. Поэтому следует остановиться на усредненных коэффициентах, причем рассматриваемая на «худший» вариант по сочетании лидера и ведомого, а именно случая , когда груженный грузовой автомобиль следует за легковым.
Из факторов, объективно влияющих на ![]() , первостепенное значение имеет тормозная динамика. В связи с этим определение следует унифицировать с нормами тормозной динамики, а не разделять просто по величине грузоподъёмности, как это сделано в СНИП-60-75 и других нормативных документах. Следует также заметить, что при натурных наблюдениях разделение по грузоподъёмности всех автомобилей сложно (а по степени нагруженности иногда и невозможно). А так как, прежде всего, приходится применять при обработке натурных наблюдений за транспортным потоком, это является дополнительным аргументом за то, что
, первостепенное значение имеет тормозная динамика. В связи с этим определение следует унифицировать с нормами тормозной динамики, а не разделять просто по величине грузоподъёмности, как это сделано в СНИП-60-75 и других нормативных документах. Следует также заметить, что при натурных наблюдениях разделение по грузоподъёмности всех автомобилей сложно (а по степени нагруженности иногда и невозможно). А так как, прежде всего, приходится применять при обработке натурных наблюдений за транспортным потоком, это является дополнительным аргументом за то, что ![]() следует назначать по группам автомобилей, а не для каждой модели, хотя теоретические расчеты позволяют назвать конкретные цифры для каждой модели автомобиля и его модификаций в составе автопоезда.
следует назначать по группам автомобилей, а не для каждой модели, хотя теоретические расчеты позволяют назвать конкретные цифры для каждой модели автомобиля и его модификаций в составе автопоезда.
Резюмируя результаты работы надо отметить одну из главных трудностей при проведении натурных наблюдений – это случайный процесс формирования смешанного транспортного потока и практическую невозможность наблюдать поток из одних марок ЗИЛ, МАЗ и т.д. В связи с этим, в натурных экспериментах приходилось обращаться к выборке соответствующих пар автомобилей из потока. Некоторые модели автомобилей, например КРАЗ, на лесовозных дорогах встречаются редко.
Полученные расчетные (теоретические) значения ![]() и фактические наблюдаемые величины расходятся незначительно.
и фактические наблюдаемые величины расходятся незначительно.
Здесь следует отметить, что для грузовых автомобилей в значительно меньшей мере проявляется тенденция водителей, по мере роста интенсивности и скорости, занижать величину дистанции. Видимо это следует объяснить, во-первых, спецификой ходовых качеств и пневматического привода тормозов, не позволяющих водителем чувствовать себя столь уверенно в плотном транспортном потоке. Вероятно, сказывается и большая общая профессиональная осторожность водителей грузовых автомобилей.
Учитывая, что наиболее значимыми объективными факторами, влияющими на эквивалентный показатель (коэффициент приведения) являются габариты, тормозная и тяговая динамика транспортного средства, целесообразно нормирование этих коэффициентов приведения унифицировать с отечественными и международными нормативными документами, определяющими эффективность торможения и других параметров технического состояния и соответствующую классификацию по категориям (![]() ), в частности с соответствующим проектом ГОСТ.
), в частности с соответствующим проектом ГОСТ.
Для расчетов по организации дорожного движения необходимо ориентироваться на характеристики транспортного потока, соответствующие пропускной способности полосы движения и поэтому определять значения применительно к скоростному режиму (50 км/ч).
Рецензенты:
Яковлев К.А., д.т.н., доцент кафедры производства, ремонта и эксплуатации машин ФГБОУ ВПО «Воронежская государственная лесотехническая академия», г. Воронеж;
Кондрашова Е.В., д.т.н., профессор кафедры технического сервиса и технологии машиностроения ФГБОУ ВПО «Воронежский государственный аграрный университет имени императора Петра I», г. Воронеж.
Библиографическая ссылка
Дорохин С.В., Скрыпников А.В., Смирнов М.Ю. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ КОЭФФИЦИЕНТА ПРИВЕДЕНИЯ НА ПЕРЕСЕЧЕНИЯХ И ПРИМЫКАНИЯХ ЛЕСОВОЗНЫХ АВТОМОБИЛЬНЫХ ДОРОГ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/ru/article/view?id=17794 (дата обращения: 13.07.2026).