



Анализ и синтез сложных систем непосредственно связан с решением известных прямых и обратных задач. В прямой задаче предполагается определение с помощью операторного уравнения выходной координаты по известному возмущению, известным характеристикам помехи, оператору системы или ее звеньев (рис.1):
![]() ;
;
![]() – управляющий сигнал,
– управляющий сигнал, ![]() – выходная координата (реакция на управляющий сигнал),
– выходная координата (реакция на управляющий сигнал), ![]() – оператор объекта управления.
– оператор объекта управления.
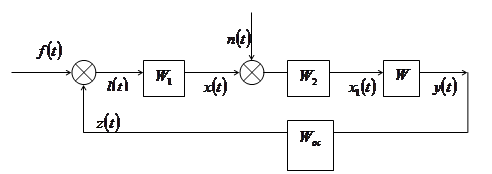
Рис.1. Система с возмущениями и помехами
С учетом взаимодействия управляющего сигнала и помехи:
![]() .
.
Так что
![]() .
.
В системах с обратной связью управляющий сигнал ![]() формируется по сигналу обратной связи
формируется по сигналу обратной связи ![]() и возмущению
и возмущению ![]() , действующему на входе системы:
, действующему на входе системы:
![]() .
.
Таким образом, здесь
![]() .
.
Две обратные задачи связаны с использованием реализации случайных процессов системы, регистрируемых в режиме ее функционирования. В первой задаче определяется оператор системы; она известна как задача идентификации. Вторая обратная задача связана с отысканием статистических характеристик внешних возмущений ![]() , действующих на систему, внутренних помех
, действующих на систему, внутренних помех ![]() и мест их локализации (идентификация возмущений и помех). К сожалению, одновременное решение этих двух задач невозможно [1,2, 3, 5].
и мест их локализации (идентификация возмущений и помех). К сожалению, одновременное решение этих двух задач невозможно [1,2, 3, 5].
Так, идентификация динамических характеристик может производиться лишь при наличии экспериментальных данных о сигналах и априорных сведений о внутренних помехах (необходимы в случаях, когда они коррелированы с внешними возмущениями). Во многих случаях данные о помехах могут быть получены априори только в режиме отладки систем при отсутствии внешних возмущений. Поэтому полученные в результате идентификации динамические характеристики системы могут отличаться от тех, которые соответствуют режиму функционирования системы.
При решении задачи идентификации помех необходимо иметь экспериментальные данные и знать динамические характеристики системы или ее звеньев. Очевидна необходимость использования метода итераций. Что касается методических вопросов идентификации возмущений и помех, действующих в сложных многомерных системах, в том числе с перекрестными связями, то удовлетворительного решения на сегодня нет.
Описание систем в частотной области оказывается более удобным и экономичным, особенно для стационарных систем. Здесь динамические характеристики и взаимная спектральная плотность не зависят от времени и возможно определение частотной характеристики идентифицированной системы по известным спектральным плотностям:
![]() .
.
Однако при идентификации динамической системы, функционирующей задолго до момента анализа ![]() (накопление энергии к моменту
(накопление энергии к моменту ![]() ), возможно получение больших ошибок, связанных с влиянием погрешностей вычисления корреляционных функций, а затем и спектральных плотностей.
), возможно получение больших ошибок, связанных с влиянием погрешностей вычисления корреляционных функций, а затем и спектральных плотностей.
Основная сложность в решении уравнения идентификации связана с некорректностью задачи (даже при вычислении корреляционных функций и спектральных плотностей с высокой степенью точности). Действительно, импульсная переходная функция
 .
.
При ошибке![]() вычисления взаимной корреляционной функции
вычисления взаимной корреляционной функции ![]() спектральная плотность также будет вычислена с ошибкой
спектральная плотность также будет вычислена с ошибкой ![]() . Вместо истинной импульсной переходной функции получим ее оценку
. Вместо истинной импульсной переходной функции получим ее оценку
 ;
;
норма ошибки
 .
.
Как видим, норма ошибки может быть как угодно большой в зависимости от распределения спектральной плотности ![]() . Задача идентификации является не корректной. Для классически корректно поставленной задачи произвольно бесконечно малым возмущениям исходных данных должны соответствовать бесконечно малые возмущения решения. Если
. Задача идентификации является не корректной. Для классически корректно поставленной задачи произвольно бесконечно малым возмущениям исходных данных должны соответствовать бесконечно малые возмущения решения. Если ![]() и
и ![]() имеют нули одинаковой кратности в какой-либо конечной точке оси
имеют нули одинаковой кратности в какой-либо конечной точке оси ![]() , то погрешность решения также может быть значительной. К сожалению, решение уравнения идентификации в частотной области принципиально возможно лишь для непрерывно и длительно функционирующих систем со стационарными или стационаризируемыми (нестационарные сигналы, корреляционные функции которых определяются двойным усреднением: сначала – по времени определяется
, то погрешность решения также может быть значительной. К сожалению, решение уравнения идентификации в частотной области принципиально возможно лишь для непрерывно и длительно функционирующих систем со стационарными или стационаризируемыми (нестационарные сигналы, корреляционные функции которых определяются двойным усреднением: сначала – по времени определяется ![]() , а затем – по ансамблю
, а затем – по ансамблю ![]() ) входными сигналами. Даже в этом случае возникают трудности из-за плохой обусловленности решения и связанной с этим некорректностью задачи. Корректность решения, в первую очередь, зависит от распределения спектральной плотности входного сигнала.
) входными сигналами. Даже в этом случае возникают трудности из-за плохой обусловленности решения и связанной с этим некорректностью задачи. Корректность решения, в первую очередь, зависит от распределения спектральной плотности входного сигнала.
Для восстановления идентифицируемых характеристик в случаях, когда начало идентификации совпадает с началом функционирования системы, частотные методы, строго говоря, не применимы (нет возможности перехода к спектральным плотностям).
Для колебательных систем весьма актуально решение уравнения идентификации

для системы, находящейся под воздействием стационарных или стационаризируемых входных сигналов. Известно, корректность решения связана с выполнением условий:
- спектральная плотность![]() должна содержать четные степени
должна содержать четные степени ![]() , если степень числителя
, если степень числителя ![]() меньше степени знаменателя
меньше степени знаменателя ![]() ;
;
- знаменатель ![]() не должен иметь действительных корней и превращаться в нуль, или быть достаточно близок к нему;
не должен иметь действительных корней и превращаться в нуль, или быть достаточно близок к нему;
- числитель ![]() не должен иметь действительных корней;
не должен иметь действительных корней;
- коэффициенты полиномов ![]() и
и ![]() должны быть действительными.
должны быть действительными.
Точность идентификации будет тем больше, чем больше ![]() отличается от нуля при всех действительных
отличается от нуля при всех действительных ![]() в диапазоне исследуемых частот.
в диапазоне исследуемых частот.
При решении ряда задач виброзащиты [6,7] нами использовался приводимый ниже алгоритм решения уравнения идентификации (система на подвижном основании со стационарным или стационаризируемым сигналом; моменты начала идентификации и функционирования совпадают).
1. Определение по экспериментальным данным корреляционной функции входного сигнала ![]() и взаимной корреляционной функции
и взаимной корреляционной функции ![]() .
.
2. Вычисление ![]() .
.
3. Представление ![]() в виде
в виде ![]() ;
;
![]() и
и ![]() – полиномы относительно
– полиномы относительно ![]() , содержащие только четные степени относительно частоты
, содержащие только четные степени относительно частоты ![]() (
(![]() – четная функция).
– четная функция).
4. Определяется частотная характеристика![]() так называемого формирующего фильтра (
так называемого формирующего фильтра (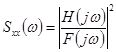 ). Для этого
). Для этого ![]() и
и ![]() разлагаются на множители; отбираются в полученных разложениях множители, соответствующие корням, расположенным в верхней полуплоскости комплексной переменной
разлагаются на множители; отбираются в полученных разложениях множители, соответствующие корням, расположенным в верхней полуплоскости комплексной переменной ![]() , добавляются к таким множителям
, добавляются к таким множителям ![]() (
(![]() – коэффициент при
– коэффициент при ![]() в разложении полинома
в разложении полинома ![]() ) и
) и ![]() (
(![]() – коэффициент при
– коэффициент при ![]() в разложении полинома
в разложении полинома ![]() ).
).
5. Определение спектральной плотности ![]() по корреляционной функции
по корреляционной функции ![]() .
.
6. Наконец, определяется
.
Справедливо:
![]() ,
,
![]() .
.
Предложенный алгоритм прошел положительную апробацию при определении характеристик, как объекта, так и оператора по данным нормального функционирования транспортной эргатической системы [4, 6-9].
Рецензенты:
Родионов Ю.В., д.т.н., профессор, заведующий кафедрой «Эксплуатация автомобильного транспорта», декан автомобильно-дорожного института ПГУАС, г. Пенза;
Кошев А.Н., д.х.н., профессор, профессор кафедры «Информационно-вычислительные системы» Пензенского государственного университета архитектуры и строительства, г. Пенза.
Библиографическая ссылка
Гарькина И.А., Данилов А.М., Тюкалов Д.Е. СЛОЖНЫЕ СИСТЕМЫ: ИДЕНТИФИКАЦИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК, ВОЗМУЩЕНИЙ И ПОМЕХ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/ru/article/view?id=17756 (дата обращения: 01.07.2026).