



При разработке тренажных и обучающих комплексов одной из актуальных задач является количественная оценка оператором устойчивости и управляемости объектом по данным функционирования целостной человеко-машинной (эргатической) системы. Напомним, устойчивость рассматривается, как способность объекта без вмешательства оператора сохранять заданный режим функционирования; а управляемость - должным образом реагировать на отклонение органов управления (для авиационной эргатической системы - рулей высоты, поворота и элеронов). Очевидна связь между равновесием, устойчивостью и управляемостью. Так, в общем случае движение самолета является весьма сложным, поэтому для простоты и удобства анализа на начальном этапе осуществляют декомпозицию (разложение) [2,4] на простейшие виды: продольное и боковое. Ограничимся количественной оценкой указанных характеристик объекта, исходя из параметров продольного движения.
Воспользуемся известными уравнениями [1] движения объекта с системой управления для короткопериодической составляющей:
![]()
![]()
![]()
![]()
![]()
![]()

где
![]()
![]()
Во всех уравнениях, кроме последнего, искомые функции рассматриваются в точке t:
![]()
Для симметрии введем:
![]()
![]()
![]()
![]()
![]()
![]()
(![]() - равенство по определению).
- равенство по определению).
Система приведется к виду:
![]()
![]()
![]()
![]()
![]()

где:
![]()
![]()
Принято:
![]()
![]()
В линейной зоне (![]() ) будем иметь:
) будем иметь:
![]()
![]()
![]()
![]()
![]()
Подставив
![]() ;
; ![]()
окончательно получим систему уравнений короткопериодического движения в виде:
![]()
![]()
![]() (1)
(1)
![]()
![]()
![]()
Для некоторых используемых структурных схем САУ ![]() можно заменить на
можно заменить на ![]() что существенно облегчает исследование вопросов динамики. В этом случае уравнения динамики имеют вид:
что существенно облегчает исследование вопросов динамики. В этом случае уравнения динамики имеют вид:
![]()
![]()
![]()
![]()
![]()
В простейшем случае короткопериодическая составляющая продольного движения описывается системой:
![]()
![]() (2)
(2)
![]()
Для оценки динамических характеристик объекта в [3, 6] предлагается функционал:
 ,(3)
,(3)
![]() - корни характеристического полинома. Для системы второго порядка функционал представится в виде
- корни характеристического полинома. Для системы второго порядка функционал представится в виде
 ,(4)
,(4)
![]() ,
, ![]()
![]() - след матрицы
- след матрицы ![]()
![]() - detA.
- detA.
Выбор весовых коэффициентов нетривиален (связан с определением по данным нормального функционирования корреляционной зависимости между ![]() и
и ![]() ,
, ![]() ).
).
Воспользуемся предложенным функционалом для оценки динамических характеристик объекта с САУ (частный случай (1)):
![]() (5)
(5)
![]()
![]()
![]()
![]() - координаты САУ;
- координаты САУ; ![]() - входные воздействия;
- входные воздействия; ![]() - коэффициенты усиления.
- коэффициенты усиления.
Упростим (5), введя новые переменные
![]()
![]()
и рассматривая ![]() как входной сигнал системы. Получим:
как входной сигнал системы. Получим:
![]()
![]()
![]()
![]() (6)
(6)
![]()
![]()
![]() ,
, ![]() ,
,
![]() .
.
Из 1 и 4-го уравнения следует
 ,
,
Из малости времени регулирования t - t0 значений ![]() следует слабая зависимость
следует слабая зависимость ![]() и
и ![]() от
от ![]() (зависимость от
(зависимость от ![]() отсутствует!). Поэтому
отсутствует!). Поэтому ![]() и
и ![]() можно рассматривать как входные воздействия системы с матрицей
можно рассматривать как входные воздействия системы с матрицей
 .
.
Зависимость от параметров САУ определится по формулам перехода от ![]() к
к ![]() , в частности,
, в частности,
![]()
![]()
С учетом
![]()
влияние САУ на динамические характеристики системы можно оценить по смещению точки (![]() ,
,![]() ) относительно (
) относительно (![]() ,
, ![]() ) на плоскости
) на плоскости ![]() .
.
Множество объектов отнесем к ![]() -му классу в выбранной N-балльной шкале, если удовлетворяется условие
-му классу в выбранной N-балльной шкале, если удовлетворяется условие
![]() .
.
Границы областей ![]() для объектов
для объектов ![]() -го класса определятся значениями
-го класса определятся значениями ![]() , которые представляются в виде двух однозначных ветвей кривой
, которые представляются в виде двух однозначных ветвей кривой
![]()
(![]() ;
; ) функции
) функции ![]() а именно:
а именно:
 .
.
В частности, класс ![]() =3,5 определяется по указанным формулам при
=3,5 определяется по указанным формулам при ![]()
![]() , классу
, классу ![]() =6,5 соответствует значение
=6,5 соответствует значение ![]() (рисунок).
(рисунок).
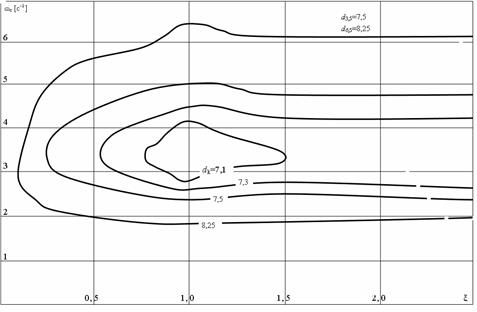
К классификации объектов на плоскости ![]() .
.
Таким образом, свойства системы (6) полностью определяются матрицей ![]() ; а оценку объекта для системы (5) можно производить по оценкам для системы (2). Приведенный подход неоднократно использовался при настройке параметров реальных систем [5,7,8].
; а оценку объекта для системы (5) можно производить по оценкам для системы (2). Приведенный подход неоднократно использовался при настройке параметров реальных систем [5,7,8].
Рецензенты:
Родионов Ю.В., д.т.н., профессор, заведующий кафедрой «Эксплуатация автомобильного транспорта» декан автомобильно-дорожного института ПГУАС, г. Пенза;
Кошев А.Н., д.х.н., профессор, профессор кафедры «Информационно-вычислительные системы» Пензенского государственного университета архитектуры и строительства, г. Пенза.
Библиографическая ссылка
Гарькина И.А., Данилов А.М., Сухов Я.И. КОЛИЧЕСТВЕННАЯ ОЦЕНКА ХАРАКТЕРИСТИК ОБЪЕКТА ПО УПРАВЛЯЕМОСТИ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/ru/article/view?id=17556 (дата обращения: 01.07.2026).