



Развитие электроэнергетики сопровождается усложнением функций устройств релейной защиты и автоматики (УРЗА) электрических сетей и возрастанием требований к точности и надежности их работы. При этом происходит рост парка этих устройств. В связи с этим возрастают требования к производительности и достоверности их технической диагностики. Одной из задач при этом является определение параметра срабатывания (возврата) пусковых органов (ПО) УРЗА. Для обеспечения производительности и достоверности контроля параметра срабатывания ПО в условиях их производства и эксплуатации расширяется применение автоматизированных измерительных средств. Такими средствами являются, в частности, программно-технический измерительный комплекс «РЕТОМ», выпускаемый НПП «Динамика» (г. Чебоксары) и устройство типа «Нептун», выпускаемое ООО «Сириус» (г. Зеленоград).
В известных устройствах автоматизации технического диагностирования ПО измерение осуществляется путем ступенчатого изменения входного тока ПО с шагом дискретности, определяемым точностью измерения, начиная от некоторого начального значения до значения, при котором происходит срабатывание ПО. Это достигнутое значение тока представляет собой за результат измерения. Длительность каждой из ступеней определяется соотношением ![]() где
где ![]() - номинальное время срабатывания ПО, а k- коэффициент запаса, учитывающий зависимость времени срабатывания от шага дискретности изменения тока. Значение k в зависимости от шага дискретности должно выбираться в пределах: 2…5. Так как на каждом дискретном уровне значение тока поддерживается неизменным в течение времени
- номинальное время срабатывания ПО, а k- коэффициент запаса, учитывающий зависимость времени срабатывания от шага дискретности изменения тока. Значение k в зависимости от шага дискретности должно выбираться в пределах: 2…5. Так как на каждом дискретном уровне значение тока поддерживается неизменным в течение времени ![]() , то рассматриваемый режим измерения можно условно назвать «статическим».
, то рассматриваемый режим измерения можно условно назвать «статическим».
Цель исследования
Целью проведенных исследований является анализ эффективности предлагаемого метода измерения параметров срабатывания ПО в динамическом режиме, обеспечивающего более высокую производительность процесса измерения.
Материал и методы исследования
Повышение производительности процесса контроля можно достичь путем измерения в динамическом режиме, когда измеряемое значение параметра входного сигнала ПО нарастает непрерывно со скоростью v до момента срабатывания ПО. В случае, когда входным сигналом ПО является синусоидальный ток, таким параметром является действующее значение этого тока.
За ток срабатывания (I![]() ) ПО в динамическом режиме контроля принимается действующее значение линейно нарастающего по амплитуде синусоидального входного тока, достигаемого в момент срабатывания реле. При этом значение I
) ПО в динамическом режиме контроля принимается действующее значение линейно нарастающего по амплитуде синусоидального входного тока, достигаемого в момент срабатывания реле. При этом значение I![]() отличается от истинного значения тока срабатывания Ic на величину динамической погрешности измерения, равной
отличается от истинного значения тока срабатывания Ic на величину динамической погрешности измерения, равной ![]() . Эта погрешность зависит от значения v и времени задержки срабатывания ПО в динамическом режиме контроля.
. Эта погрешность зависит от значения v и времени задержки срабатывания ПО в динамическом режиме контроля.
В статье приводятся результаты экспериментального исследования зависимости I![]() (v) у электромеханического реле переменного тока типа РТ-40 и микропроцессорного ПО токовой отсеки терминала УРЗА типа 7SI5005 – 5CA01 фирмы SIEMENS. Процесс изменения амплитуды синусоидального входного тока ПО по линейному закону изменения Ic показан на рис.1. На рис.2 и рис.3 показаны результаты проведенных экспериментальных исследований. Из этих результатов видно, что у реле тока типа РТ-40 зависимость I
(v) у электромеханического реле переменного тока типа РТ-40 и микропроцессорного ПО токовой отсеки терминала УРЗА типа 7SI5005 – 5CA01 фирмы SIEMENS. Процесс изменения амплитуды синусоидального входного тока ПО по линейному закону изменения Ic показан на рис.1. На рис.2 и рис.3 показаны результаты проведенных экспериментальных исследований. Из этих результатов видно, что у реле тока типа РТ-40 зависимость I![]() (v) является в большей степени нелинейной функцией, чем у ПО микропроцессорного УРЗА.
(v) является в большей степени нелинейной функцией, чем у ПО микропроцессорного УРЗА.
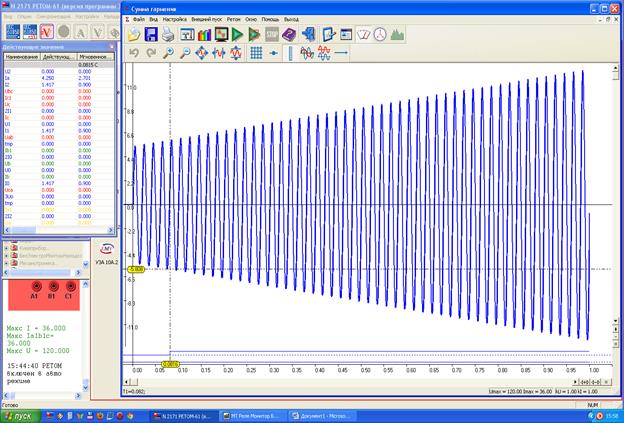
Рис.1. Процесс измерения тока срабатывания реле тока токовой отсечки терминала
фирмы Siemens в «динамическом» режиме контроля (![]()
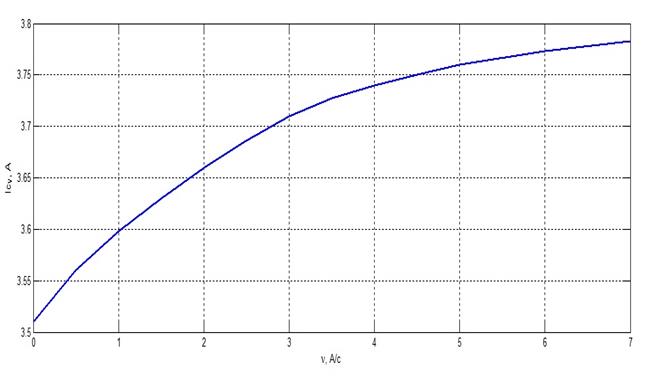
Рис 2. Зависимость ![]() реле тока типа РТ-40. (
реле тока типа РТ-40. (![]()
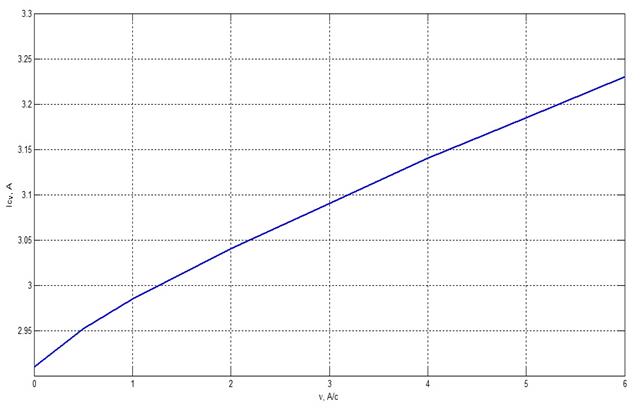
Рис 3. Зависимость ![]()
![]() реле тока токовой отсечки терминала фирмы
реле тока токовой отсечки терминала фирмы
Siemens (![]()
Измерение тока срабатывания ПО в динамическом режиме осуществляется аппроксимацией реальной функции ![]() , некоторой достаточно простой функцией
, некоторой достаточно простой функцией ![]() ПО.
ПО.
Параметры этой функции определяются путем измерения значений I![]() при нескольких значениях v. Количество таких измерений определяется количеством параметров аппроксимирующей функции и применяемым методом аппроксимации. Произведя вычисления параметров функции
при нескольких значениях v. Количество таких измерений определяется количеством параметров аппроксимирующей функции и применяемым методом аппроксимации. Произведя вычисления параметров функции ![]() в автоматическом режиме, за результат измерения параметра срабатывания ПО принимается значение, равное
в автоматическом режиме, за результат измерения параметра срабатывания ПО принимается значение, равное ![]() . При этом возникает динамическая погрешность измерения, равная
. При этом возникает динамическая погрешность измерения, равная ![]() = (I*
= (I*![]() ( v ) - Ic )/ Ic. .
( v ) - Ic )/ Ic. .
Результаты исследования и их обсуждение
Ниже приводятся результаты анализа эффективности измерения в динамическом режиме параметра срабатывания ПО в случае, когда в качестве аппроксимирующей функции выбран линейный интерполянт.
Эффективность метода измерения оценивалась параметром п, определяемым в виде n =![]() tис /
tис / ![]() tид , где
tид , где ![]() tис ,
tис , ![]() tид - длительности процессов измерения параметра срабатывания ПО в статическом и динамическом режимах измерения для случая, когда начальное действующее значение линейно-нарастающего синусоидального тока было принято равным 0,9 Ic . При этом параметры функции
tид - длительности процессов измерения параметра срабатывания ПО в статическом и динамическом режимах измерения для случая, когда начальное действующее значение линейно-нарастающего синусоидального тока было принято равным 0,9 Ic . При этом параметры функции ![]() определялись так, чтобы для каждого заданного значения
определялись так, чтобы для каждого заданного значения ![]() обеспечивалось достижение наименьшего значения
обеспечивалось достижение наименьшего значения ![]() tид. В случае
tид. В случае ![]() = 0,01 это условие обеспечивается при значениях
= 0,01 это условие обеспечивается при значениях ![]() , равных v1 =1,5 и v2 =2,0 для электромеханического ПО (реле РТ-40) и v1 =1,6 и v2 = 3,2 для микропроцессорного ПО. Результаты проведенного анализа приведены на рис.4 и 5.
, равных v1 =1,5 и v2 =2,0 для электромеханического ПО (реле РТ-40) и v1 =1,6 и v2 = 3,2 для микропроцессорного ПО. Результаты проведенного анализа приведены на рис.4 и 5.
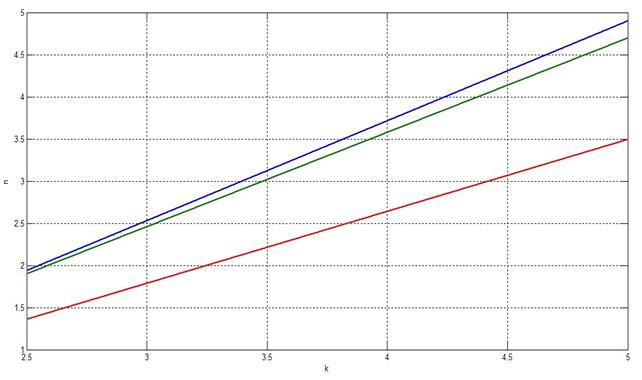
Рис 4. Зависимость n (k) для реле типа РТ-40: 1-![]() =0,01; 2-
=0,01; 2-![]() =0,02; 3-
=0,02; 3-![]() =0,05
=0,05
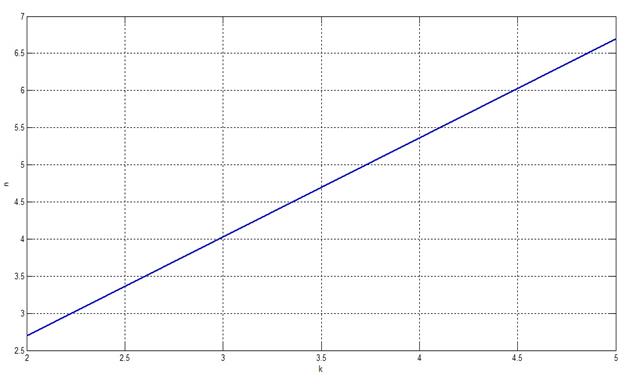
Рис 5. Зависимость n (k) для токового ПО терминала 7SI5005 -5CA01 при ![]() =0,01
=0,01
Из рис. 4 и 5 следует, что применение динамического режима измерения параметра срабатывания ПО позволяет существенно сократить длительность процесса измерения и сравнению со статическим режимом измерения. Эффективность метода при измерении параметра срабатывания микропроцессорного токового ПО выше, чем у электромеханического токового ПО.
Наибольшее значение динамической погрешности измерения для микропроцессорного токового ПО при линейной аппроксимации не превышает значение ![]() = 0,02. Поэтому при динамических погрешностях измерения, превышающих значение
= 0,02. Поэтому при динамических погрешностях измерения, превышающих значение ![]() = 0,02, время измерения может быть уменьшено более, чем на порядок. Для реле тока РТ-40 наибольшее значение динамической погрешности при линейной аппроксимации равна
= 0,02, время измерения может быть уменьшено более, чем на порядок. Для реле тока РТ-40 наибольшее значение динамической погрешности при линейной аппроксимации равна ![]() =0,05.
=0,05.
Выводы
Применение динамического метода измерения параметра срабатывания токовых ПО обеспечивает значительное повышение производительности измерительного процесса. Этот эффект более значителен для ПО с задержкой времени на срабатывание. Эффективность предложенного метода измерений может быть повышена при использовании нелинейной аппроксимирующей функции.
Результаты проведенных исследований могут быть использованы при разработке новых алгоритмов автоматизированного контроля параметров срабатывания ПО УРЗА.
Исследование выполнено при финансовой поддержке РФФИ в рамках научного проекта №14-07-00143
Рецензенты:
Артемьев И.Т., д.ф.-м.н., профессор кафедры математического и аппаратного обеспечения информационных систем, ФГБОУ ВПО «ЧГУ им. И.Н. Ульянова», г. Чебоксары;
Охоткин Г.П., д.т.н., профессор кафедры автоматики и управления в технических системах ФГБОУ ВПО «ЧГУ им. И.Н. Ульянова», г. Чебоксары.
Библиографическая ссылка
Павлова Н.В., Желтов П.В., Григорьев В.Г. АНАЛИЗ ЭФФЕКТИВНОСТИ ИЗМЕРЕНИЯ В ДИНАМИЧЕСКОМ РЕЖИМЕ ПАРАМЕТРА СРАБАТЫВАНИЯ ТОКОВЫХ ПУСКОВЫХ ОРГАНОВ УСТРОЙСТВ ЗАЩИТ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/ru/article/view?id=17210 (дата обращения: 24.07.2026).