



Гидравлическая передача и редуктор часто рассматриваются как альтернатива друг другу в различных случаях применения. Этому, также, посвящено немало работ. Так, например, в работе [1] рассматриваются преимущества и недостатки гидравлической объемной передачи по сравнению с редуктором, анализируются энергетические характеристики и функциональные возможности. Однако, в большинстве случаев сравниваются передачи относительно большой мощности (от нескольких кВт и выше).
В данной статье речь пойдет о передачах, мощность которых не превышает 500 Вт и с жесткими ограничениями по габаритным размерам. Эти требования характерны, например, для робототехники и других отраслей промышленности. Речь идет о применении в приводах манипуляторов и создании малогабаритных автономных роботов. При выборе схемы передачи мощности необходимо руководствоваться функциональными требованиями механизма, а также требованием обеспечения максимальной энергоэффективности, что особенно важно при использовании в автономном устройстве в качестве источника энергии аккумуляторных батарей.
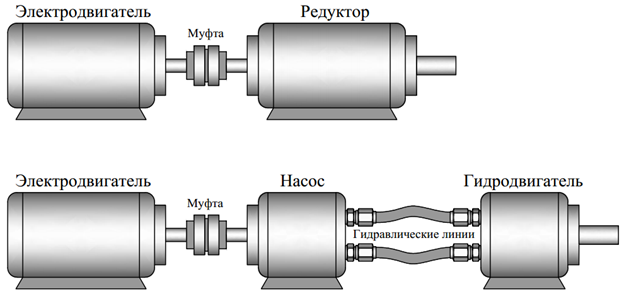
Для проведения сравнительного анализа статье выбран привод, выходной вал которого периодически поворачивается на угол меньше 90° с частотой до 10 Гц. Сравнение проводится для механической передачи, состоящей из индукторного электродвигателя с планетарным редуктором и гидравлической передачи, состоящей их индукторного электродвигателя, насоса и гидродвигателя. В обоих случаях рассматривается один и тот же индукторный электродвигатель EC-4pole 32 фирмы Maxon. Двигатель является одним из передовых в своем классе.
Описание механической передачи
Передача состоит из электродвигателя EC-4pole 32 фирмы Maxon и волнового планетарного редуктора фирмы Harmonic Drive. Стоит отметить, что редукторы такого типа имеют одни из лучших на сегодняшний день массогабаритные и энергетические характеристики.
Для проведения анализа построим зависимость КПД передачи от момента на выходном валу и скорости вращения.
Для построения характеристики электродвигателя воспользуемся методикой, описанной в [2].
Зависимость скорости вращения двигателя от подаваемого напряжения и момента на выходном валу имеет следующий вид:
![]() (1)
(1)
где: ![]() –
скорость вращения вала электродвигателя,
–
скорость вращения вала электродвигателя,
![]() –
напряжение, подаваемое на электродвигатель,
–
напряжение, подаваемое на электродвигатель,
![]() –
момент на валу электродвигателя,
–
момент на валу электродвигателя,
![]() –
коэффициент наклона характеристики по напряжению (скоростная постоянная),
–
коэффициент наклона характеристики по напряжению (скоростная постоянная),
![]() –
коэффициент наклона характеристики по моменту.
–
коэффициент наклона характеристики по моменту.
КПД двигателя определим как:
![]() (2)
(2)
где: ![]() –
полезная мощность,
–
полезная мощность,
![]() –
затраченная мощность.
–
затраченная мощность.
В свою очередь, полезную и затраченную мощность определим по соотношениям:
![]() (3)
(3)
![]() (4)
(4)
где: ![]() –
момент внутреннего сопротивления электродвигателя,
–
момент внутреннего сопротивления электродвигателя,
![]() –
действующее значение тока в обмотках электродвигателя.
–
действующее значение тока в обмотках электродвигателя.
Также момент и ток связаны соотношением:
![]() (5)
(5)
где: ![]() –
моментная постоянная электродвигателя.
–
моментная постоянная электродвигателя.
Подставляя (1) и (5) в (3) и (4), а затем результат в (2), получим связь КПД электродвигателя с моментом, скоростью вращения, и напряжением:
 (6)
(6)
Значения констант для рассматриваемого двигателя приведены в таблице 1
Таблица 1
Значения констант для электродвигателя
|
Величина |
Размерность |
Значение |
|
|
|
150 |
|
|
|
2,17 |
|
|
|
63,5 |
|
|
|
37,2 |
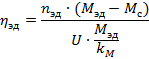
На рис. 2 приведены зависимости скорости вращения и КПД двигателя при номинальном напряжении 48 В.
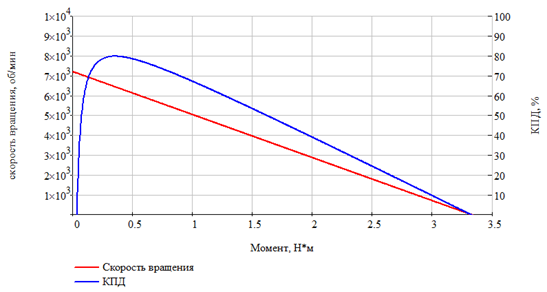
Рис.2. Характеристики электродвигателя
Для описания редуктора воспользуемся характеристиками, заявленными производителем [3]. На рис. 3 показаны зависимости КПД редуктора от момента на выходном валу при разных передаточных отношениях i=5, i=9, i=21. Точками показаны табличные значение, а сплошными линиями – их аппроксимация степенными функциями.
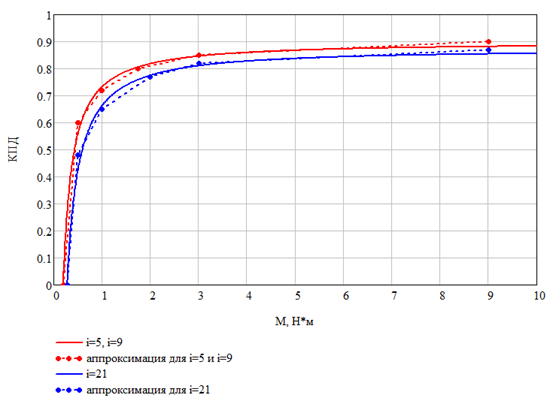
Рис. 3. Характеристики редуктора
С учетом передаточного отношения и КПД редуктора момент на выходном валу связан с моментом на валу электродвигателя следующим образом:
![]() (7)
(7)
где: ![]() –
момент на выходном валу редуктора,
–
момент на выходном валу редуктора,
![]() –
передаточное отношение редуктора,
–
передаточное отношение редуктора,
![]() –
КПД редуктора.
–
КПД редуктора.
КПД всей передачи можем записать как:
![]() (8)
(8)
На рис. 4, 5, 6 представлены поля характеристик при значениях передаточных отношений i=5, i=9, i=21. Сплошные изолинии разделяют соответствуют значениям КПД. Пунктирные изолинии соответствуют значениям полезной мощности. Белым цветом обозначены области, работа передачи в которых невозможна по причине ограничения максимального момента редуктора.
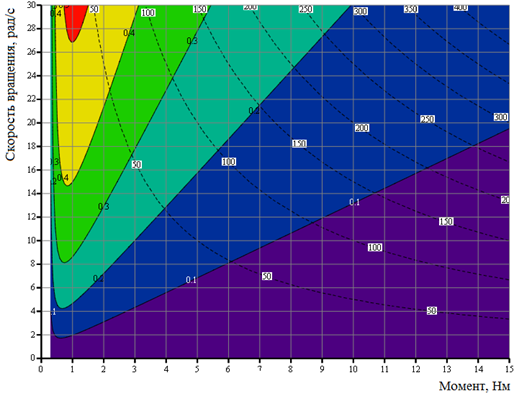
Рис. 4. Поле характеристик при i=5
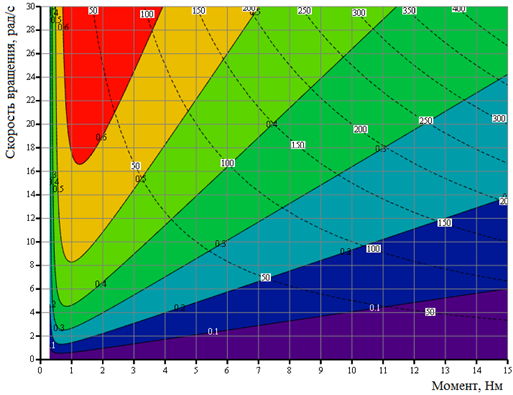
Рис. 5. Поле характеристик при i=9
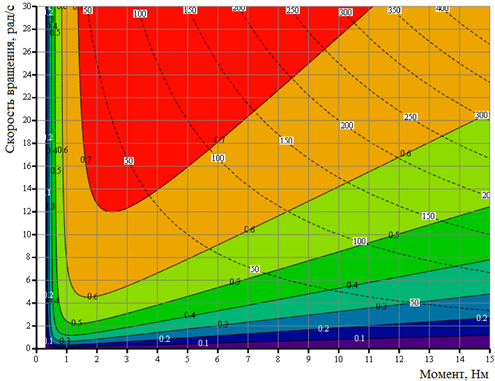
Рис. 6. Поле характеристик при i=21
Описание гидравлической передачи
В состав гидравлической передачи входят аксиально-поршневой насос TFH-080 фирмы Takako и вновь разрабатываемый поворотный гидродвигатель.
Для определения КПД поворотного гидродвигателя необходимо рассчитать утечки по зазорам между сопрягаемыми деталями. Схема для расчета утечек показана на рис. 7.
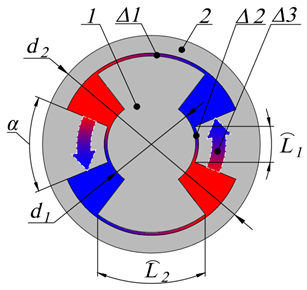
Рис. 7. Схема для расчета утечек в гидроквадранте
Красным цветом показаны полости с
высоким давлением, синим – полости с низким давлением. Выноской 1 обозначен
поворотный разделяющий элемент, выноской 2 – корпус с секторами. Утечка
жидкости происходит в радиальных зазорах Δ1 и Δ2, а также в торцевых
зазорах Δ3 (показано белыми пунктирными стрелками). Ширина рабочей камеры
квадранта равна ![]() .
.
Величина утечки в малом зазоре может быть рассчитана по формуле [4]:
![]() (9)
(9)
где: ![]() –
перепад давлений, под которым происходит утечка,
–
перепад давлений, под которым происходит утечка,
![]() –
ширина зазора,
–
ширина зазора,
![]() –
величина зазора,
–
величина зазора,
![]() –
динамический коэффициент вязкости рабочей жидкости,
–
динамический коэффициент вязкости рабочей жидкости,
![]() –
длина зазора.
–
длина зазора.
Утечка в зазоре Δ1 определяется следующим образом:
![]() (10)
(10)
Утечка в зазоре Δ2 определяется следующим образом:
![]() (11)
(11)
В зазоре Δ3 ширина переменная, поэтому необходимо проинтегрировать:
 (12)
(12)
Перепад давлений в полостях определяется моментом на выходном валу (обозначения величин приведены на рис. 7:
![]() (13)
(13)
Расход жидкости через гидродвигатель зависит от скорости вращения выходного вала:
![]() (14)
(14)
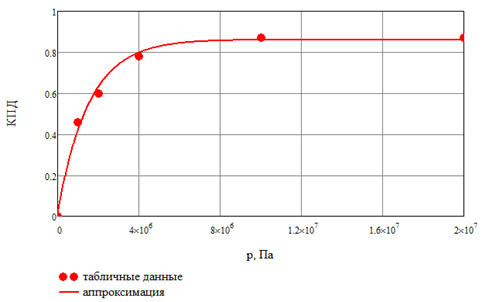
КПД насоса взят из заявленных производителем характеристик [5]. На рис. 8 точками показаны табличные данные, а сплошной линией – их аппроксимация степенной функцией.
Целесообразно применить регулируемый насос для достижения плавного изменения суммарного передаточного отношения. В этом случае нужно ввести величину – параметр регулирования:
![]() (15)
(15)
где: ![]() –
текущий рабочий объем насоса,
–
текущий рабочий объем насоса,
![]() –
максимальный рабочий объем насоса.
–
максимальный рабочий объем насоса.
С учетом параметра регулирования и КПД насоса выражение для момента на валу насоса запишется следующим образом:
![]() (16)
(16)
Скорость вращения вала электродвигателя равна скорости вращения вала насоса и определяется необходимой подачей гидродвигателя и утечками:
![]() (17)
(17)
где: ![]() –
объемный КПД насоса.
–
объемный КПД насоса.
Электродвигатель был описан выше соотношениями (1)-(6).
Суммарный КПД передачи запишем в виде:
![]()
(18)
На рисунках представлены поля
характеристик при значениях параметра регулирования ![]() ,
,
![]() и
и
![]() ,
что соответствует передаточным отношениям i=6, i=9, i=21. ε
,
что соответствует передаточным отношениям i=6, i=9, i=21. ε
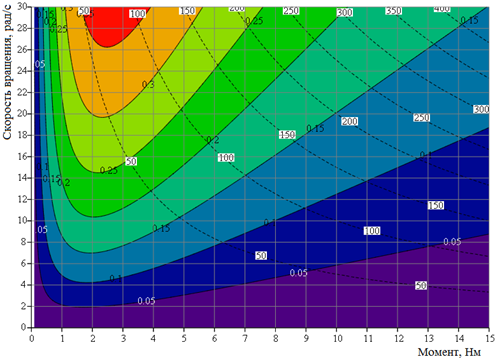
Рис. 9. Поле характеристик при ε=1
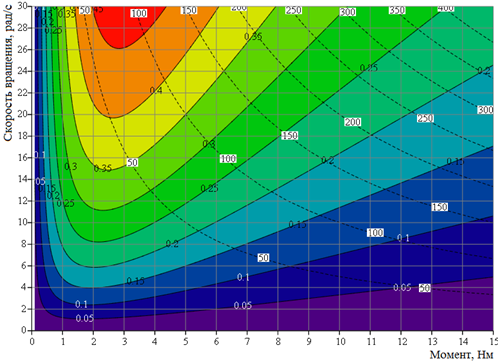
Рис. 10. Поле характеристик при ε=0,75
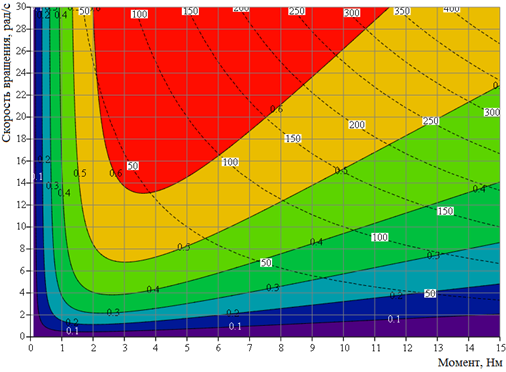
Рис. 11. Поле характеристик при ε=0,32
Анализируя представленные на рисунках 4-6 и 9-11 характеристики, можно сделать вывод, что в целом гидравлическая передача несколько уступает по КПД (на величину до 10%) механической в области малых моментов и примерно равна ей в области больших моментов.
В процессе работы привода возможны ситуации, в которых необходимо развить максимальный крутящий момент. Например, при заклинивании выходного вала или при необходимости движения с максимальным ускорением. При этом требования по затратам энергии оказываются вторичными. Передача с редуктором имеет фиксированное передаточное отношение и ограниченный максимальный момент на выходном валу. В гидравлической передаче за счет изменения рабочего объема насоса можно бесступенчато изменять передаточное отношение в широких пределах, и максимальный момент одинаково достижим из любого состояния.
Подводя итог, можно сказать, что гидравлическая передача имеет существенные функциональные преимущества по сравнению с редуктором, но несколько уступает ему по энергоэффективности.
Также нужно отметить, что вышеприведенные результаты справедливы для работы передачи в установившемся режиме. Затраты энергии в режиме разгона и торможения следует оценивать отдельно.
Рецензенты:Шумилов И.С., д.т.н., профессор, ФГБОУ ВПО Московский государственный технический университет имени Н.Э. Баумана, г.Москва;
Вельтищев В.В., д.т.н., заведующий кафедрой «Подводные роботы и аппараты», ФГБОУ ВПО Московский государственный технический университет имени Н.Э. Баумана, г.Москва.
Библиографическая ссылка
Щербачев П.В., Тарасов О.И. СРАВНИТЕЛЬНАЯ ХАРАКТЕРИСТИКА МАЛОГАБАРИТНЫХ ГИДРАВЛИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ПЕРЕДАЧ // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/ru/article/view?id=16352 (дата обращения: 14.07.2026).