



Современные электромеханические манипуляционные системы строятся на базе без редукторных мехатронных модулей (прямой привод), состоящих из исполнительного двигателя, датчика перемещения и электромагнитного тормозного устройства (ТУ), встроенного в двигатель и предназначенного для фиксации вала двигателя в положении статического равновесия при программном отключении или аварийном исчезновении питания [4]. Положение статического равновесия (режим «Lock») имеет место, например, в манипуляционной системе «двурукого» сборочного робота, одна из рук которого в процессе сопряжения удерживает сборочную единицу в заданном пространственном положении. Для исключения нежелательных переходных процессов указанный выше режим целесообразно реализовать при работе со связанными объектами, в случаях переключения режимов управления, например, с позиционного на силовое, а так же в положениях сингулярности кинематической цепи для их разрешения.
На рисунке 1 приведена функциональная схема модуля, на которой обозначено: М – исполнительный двигатель, ВЕ – датчик перемещения, YB – тормозное устройство. С помощью ключевого элемента Q отражена взаимосвязь между напряжением питания двигателя Uд и напряжением на обмотке электромагнита тормозного устройства Uт :
![]() (1)
(1)
Здесь![]() –
напряжение источника питания электромагнита.
–
напряжение источника питания электромагнита.
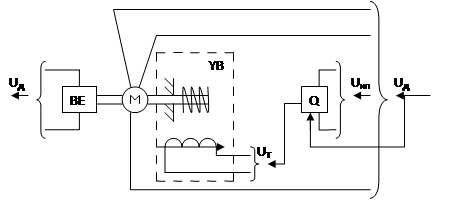
Рисунок 1- Функциональная схема модуля
Тормозящее воздействие, создаваемое ТУ на валу ИД, осуществляется перемещающимися в зазоре диском с помощью постоянных магнитов или упругих элементов. Как показал опыт эксплуатации, ТУ с постоянными магнитами предъявляют повышенные требования к источнику питания электромагнита, обладают низкой надежностью и стабильностью параметров. Исходя из этого, в дальнейшем будем рассматривать ТУ только с упругими элементами.
Для описания процессов, происходящих в ТУ, пренебрежем шунтированием магнитного потока электромагнита конструктивными элементами двигателя, ввиду его малости, упругость контактов тормозного диска с поверхностями, ограничивающими его перемещение, вследствие высокой жесткости, и не будем учитывать цепь разрядки катушки электромагнита. Тогда согласно [3] уравнения движения ТУ будут иметь вид:
![]()
![]()
![]()
![]() (2)
(2)
 .
.
Здесь обозначено: ![]() -
ток в обмотке электромагнита;
-
ток в обмотке электромагнита; ![]() -
активное сопротивление и индуктивность обмотки;
-
активное сопротивление и индуктивность обмотки; ![]() -
усилие, развиваемое электромагнитом;
-
усилие, развиваемое электромагнитом; ![]() -
коэффициент пропорциональности;
-
коэффициент пропорциональности; ![]() -
коэффициенты вязкого трения и жесткости упругих элементов, перемещающих
тормозной диск массой
-
коэффициенты вязкого трения и жесткости упругих элементов, перемещающих
тормозной диск массой ![]() ;
;
![]() -
сила сухого трения, возникающая при перемещении диска;
-
сила сухого трения, возникающая при перемещении диска; ![]() -
максимальное усилие, развиваемое упругими элементами;
-
максимальное усилие, развиваемое упругими элементами; ![]() -
реакция силы нормального давления диска на поверхности, ограничивающее величину
его перемещения;
-
реакция силы нормального давления диска на поверхности, ограничивающее величину
его перемещения; ![]() -
перемещение диска, ограниченное величиной зазора (0,
-
перемещение диска, ограниченное величиной зазора (0,![]() ).
).
Ввиду довольно сложного характера зависимостей (2), при исследовании электроприводов, как правило, используется упрощенное представление тормозных устройств в виде безинерционного звена или инерционного звена первого порядка [5]. Исходя из того, что ТУ, встраиваемые в ИД обладают значительным люфтом при затормаживании двигателя, на основании (2) получим упрощенную нелинейную модель тормозного устройства, содержащую указанный люфт.
![]() Из рассмотрения выражений (2)
следует, что при подаче ступенчатого входного воздействия Uт процесс растормаживания двигателя, описывается уравнением
Из рассмотрения выражений (2)
следует, что при подаче ступенчатого входного воздействия Uт процесс растормаживания двигателя, описывается уравнением
![]() (3)
(3)
![]() ,
,
где ![]() .
.
Процесс торможения, осуществляемый при снятии входного напряжения, описывается всей совокупностью уравнений (2).
Разложение в степенной ряд и использование первого члена разложения позволяет, согласно (3), описать движение ТУ при растормаживании ИД линейным дифференциальным уравнением:
![]() ,
(4)
,
(4)
где ![]() ;
;
![]() -
постоянная времени обмотки электромагнита;
-
постоянная времени обмотки электромагнита; ![]() при
при
![]() .
.
Поскольку при движении диска ТУ не оказывает тормозящего воздействия на ИД, уравнение механического движения из (2) можно исключить и представить его при затормаживании двигателя в виде эквивалентной, по характеру воздействия на двигатель, системы с люфтом, являющимся функцией какой-либо переменной состояния, например, Fэт.
Так как при снятии ступенчатого
напряжения Uт усилие Fэт, развиваемое электромагнитом,
стремиться с течением времени к нулю, то, обозначив Fэт = ![]() при
хт=хт0 и используя (4), можно записать выражение (2) в
следующем виде:
при
хт=хт0 и используя (4), можно записать выражение (2) в
следующем виде:
![]()
![]()
![]() . (5)
. (5)
Исходя из того, что при подаче входного сигнала рFэт>0, а при его снятии рFэт<0 получим следующую математическую модель тормозного устройства:
![]()
![]() ;
;
![]() ;
(6)
;
(6)
![]()
где ![]() .
.
Для исключения «просадок» привода под действием статической нагрузки и отрицательного влияния тормозящего воздействия на параметры движения в структуру привода предлагается включить дополнительные элементы, формирующие управляющее воздействие на ТУ и отраженные на рисунке 2: индикатор момента двигателя, релейный элемент с переменной зоной нечувствительности и датчик статического момента двигателя.
Структура электропривода, содержащего элементы управления ТУ, приведена на рисунке 2.
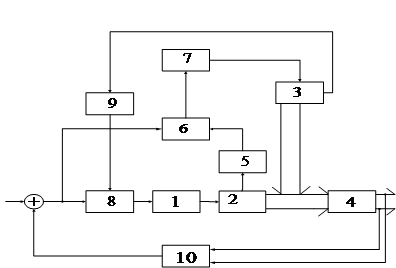
Рисунок 2 - Структура электропривода
Здесь обозначено: 1- преобразователь, 2 -электродвигатель, 3 -тормозное устройство, 4- исполнительный механизм, 5- датчик статического момента электродвигателя, 6 - индикатор момента электродвигателя, 7 - релейной элемент с переменной зоной нечувствительности,8- реле, 9- элемент задержки, 10 – датчик перемещения.
Сигнал рассогласования привода с выхода сумматора поступает на двигатель 2 и вход релейного элемента 7 с переменной зоной нечувствительности [2 ], величина которой равна нулю при разгоне двигателя, т.е. при положительном сигнале с индикатора 6 момента двигателя. Сигнал с релейного элемента 7 с переменной зоной нечувствительности поступает на реле 8, которое размыкает цепь питания электромагнитной муфты 3 и выключает ее из режима торможения. Двигатель 2 начинает вращаться и перемещать исполнительный механизм 4. При переходе двигателя в тормозной режим отрицательный сигнал с индикатора момента двигателя устанавливает величину зоны нечувствительности релейного элемента 7, выбранную исходя из условия обеспечения надежной работы ТУ. При достижении сигналом рассогласования привода указанной величины сигнал с релейного элемента 7 с переменной зоной нечувствительности через реле 8 включает электромагнитный тормоз 3 в режим торможения. Происходит одновременное торможение привода двигателем 2, работающим в режиме противовключения, и тормозом 3. На преобразователь 1 поступает сигнал с датчика статического момента двигателя, пропорциональный моменту, создаваемому тормозящим воздействием тормоза, который устраняет «просадки» скорости исполнительного механизма.
Наличие элемента с релейной характеристикой, имеющего переменную зону не чувствительности, позволяет уменьшить время работы тормозного устройства в процессе останова привода, что снижает его нагрев и износ, а так же повышает надежность работы. Устранение «просадок» скорости исполнительного механизма, вызванных включением тормозного устройства в режим торможения за счет использования датчика статического момента двигателя, повышает плавность перемещения исполнительного механизма и точность работы привода, что позволяет использовать его в различных машинах и механизмах с высокими динамическими характеристиками/
На рисунке 3 приведена компьютерная модель следящего привода с предлагаемым алгоритмом управления ТУ, выполненная с использованием библиотеки Simulink пакета Matlab [1].
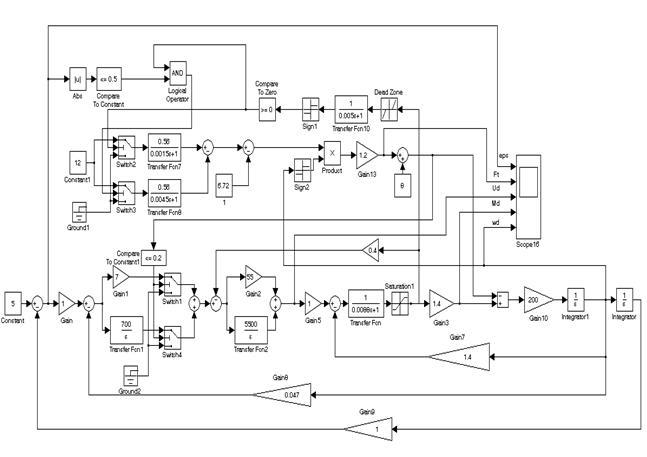
Рисунок 3 - Компьютерная модель привода
На рисунке 4 представлены результаты моделирования при разгоне и торможений двигателя, подтверждающие работоспособность предложенной системы управления ТУ и выполнение предъявляемых требований.
На рисунке 4 обозначено: ε, Мд и ωд – ошибка привода, момент двигателя и угловая скорость его вала соответственно.
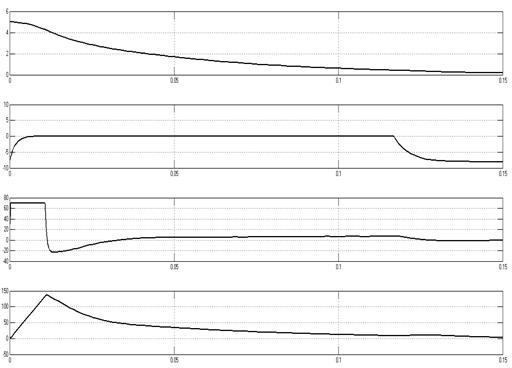 ε, рад
ε, рад
Fэт, н
Мд, н
ωд, рад/c
Рисунок 4 - Результаты моделирования
Работа выполнена при финансовой поддержке РФФИ (проект № 13-08-01364).
Рецензенты:
Гоц А.Н., д.т.н., профессор, профессор кафедры тепловых двигателей и энергетических установок Владимирского государственного университета имени Александра Григорьевича и Николая Григорьевича Столетовых (ВлГУ), г. Владимир.
Кульчицкий А.Р., д.т.н., старший научный сотрудник, главный специалист ООО «Завод инновационных продуктов «КТЗ», г. Владимир.
Библиографическая ссылка
Умнов В.П., Егоров И.Н. РЕАЛИЗАЦИЯ РЕЖИМА «LOCK» В ЭЛЕКТРОМЕХАНИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ СИСТЕМАХ РОБОТОВ С «ПРЯМЫМ» ПРИВОДОМ // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/ru/article/view?id=16050 (дата обращения: 20.07.2026).