



Во многих областях современной техники (сейсмология, космическая и авиационная индустрия, мощные энергетические установки, строительство высотных объектов, транспорт) широко используются датчики ускорения (акселерометры), работающие в очень низком диапазоне частот (0,01…5 Гц). Для поверки и градуировки таких датчиков требуются вибровозбудители, способные обеспечивать прямолинейные горизонтальные гармонические колебания поверяемого акселерометра в столь низком диапазоне частот.
Низкие частоты колебаний вызывают необходимость создания больших амплитуд перемещений для обеспечения приемлимых значений амплитуд ускорений. К настоящему времени создан низкочастотный электродинамический вибровозбудитель с магнитным подвесом подвижной части[1] с диапазоном частот 0,1 – 5 Гц и амплитудой колебаний 0,5 м, который является составной частью Национального Стандарта вибрационного движения Российской Федерации. Однако, развитие современной техники требует расширения частотного диапазона в область сверхнизких частот до 0,01 Гц.
Одним из требований, предъявляемым к вибростенду, работающему в сверхнизком диапазоне частот, является увеличение амплитуды горизонтальных перемещений подвижной части, так как при малых амплитудах скорость и ускорение гармонического закона перемещения, пропорциональные соответственно частоте колебаний и квадрату этой частоты, будут иметь малые амплитудные значения.
Цель исследования
Получить дискретную математическую модель вибростенда и синтезировать цифровую систему управления.
Материал и методы исследования
Приводная часть вибровозбудителя (рис. 1) состоит из магнитопровода, четырех неподвижных катушек намагничивания 1 и одной подвижной катушки 2. Магнитопровод состоит из пяти горизонтально расположенных ферромагнитных стержней круглого поперечного сечения – трех продольных 3 и двух поперечных 4, соединяющих торцевые поверхности продольных стержней.
Катушки намагничивания надеты на поперечные стержни, соединены последовательно, питаются от блока питания постоянным током ![]() и создают постоянное магнитное поле по всей длине рабочего воздушного зазора между центральным и боковыми продольными стержнями. Подвижная катушка свободно надета на центральный продольный стержень. При питании катушки синусоидальным задающим током на нее будет действовать в продольном направлении гармоническая сила электродинамического воздействия.
и создают постоянное магнитное поле по всей длине рабочего воздушного зазора между центральным и боковыми продольными стержнями. Подвижная катушка свободно надета на центральный продольный стержень. При питании катушки синусоидальным задающим током на нее будет действовать в продольном направлении гармоническая сила электродинамического воздействия.
Подвижная катушка вместе с прикрепленным к ней испытуемым акселерометром образует подвижную часть вибровозбудителя, которая снабжена системой активного магнитного подвеса [2].
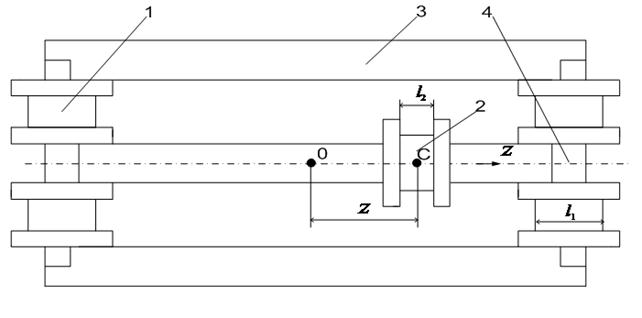
Рис. 1. Система электродинамического привода. 1 - неподвижные катушки подмагничивания; 2 - подвижная катушка; 3 - продольные стержни магнитопровода; 4 - поперечные стержни магнитопровода.
Одна из проблем реализации системы управления электроприводом вибровозбудителя состоит в том, что подвижная часть обладает безразличным положением равновесия. Центр колебаний подвижной части не определен и может находиться в любой точке по длине магнитопровода. Чтобы колебания имели устойчивый центр в средней точке магнитопровода без использования механической пружины, привод снабжается дополнительной системой управления колебаниями, или так называемой электромагнитной пружиной.
Эта система состоит из индуктивного датчика перемещения ![]() подвижной части в продольном направлении из центра колебаний и регулятора. Сигнал с датчика обрабатывается регулятором, усиливается, и его выходной сигнал
подвижной части в продольном направлении из центра колебаний и регулятора. Сигнал с датчика обрабатывается регулятором, усиливается, и его выходной сигнал ![]() суммируется с задающим сигналом
суммируется с задающим сигналом ![]() . Здесь
. Здесь ![]() и
и ![]() - коэффициенты усиления обратной связи по перемещению и скорости соответственно.
- коэффициенты усиления обратной связи по перемещению и скорости соответственно.
Описанная система управления движением была реализована в аналоговом исполнении, при котором регулятор имеет постоянную настройку ( в плане постоянства коэффициентов усиления ![]() и
и ![]() ). Опыт эксплуатации показал, что настройка регулятора должна меняться с изменением частоты колебаний
). Опыт эксплуатации показал, что настройка регулятора должна меняться с изменением частоты колебаний ![]() . поскольку частотный диапазон
. поскольку частотный диапазон ![]() = 0,01...5 Гц предполагает изменение частоты в 500 раз, перенастройка аналогового регулятора сопряжена со значительными трудностями. Этим обстоятельством и вызвана необходимость перехода на цифровое управление, одним из преимуществ которого является высокая гибкость.
= 0,01...5 Гц предполагает изменение частоты в 500 раз, перенастройка аналогового регулятора сопряжена со значительными трудностями. Этим обстоятельством и вызвана необходимость перехода на цифровое управление, одним из преимуществ которого является высокая гибкость.
Для технической реализации цифровой системы управления определим дискретную модель объекта управления.
Объектом управления служит подвижная часть вибровозбудителя, являющаяся динамическим звеном, входной (управляющей) переменной которого является ток ![]() в подвижной катушке магнитопровода, а выходной (управляемой) переменной – координата
в подвижной катушке магнитопровода, а выходной (управляемой) переменной – координата ![]() центра С подвижной катушки относительно центра колебаний О (рис. 19). Так как осуществлен активный магнитный подвес подвижной части вибровозбудителя, то сила трения отсутствует и уравнение объекта имеет вид
центра С подвижной катушки относительно центра колебаний О (рис. 19). Так как осуществлен активный магнитный подвес подвижной части вибровозбудителя, то сила трения отсутствует и уравнение объекта имеет вид
![]() ;
; ![]() ,
,
где ![]() - коэффициент передачи «ток-сила», зависящий от тока
- коэффициент передачи «ток-сила», зависящий от тока ![]() в катушках намагничивания;
в катушках намагничивания; ![]() - масса подвижной части.
- масса подвижной части.
Таким образом, во временной области объект описывается уравнением
![]() ,
,
где коэффициент ![]() . Одна из особенностей цифрового управления – это переход от дифференциальных к разностным уравнениям [ ]. Такой переход вызван тем, что переменные объекта являются функциями непрерывного времени, а переменные цифрового регулятора изменяются только в дискретные моменты времени
. Одна из особенностей цифрового управления – это переход от дифференциальных к разностным уравнениям [ ]. Такой переход вызван тем, что переменные объекта являются функциями непрерывного времени, а переменные цифрового регулятора изменяются только в дискретные моменты времени ![]() , где
, где ![]() - период квантования,
- период квантования, ![]() - целое число.
- целое число.
Пусть система снабжена идеальным квантователем с периодом квантования ![]() и фиксатором нулевого порядка, сохраняющим постоянное значение управляющего тока в течение периода
и фиксатором нулевого порядка, сохраняющим постоянное значение управляющего тока в течение периода ![]() , то есть
, то есть ![]() при
при![]() . Перемещение и скорость примут значения
. Перемещение и скорость примут значения
![]() ;
;
![]() .
.
В результате получаем дискретное описание объекта управления в виде разностных уравнений. Запишем их в матричном виде
![]() ;
;
![]() ,
,
где ;
;  ;
;  ;
;  ;
; ![]() .
.
Известно [4], что дискретный объект[3] будет устойчив, если собственные числа матрицы ![]() находятся внутри единичного круга на комплексной плоскости. Отыскивая собственные числа матрицы
находятся внутри единичного круга на комплексной плоскости. Отыскивая собственные числа матрицы ![]() , как корни уравнения
, как корни уравнения ![]() , где
, где ![]() - единичная матрица, получаем
- единичная матрица, получаем ![]() . Отсюда следует, что объект находится на границе устойчивости, то есть обладает безразличным положением равновесия.
. Отсюда следует, что объект находится на границе устойчивости, то есть обладает безразличным положением равновесия.
Применяя метод ![]() - преобразования к полученной системе разностных уравнений при нулевых начальных условиях, имеем
- преобразования к полученной системе разностных уравнений при нулевых начальных условиях, имеем ![]() , где
, где ![]() - комплексная переменная преобразования;
- комплексная переменная преобразования; ![]() - передаточная функция объекта, определяемая, как
- передаточная функция объекта, определяемая, как
![]() .
.
Определяя обратную матрицу ![]() , приходим к передаточной функции объекта управления
, приходим к передаточной функции объекта управления
 .
.
Блок-схема цифровой системы управления[5] показана на рис.2.
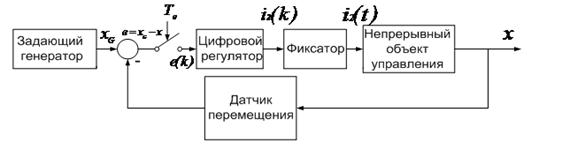
Рис. 2. Блок-схема цифровой системы управления приводом вибровозбудителя.
Перемещение объекта управления ![]() измеряется датчиком. Задающий генератор формирует синусоиду
измеряется датчиком. Задающий генератор формирует синусоиду ![]() , которая квантуется с периодом
, которая квантуется с периодом ![]() и обрабатывается цифровым регулятором. Регулятор совместно с фиксатором вырабатывает управляющий сигнал
и обрабатывается цифровым регулятором. Регулятор совместно с фиксатором вырабатывает управляющий сигнал ![]() , который после усиления поступает на вход объекта управления.
, который после усиления поступает на вход объекта управления.
Используем дискретный ПИД регулятор, реализующий закон управления вида
![]() ,
,
где
 ;
;  ;
;  .
.
Здесь ![]() - коэффициент передачи;
- коэффициент передачи; ![]() - постоянная дифференцирования;
- постоянная дифференцирования; ![]() - постоянная интегрирования. Значения параметров регулятора определялись методом параметрической настройки, то есть по качеству переходного процесса при ступенчатом изменении ошибки
- постоянная интегрирования. Значения параметров регулятора определялись методом параметрической настройки, то есть по качеству переходного процесса при ступенчатом изменении ошибки ![]() .
.
Одним из вариантов технической реализации является применение в качестве устройства цифрового управления персонального компьютера с установленной в нем многофункциональной платой ввода-вывода. На рис. 3 представлена функциональная схема такой системы управления.
Сигнал от датчика положения поступает на вход преобразователя, размещенного в блоке управления. Выходное напряжение преобразователя пропорционально положению подвижной части вибровозбудителя. Данное напряжение через согласующий усилитель, расположенный в устройстве сопряжения, поступает на вход аналогово-цифрового преобразователя платы ввода-вывода персонального компьютера. Персональный компьютер выступает в роли управляющего устройства и реализует цифровой регулятор управления объектом. Рассчитанный регулятором сигнал подается на вход цифро-аналогового преобразователя платы ввода-вывода. Выходное напряжение через согласующий усилитель устройства сопряжения поступает на вход усилителя тока. Усилитель тока управляет током ![]() подвижной катушки вибровозбудителя пропорционально поступающему на вход напряжению.
подвижной катушки вибровозбудителя пропорционально поступающему на вход напряжению.
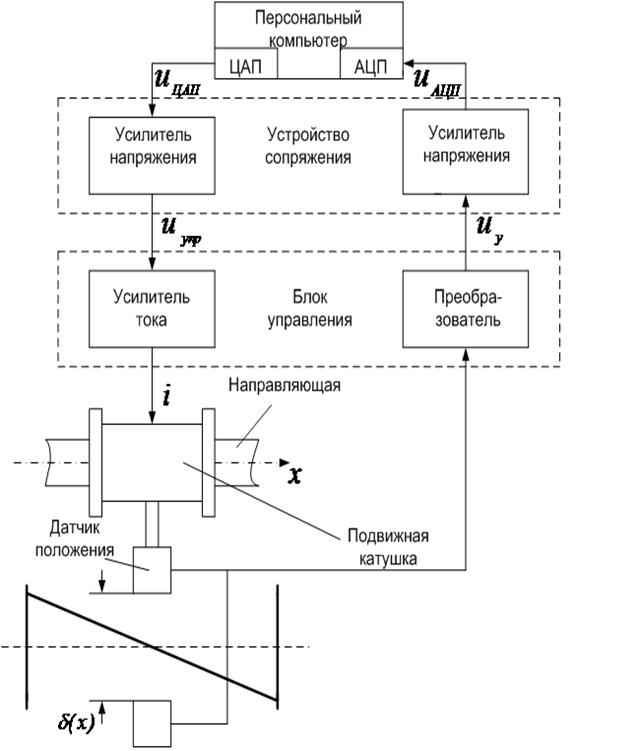
Рис. 3. Функциональная схема системы управления.
Для сглаживания микроскачков тока и ускорения на выход системы можно добавить фильтр.
В качестве устройства ввода-вывода сигналов в цифровой системе управления используется многофункциональная плата PCI – 1711фирмы Advantech. Сигнал с датчика положения поступает на один из каналов аналогового ввода. Управление положением подвижной части осуществляется при помощи канала аналогового вывода.
Точная амплитуда колебаний может быть измерена при помощи лазерного интерферометра. Для ввода сигнала интерферометра в цифровую систему управления используется канал высокочастотного счетчика. Остальные свободные аналоговые и дискретные входы-выходы платы PCI-1711 могут быть задействованы для обеспечения вспомогательных функций управления и индикации. Аппаратное подключение сигналов ввода-вывода реализуется при помощи вспомогательной терминальной платы PCLD-8710-A и соединительного кабеля PCL-10168. Для согласования сигналов используется устройство сопряжения с объектом.
Дифференциальный датчик положения состоит из двух ферромагнитных катушек, движущихся вместе с подвижной частью вибровозбудителя вдоль противоположных сторон натянутой ленты из электротехнической стали (рис. 3). Данная реализация позволяет добиться практически линейной зависимости измеряемого напряжения от положения объекта. Небольшие нелинейности, связанные с неоднородностью материала натянутой ленты устраняются введением в систему управления цифрового фильтра второго порядка по управляющему сигналу.
В качестве датчика положения подвижной части вибровозбудителя также может использоваться лазерный интерферометр.
Программное обеспечение для цифровой системы реализуется на языке высокого уровня Delphi. Основу составляют два модуля:
-модуль управления, который осуществляет реализацию всех алгоритмов работы цифровой системы управления и взаимодействия с оборудованием;
-программа интерфейса оператора, которая позволяет осуществлять настройку параметров объекта управления и цифрового регулятора, задавать исходные данные испытаний, производить анализ текущей информации о работе системы и результатов проведенных опытов.
Результаты исследования
Испытания системы на действующем устройстве показали, что на частотах колебаний 0,2-0,4 Гц возникают резонансные явления, вызванные наложением частоты регулятора на собственную частоту объекта управления. Амплитуда колебаний отличалась в 2-3 раза от заданной. Данная проблема решена введением в алгоритм цифрового регулятора корректирующего амплитудного коэффициента в зависимости от задающей частоты.
Заключение
В ходе проведения исследования получена дискретная математическая модель объекта управления, на ее основе синтезирован цифровой регулятор и построена цифровая система управления низкочастотным электродинамическим вибровозбудителем. Приведенная техническая реализация системы управления испытана на действующем устройстве.
Рецензенты:
Журавлев Ю.Н., д.т.н., профессор кафедры "Строительная механика" ПсковГУ, г. Псков.
Плохов И.В., д.т.н., заведующий кафедрой электропривода и систем автоматизации (ЭСА) ПсковГУ, профессор кафедры ЭСА ПсковГУ, г. Псков.
Библиографическая ссылка
Федоров Д.С., Логинов С.Ю. СИНТЕЗ ЦИФРОВОГО УПРАВЛЕНИЯ НИЗКОЧАСТОТНЫМ ЭЛЕКТРОДИНАМИЧЕСКИМ ВИБРОВОЗБУДИТЕЛЕМ // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/ru/article/view?id=15978 (дата обращения: 14.07.2026).