



В последнее время проектированием электродвигателей с постоянными магнитами занимаются ведущие зарубежные электромашиностроительные компании («Сименс», «Бош Рексрот», «Дженерал Электрик», «Ансальдо», «Фанук» и др.). Кроме того, в большинстве каталогов готовой продукции этих компаний вентильные двигатели с постоянными магнитами представлены на первом месте.
В России в 80-х годах прошлого столетия были разработаны и освоены электроприводы с высококоэрцитивными магнитами, и если электромагнитная часть актуальна по настоящее время, то системы с аналоговым управлением и системы малоинтегрированные цифровые на сегодняшний день не пригодны из-за больших габаритов и веса и не обеспечивают возросшие требования современного рынка.
Таким образом, вопросы проектирования двигателей с высококоэрцитивными магнитами являются актуальными, несмотря на то что содержат большое количество сложных многосторонних задач, решение которых создаст возможность для более широкого применения электродвигателей данного типа в различных отраслях науки и техники.
Целью данной статьи является разработка методики расчета электродвигателя постоянного тока с высококоэрцитивными магнитами, позволяющей по исходным данным получать основные параметры электрической машины.
Решение задачи
В общем случае исходными данными для расчета электродвигателя являются:
-
номинальный вращающий момент, Н•м;
-
максимальный вращающий момент, Н•м;
-
частота вращения, об/мин;
-
напряжение питания
 , В;
, В;
-
коэффициент полезного действия, %.
В некоторых работах [4; 6–9] предъявляются дополнительные требования при проектировании электродвигателей: режим работы, условия работы, способ охлаждения, форма механической и регулировочной характеристики двигателя и другие условия.
Проектирование электрического двигателя с постоянными магнитами разделяется на два этапа [6–8]:
1) определение основных размеров;
2) проверочный электромагнитный расчет.
К основным размерам электродвигателя относят диаметр якоря D, его длину l и величину воздушного зазора d. По величинам D и l определяем размеры и конструкцию всех элементов электродвигателя: полюса, внешний диаметр статора, размеры вала и др. Они определяют массу, технико-экономические, производственные и эксплуатационные характеристики, а также надежность двигателя. Для определения основных размеров пользуются известным выражением для машинной постоянной [7]
![]() ,
,
или
![]() , (1)
, (1)
где ![]() – машинная постоянная; D – диаметр якоря;
– машинная постоянная; D – диаметр якоря; ![]() – расчетная длина якоря; Р' – расчетная мощность;
– расчетная длина якоря; Р' – расчетная мощность; ![]() – расчетный коэффициент полюсного перекрытия;
– расчетный коэффициент полюсного перекрытия; ![]() – коэффициент формы кривой поля;
– коэффициент формы кривой поля; ![]() – обмоточный коэффициент; А – линейная нагрузка;
– обмоточный коэффициент; А – линейная нагрузка; ![]() – индукция в воздушном зазоре; n – номинальная частота вращения ротора.
– индукция в воздушном зазоре; n – номинальная частота вращения ротора.
Расчетную мощность электродвигателя определяют по выражению
![]() , (2)
, (2)
где ![]() ×w – номинальная мощность на валу электродвигателя;
×w – номинальная мощность на валу электродвигателя; ![]() – коэффициент, учитывающий внутреннее падение напряжения в двигателе; E – внутренняя ЭДС якоря.
– коэффициент, учитывающий внутреннее падение напряжения в двигателе; E – внутренняя ЭДС якоря.
Расчетный коэффициент полюсного перекрытия ![]() является функцией конструктивного коэффициента полюсного перекрытия
является функцией конструктивного коэффициента полюсного перекрытия ![]() и отношения минимального воздушного зазора d к максимальному
и отношения минимального воздушного зазора d к максимальному ![]() . Коэффициент формы поля
. Коэффициент формы поля ![]() является функцией
является функцией ![]() и отношения
и отношения ![]() . При синусоидальной форме поля
. При синусоидальной форме поля ![]() . Обмоточный коэффициент
. Обмоточный коэффициент ![]() равняется произведению трех коэффициентов: укорочения
равняется произведению трех коэффициентов: укорочения ![]() , распределения
, распределения ![]() и скоса
и скоса ![]() [7].
[7].
Электромагнитные нагрузки – линейная нагрузка А и индукция в воздушном зазоре ![]() – сильно влияют на размеры электрической машины. Как следует из уравнения (1), увеличение произведения
– сильно влияют на размеры электрической машины. Как следует из уравнения (1), увеличение произведения ![]() , характеризующего электромагнитную мощность, приводит к уменьшению размеров якоря. Однако увеличение произведения
, характеризующего электромагнитную мощность, приводит к уменьшению размеров якоря. Однако увеличение произведения ![]() ограничивается тем, что начиная с некоторого его значения ухудшаются характеристики электродвигателя, кроме того, это приводит к перегреву, а также к увеличению внешних массогабаритных показателей.
ограничивается тем, что начиная с некоторого его значения ухудшаются характеристики электродвигателя, кроме того, это приводит к перегреву, а также к увеличению внешних массогабаритных показателей.
Подстановка в уравнение (1) выбранных значений ![]() ,
, ![]() ,
, ![]() , А,
, А, ![]() , а также подсчитанной расчетной величины Р' и заданной частоты вращения n не позволяет окончательно определить диаметр D и расчетную длину
, а также подсчитанной расчетной величины Р' и заданной частоты вращения n не позволяет окончательно определить диаметр D и расчетную длину ![]() . Для того чтобы однозначно определить величины D и
. Для того чтобы однозначно определить величины D и ![]() , необходимо наложить условие определенного значения отношения
, необходимо наложить условие определенного значения отношения ![]() , тогда из выражения (1) получаем
, тогда из выражения (1) получаем
 . (3)
. (3)
Выбор величины l не является произвольным, задача сводится к определению такого значения, при котором электродвигатель имел бы наименьшие размеры, массу и стоимость.
Известное расчетное значение диаметра якоря D позволяет предварительно определить наружный диаметр двигателя ![]() , где
, где ![]() – коэффициент, учитывающий соотношение между
– коэффициент, учитывающий соотношение между ![]() и D, являющийся функцией числа пар полюсов.
и D, являющийся функцией числа пар полюсов.
При заданных значениях линейной нагрузки, мощности, частоты напряжения и числе пар полюсов удельный объем (на единицу мощности) постоянного магнита определяется выражением
 . (4)
. (4)
Для явнополюсных синхронных электродвигателей форма кривой поля зависит от формы постоянного магнита, очертания полюсного наконечника, длины полюсной дуги ![]() . Для улучшения формы поля воздушный зазор делают неравномерным, изменяющимся по закону
. Для улучшения формы поля воздушный зазор делают неравномерным, изменяющимся по закону
![]() . (5)
. (5)
Соотношение ![]() позволяет получить форму поля, близкую к синусоидальной.
позволяет получить форму поля, близкую к синусоидальной.
С применением ЭВМ проводится моделирование магнитных полей методом конечных элементов в программе ELCUT. Метод конечных элементов достаточно часто используется при моделировании электродвигателей с постоянными магнитами [1–3; 5]. По результатам расчета проводится уточнение размеров электрической машины, проверяется форма поля и рабочая индукция в зазоре.
Зная величины расчетной ЭДС ![]() , частоты f и магнитного потока
, частоты f и магнитного потока ![]() , определяем число витков в фазе обмотки
, определяем число витков в фазе обмотки
![]() , (6)
, (6)
где ![]() – расчетная величина потока.
– расчетная величина потока.
Для дальнейшего расчета обмотки якоря необходимо задаться допустимой плотностью тока в обмотке якоря j, по величине номинального тока определяется требующееся сечение провода
![]() , (7)
, (7)
где ![]() – номинальный ток.
– номинальный ток.
Плотность тока в обмотке якоря зависит от ряда параметров, и в общем случае плотность тока находится в пределах от 5 до 40 А/мм2. Проверяется возможность размещения обмотки в заданном объёме, при необходимости уточняются плотность тока, число витков, размеры электрической машины, а затем проводится моделирование магнитных полей.
Активное сопротивление обмотки в радиальных электрических машинах с пазовым и беспазовым статором определяется выражением
![]() , (8)
, (8)
где ![]() – удельное сопротивление при рабочей температуре;
– удельное сопротивление при рабочей температуре; ![]() – средняя длина витка.
– средняя длина витка.
Потери в электрической машине с постоянными магнитами складываются из джоулевых потерь в обмотке статора, потерь в стали магнитопровода статора и механических потерь. Джоулевы потери определяются по выражению
![]() . (9)
. (9)
Кроме того, необходимо определить потери в стали ярма статора. В беспазовых электрических машинах потери в стали магнитопровода (ярма) записываются в виде [7]
![]() , (10)
, (10)
где ![]() – коэффициент, учитывающий увеличение потерь в стали в результате технологической обработки;
– коэффициент, учитывающий увеличение потерь в стали в результате технологической обработки; ![]() – удельные потери в стали при индукции 1 Тл и частоте 400 Гц;
– удельные потери в стали при индукции 1 Тл и частоте 400 Гц;![]() – масса ярма, кг.
– масса ярма, кг.
Механические потери состоят из аэродинамических потерь и потерь в подшипниках. Аэродинамические потери на трение о воздух в низкоскоростных моментных двигателях малы, и ими можно пренебречь. Потери на трение в подшипниках определяются по формуле
![]() , (11)
, (11)
где ![]() – нагрузка на подшипник;
– нагрузка на подшипник; ![]() – диаметр окружности центров шариков;
– диаметр окружности центров шариков; ![]() – окружная скорость центров шариков.
– окружная скорость центров шариков.
КПД электрической машины определяется по следующей расчетной формуле
![]() , (12)
, (12)
где P – полезная мощность на валу электродвигателя; ![]() – сумма потерь в электрической машине.
– сумма потерь в электрической машине.
При необходимости уточняются некоторые параметры и проводится повторный расчет электродвигателя.
В соответствии с проведенными расчетами по разработанной ранее методике необходимое количество витков провода в фазе должно быть не менее 1288, соответственно в трех фазах общее количество витков равно 3864. Из расчета минимально возможного сопротивления принято решение использовать двойной провод ПЭТВ-2 диаметром 0,16 мм. Расчетный зазор между ротором и статором для укладки обмотки должен быть не более 3 мм. Для выполнения требований по форме ЭДС в виде изменения напряжения по синусоидальному закону используем трехфазную распределенную обмотку с укороченным шагом на 2τ/9 при q=3. Обмотка беспазового статора не имеет скоса, его заменяет секторное распределение проводников с учетом обмоточного коэффициента, равного 0,8973, с числом витков в чередующихся секциях обмотки 23–35–45–35–23 на один полюс с учетом того, что 2р=8 (8 полюсов), данное количество и данное чередование будет повторяться на каждом полюсе фазы А, В, С.
Изготовление столь сложной обмотки требует определенной технологии и подготовительных работ по изготовлению оснастки. Машинные способы укладки для данной обмотки не приемлемы, т.к. отсутствует свободное место для лобовых частей секций, в связи с этим обмотка двигателя укладывается вручную, тип укладки обмотки - волновая двухслойная. Для реализации этой задачи был изготовлен комплект технологической оснастки из фторопласта (рис. 1).

Рис. 1. Комплект технологической оснастки.
На следующем этапе были изготовлены детали двигателя (рис. 2–3).

Рис. 2. Ротор двигателя в сборе.

Рис. 3. Статор двигателя в сборе.
Статор двигателя собран из колец тонкого листового материала 49К2ФАВИ с термической обработкой в вакууме и заформован в основание статора на полимерный компаунд. Отформованная обмотка вклеивается внутрь статора.
Для удобства проведения испытаний электрический двигатель собран в технологическом корпусе (рис. 4).

Рис. 4. Электродвигатель в сборе.
Произведено измерение ЭДС двигателя в генераторном режиме при вращении вала внешним электродвигателем. Результаты измерений ЭДС электродвигателя представлены на рисунке 5. Полученные зависимости указывают на корректную работу электродвигателя.
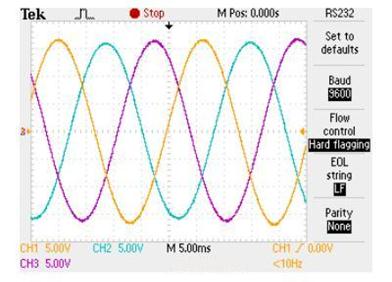
Рис. 5. Линейные ЭДС электродвигателя.
Заключение
В ходе выполнения работы были получены следующие результаты:
-
разработана методика расчета электродвигателя постоянного тока с высококоэрцитивными магнитами, позволяющая по исходным данным (номинальному и максимальному вращающим моментам, частоте вращения, напряжению питания и коэффициенту полезного действия) получать основные параметры электрической машины, что упрощает этап проектирования электродвигателей. На основании полученного расчета проведено изготовление и сборка электродвигателя с постоянными магнитами.
Результаты исследований показывают, что разработанный электродвигатель постоянного тока с высококоэрцитивными магнитами по основным техническим параметрам, определяющим его качественные характеристики, не уступает существующим российским и иностранным аналогам.
Рецензенты:
Харламов В.В., д.т.н., профессор, заведующий кафедрой «Электрические машины и общая электротехника» ФГБОУ ВПО «Омский государственный университет путей сообщения», г.Омск;
Кандаев В.А., д.т.н., профессор кафедры «Инфокоммуникационные системы и информационная безопасность» ФГБОУ ВПО «Омский государственный университет путей сообщения», г. Омск.
Библиографическая ссылка
Лютаревич А.Г., Долингер С.Ю., Чепурко Н.Ю., Хацевский К.В., Лохман Е.А. ВОПРОСЫ ПРОЕКТИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА С ВЫСОКОКОЭРЦИТИВНЫМИ МАГНИТАМИ // Современные проблемы науки и образования. 2014. № 5. ;URL: https://science-education.ru/ru/article/view?id=15250 (дата обращения: 17.07.2026).