



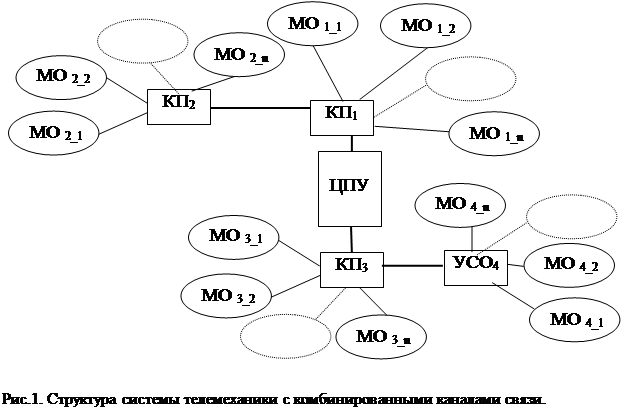
В настоящее время при контроле и управлении распределенными объектами электроэнергетики, нефтедобывающей промышленности и железнодорожного транспорта широко используются системы телемеханики, построенные на сложных магистрально- древовидных структурах [5]. Соединенные магистралью с центральным пунктом управления (ЦПУ) каждое устройство контролируемого пункта (КП) в совокупности с обслуживаемым магистральным энергообъектом (МО) образуют структуры, подобные представленной на рис.1 [5-7].
Эффективность проведения информационных обменов в системах с подобными структурами во многом зависит от используемого в них протокола передачи информации. По комплексу показателей протокол HDLC (X.25) обладает рядом преимуществ: простотой кодирования и декодирования стартового кода (“флага”); возможностью обмена информационными пакетами произвольной длины в пределах установленного максимума; инвариантностью к числу пунктов обмена информацией; достаточно высокой защищенностью от влияния помех, действующих в канале связи, для пакетов произвольной длины [1-3].
В классическом протоколе HDLC для минимизации отрицательных последствий пропуска или ложного формирования “флага” рекомендуется паузы между рабочими циклами заполнять “флагами”. Правило приема информации следующее: первый байт “не флаг” после байтов “флагов”- начало информационного кадра; первый байт “флаг” после байтов “не флагов”- окончание информационного кадра. Рассмотрим последствия при искажениях “флагов”.
1. Потерян “флаг” из последовательности “флагов”, заполняющих паузы между рабочими циклами. Искаженный байт “флага” будет воспринят как начало информационного пакета, который будет закрыт при приеме следующего “флага” (пакет будет отвергнут, но последействие от пропуска “флага” отсутствует). Если потерян “флаг”, открывающий информационный пакет, он сдвигается на один байт влево, декодер зафиксирует ошибку, пакет бракуется, последействие отсутствует, а забракованный пакет будет передан повторно. Если потерян “флаг”, закрывающий информационный пакет, он смещается на один байт вправо, а работа декодера аналогична рассмотренной при сдвиге влево.
2. Сформирована ложная комбинация “флага” в пределах передаваемого информационного пакета. В результате принимаемый пакет будет усечен до места образования ложного закрывающего “флага” и забракован декодером.
Оставшаяся за ложным закрывающим “флагом” часть информационного пакета игнорируется , т.к. для нее не зафиксирован открывающий “флаг”.
Таким образом, все отрицательные последствия при пропуске и ложном образовании “флага” локализуются в пределах одного пакета. Однако, применение классического протокола HDLC, при заполнении пауз между смежными рабочими циклами “флагами”, в реальных условиях функционирования систем телемеханики, приводит к деградации динамики информационного обмена.
В частности, исключается возможность использования одного полудуплексного канала связи для информационного обмена между ЦПУ и КП. Кроме того, при использовании традиционного способа контроля параметров энергообъектов для проведения информационных обменов ЦПУ с несколькими КП скорость передачи данных должна устанавливаться одинаковой для всех КП независимо от их удаления от ЦПУ и соответствовать предельно возможной скорости передачи данных от наиболее удаленного КП.
Следует учитывать, что паузы между рабочими циклами должны использоваться не только для страховки от искажения “флагов”, но и для тактовой синхронизации передатчика и приемника, размещенных на разных концах канала связи. При этом практически невозможно выбрать тактовые генераторы приемника и передатчика, чтобы их частоты в точности совпадали [4].
Указанные проблемы особенно актуальны для систем телемеханики с магистральными каналами связи, пример которой представлен на рисунке 2.
В системах телемеханики для железных дорог протяженность магистрального канала связи может достигать 150-200 км, а величины сопротивления, индуктивности и емкости участков канала связи от ЦПУ до разных КП могут отличаться в десятки раз [5-7]. Указанные параметры участков канала связи определяют и возможную скорость передачи данных разными КП.
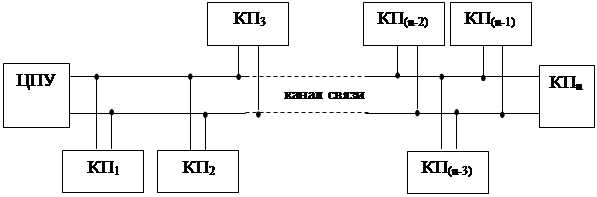
Рис. 2. Структура системы телемеханики с магистральными каналами связи
Для решения данной проблемы предлагается новый способ информационных обменов в магистральных каналах связи, в которых «флаги», заполняющие паузы между передачей информационных сообщений, заменяются на однобайтные «меандры», состоящие из чередующихся сигналов «1» и «0» и предваряющие передачу сообщений от ЦПУ и КП. Благодаря наличию в «меандре» максимального числа переходов от «1» к «0» и от «0» к «1», за относительно малый промежуток времени обеспечивается синхронизация работы ЦПУ и КП. При замене передаваемых «флагов» короткими «меандрами» образуются паузы, которые используются для передачи по одному полудуплексному каналу связи информационных сообщений от КП. В результате информационные возможности системы телемеханики значительно увеличиваются.
На рисунках 3 и 4 показаны временные диаграммы, поясняющие предлагаемый способ формирования информационных сообщений. Информационные обмены разделяются на этап централизованного опроса ЦПУ, готовности к передаче данных каждого КП и один или несколько этапов информационного обмена ЦПУ с КП, от которых поступил признак готовности к передаче информации [8,9].
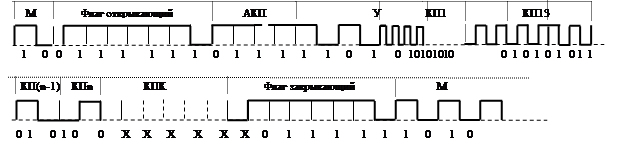
Рис.3. Диаграмма проведения централизованного опроса для магистрального канала
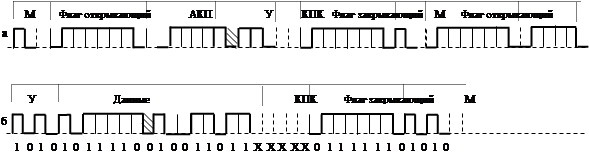
Рис.4. Пример проведения централизованного опроса для одного из КП
В предложенном способе, в соответствии со стандартом ISO 13239, любое сообщение от ЦПУ и КП обрамляется открывающим и закрывающим флагами. Следующий за открывающим флагом код адреса КП (АКП) по ISO 13239 может быть однобайтным или двухбайтным. Двухбайтный АКП используется, если в систему телемеханики включается более 127 КП. Признаком использования двухбайтной адресации является сигнал «1» в старшем разряде первого байта адреса. Для режима опроса в качестве адреса ЦПУ используется код, не используемый для указания адреса какого-либо КП. В приведенном на рис.3 примере для централизованного опроса используется код поля адреса, состоящий из сигналов «1» .
Вид передаваемых или запрашиваемых данных определяется кодом поля управления («У»). За полем управления следует информационное поле. В предлагаемом способе информационное поле этапа централизованного опроса КП (рис.3) разделяется на n равных частей для n КП. Номер КП соответствует номеру выделенной части информационного поля. Так как все КП синхронизированы передаваемыми от ЦПУ меандрами, каждый КП определяет временной отрезок своей части и в его пределах передает признак наличия или отсутствия данных для передачи в ЦПУ.
Все компоненты сообщения между «флагами», как и в ISO 13239, образуют передаваемый полином, который защищается от искажений двухбайтной контрольной последовательностью кода (КПК). КПК соответствует остатку от деления передаваемого полинома на образующий полином 215+212+25+1 .
Каждое сообщение в ходе централизованного опроса КП, формируется ЦПУ и передается в канал связи на минимальной скорости, соответствующей скорости передачи данных от наиболее удаленного КП. Это обеспечивает нормальный прием команды централизованного опроса всеми КП независимо от их удаления от ЦПУ. Важной особенностью предлагаемого способа является передача на выделенной для каждого КП части информационного поля признака наличия (отсутствия) данных для передачи на скорости, соответствующей возможностям этого КП. Этап централизованного опроса завершается передачей КПК и закрывающего флага, после чего возобновляется передача от ЦПУ синхронизирующей комбинации 10101010. ЦПУ анализирует принятые в информационном поле кодовые комбинации от всех КП; по виду комбинации сигналов на всех участках определяется как допустимая скорость информационного обмена с каждым КП, так и наличие (отсутствие) данных для передачи.
При поступлении признаков отсутствия данных для передачи от всех КП ЦПУ может повторно провести этап централизованного опроса КП или принудительно запросить какие-либо данные от выбранного КП.
При наличии данных от КП ЦПУ проводит один или несколько этапов информационного обмена с КП, передавшими соответствующий признак на этапе централизованного опроса. Если признак наличия информации принят от нескольких КП, ЦПУ проводит поочередные этапы информационного обмена с этими КП, причем порядок обмена определяется установленным приоритетом КП.
Для примера на рисунке 3 показано, что каждому КП выделяется два бита, причем для повышения помехоустойчивости признак наличия или отсутствия данных для передачи в ЦПУ передается корреляционным кодом. Код «10» соответствует готовности КП к передаче информации, а код «01» - отсутствию данных для передачи. Код «00» является признаком неисправности или отсутствия соответствующего КП [3,8,9]. Если для КП предельно возможная скорость соответствует скорости передачи от ЦПУ сообщения централизованного опроса, комбинация «10» или «01» на соответствующем участке информационного поля передается один раз (на рис.3 такая комбинация передается КПn-1 и КПn. Для КП13, КП14 и КП15 допустимая скорость передачи вдвое выше минимальной, поэтому для КП такого типа в двух разрядах кода комбинация сигналов «10» или «01»повторяется дважды, т.е. в канал связи передаются сигналы «1010» или «0101» . Для КП1 (в приведенном на рисунке 3 примере) допустимая скорость передачи в четыре раза выше минимальной, поэтому для такого типа КП кодовая комбинация повторяется четыре раза, т.е в канал связи передаются сигналы «10101010» или «01010101».
На рисунке 4 показан пример проведения информационного обмена с КП15, от которого на этапе централизованного опроса поступил признак наличия информации для передачи в ЦПУ. Скорость передачи данных определяется по виду кода, полученного от КП15 на этапе централизованного опроса, которая в приведенном примере вдвое выше минимальной. Для кода – команды вызова данных от КП, используется комбинация сигналов 1110. Передача сообщения от ЦПУ завершается кодами КПК и «закрывающего флага». В ответ от КП15 на скорости, определенной в цикле централизованного опроса КП, передается АКП - 00001111, код поля У, соответствующий виду передаваемой информации (код 1010) и данные (код -101111110011011х…).
Рассмотрим эффективность использования предложенного способа для следующего варианта системы: общее число КП равно 40, для 31-40 КП скорость передачи данных равна v, для 21-30 КП скорость передачи данных равна 2v, для 11-20 КП скорость передачи данных равна 4v, для 1-10 КП скорость передачи данных равна 8v, каждый КП передает информационное сообщение длиной в 20 байт (160 бит). В расчете длина «меандров», предшествующих передаче каждого информационного сообщения, а также bit stuffinq не учитываются в связи с незначительным влиянием на общее время передачи.
Длина этапов централизованного опроса КП и информационного обмена КП с ЦПУ определяется по временной диаграмме рис. 3 и 4. Для рассматриваемого примера длина этапов равна, соответственно, 128 и 256 бит. При использовании для передачи данных одинаковой для всех КП скорости v время сбора информации от всех КП Тобщ окажется равным:
![]() , (1)
, (1)
а при передаче данных на указанных в примере индивидуальных скоростях для каждой группы КП время сбора информации (ТИНД) составит:
![]() . (2)
. (2)
Из формул (1) и (2) видно, что время сбора информации при использовании предложенного способа более чем в два раза уменьшается, т.е. вдвое увеличивается оперативность системы диспетчерского управления. Очевидно, что при увеличении числа КП, которые могут проводить информационные обмены на более высокой скорости, эффективность предложенного способа увеличивается.
Выводы
Показано, что предложенный способ позволяет проводить информационные обмены ПУ с рядом КП по одному полудуплексному магистральному каналу связи и использовать для передачи данных от каждого КП максимально возможную для него скорость. Это обеспечивает повышение информативности и оперативности многоуровневой системы телемеханики.
Рецензенты:
Портнов Е.М., д.т.н., профессор кафедры “Информатика и программное обеспечение вычислительных систем” Национального исследовательского университета “МИЭТ”, г.Москва.
Гагарина Л.Г., д.т.н., профессор, зав. кафедры “Информатика и программное обеспечение вычислительных систем” Национального исследовательского университета “МИЭТ”, г.Москва.
Библиографическая ссылка
Артюшенков С.Н., Баин А.М. К ВОПРОСУ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ КОНТРОЛЯ МАГИСТРАЛЬНЫХ ЭНЕРГООБЪЕКТОВ // Современные проблемы науки и образования. 2014. № 4. ;URL: https://science-education.ru/ru/article/view?id=14146 (дата обращения: 28.07.2026).