



В настоящее время при подготовке операторов эргатических систем основное внимание уделяется на подготовку экипажа в целом, а не на оттачивание индивидуального мастерства каждого члена [5] (в частности, подготовка экипажа самолета: летное обучение в рейсовой обстановке; участие всего экипажа в решении полетных ситуаций, ведущих к авиационным происшествиям; упор на мобилизацию человеческих ресурсов; недопущение ошибок, связанных с человеческим фактором; усиление роли инструктора [1; 9]). Разработка тренажеров, как правило, осуществляется исходя из его модульности. Концепция модульности предполагает возможность объединения, разделения и модификации отдельных элементов без их влияния на систему в целом. При модульной архитектуре систем модули могут создаваться независимо друг от друга и объединяться в блоки для получения необходимых результатов. Облегчается их реконструкция и модернизация при изменении требований к ним без существенного воздействия на другие модули (например, при изменении тормозной системы летательного аппарата (ЛА) можно ограничиться соответствующими изменениями в модуле «Тормозная система» авиационного тренажера (АТ)). Однако усилия по модульному построению систем не достигнут цели без четкого определения взаимосвязей между модулями, требований для разработки и внедрения модулей, а также элементов интерфейса (позволяющих введение новых технологий с учетом взглядов их создателей, а также эксплуатирующих организаций). Однозначно вряд ли можно установить экономическую целесообразность выбора модульного принципа построения АТ, но во многих случаях возможно достичь уменьшения риска, сокращения сроков исполнения и стоимости разработок. По-видимому, максимальные результаты при модульном построении будут получены при разработке АТ на базе уже существующих модулей.
Необходимая реалистичность моделирования требует достаточно быстрой реакции на входные воздействия, что вызывает большие нагрузки на вычислительную систему по обработке данных (при дополнительных трудностях, связанных с соответствием данных основным форматам). Наибольшие трудности связаны с необходимостью выполнения всех операций в реальном масштабе времени. Модульный подход, облегчая некоторые трудности, налагает дополнительные ограничения, связанные с приведением данных в совместимую форму, на систему в целом. Однако присущая модульному подходу гибкость значительно перекрывает указанные ограничения по обработке данных. Вычисления могут распределяться между различными процессорами. Отметим, существует потенциальная опасность выбора узкоспециализированного подхода с определением некоторой архитектуры ЭВМ и установкой жесткой структуры интерфейса с применением специального языка программирования. Должна существовать возможность создания новых необходимых модулей на основе единого подхода для обеспечения совместимости модулей друг с другом. Модули и интерфейс могут рассматриваться с функциональной точки зрения (логический уровень) или как набор аппаратных и программных модулей (физический уровень). Передача информации может интерпретироваться как ряд сообщений между функциональными модулями, поэтому на логическом уровне рассматривается содержание сообщений, определяются передающие и принимающие модули, а также условия, при которых осуществляется передача сообщений. На этом же уровне определяются вопросы точности и объекты моделирования. Здесь не определяются характеристики ЭВМ, языки программирования, среда, в которой передаются сообщения (линии передачи данных, коаксиальный кабель и др.). Физический уровень - среда, в которой существуют и взаимодействуют модули. На этом уровне рассматриваются скорости передачи данных, обнаружение и исправление ошибок, объем памяти, аппаратные средства связи, типы ЭВМ, языки программирования и др. (типы тренажеров (специализированные, функциональные или комплексные), функции, которые осуществляют модули, на этом уровне не рассматриваются). Указанное разделение позволяет достичь основной цели - разделить указанные уровни так, чтобы изменения на одном уровне не вызывали изменений на другом. Так, можно модернизировать модули акселерационных эффектов, визуализации, установить другие ЭВМ и др. без изменения логической структуры АТ или, наоборот, использовать различные элементы физического уровня для создания конкретных АТ.
Решение вопроса о взаимодействии модулей на самом деле является решением задачи передачи данных от модуля к модулю. Для их связи необходима схема сопряжения (в идеале - универсальная). Если принимающий и передающий элементы системы находятся в различных физических модулях, то информация может передаваться через локальные сети. Если элементы расположены в тесно взаимодействующих физических модулях (например, две ЭВМ одной системы), то сообщения могут передаваться через устройства внешней памяти или высокоскоростную сеть передачи данных. Если оба логических модуля находятся внутри одного физического, то информация может передаваться через операционную систему. При этом во всех случаях сообщения должны быть одинаковыми по объему, формату и условиям передачи. Если передающий и принимающий логические модули находятся в одном физическом модуле, то среда передачи информации может быть выбрана создателем модуля. Если они находятся в тесно взаимодействующих физических модулях, то способ их связей определяется создателями модулей. Если логические модули располагаются в различных физических модулях, созданных различными фирмами, то связь между этими физическими модулями определяется головным разработчиком. Формы физической связи могут быть различными. Выбор универсальной физической связи является одной из основных задач головного разработчика АТ (основа модульного подхода на целый ряд лет).
Специального рассмотрения при модульном подходе требует вопрос программного обеспечения. Наибольшие усилия затрачиваются на обеспечение мобильности программного обеспечения; очевидна необходимость языка для обслуживания всех встроенных вычислительных систем. Однако вопрос использования такого языка при модульном подходе должен решаться с осторожностью. Вряд ли все программы логического уровня должны быть написаны с его использованием. Как и аппаратные средства, языки постоянно совершенствуются, модернизируются, создаются новые. Доля стоимости математического обеспечения в общей стоимости АТ постоянно возрастает. Поэтому повышение эффективности труда программиста становится все более важной. Во избежание сложности внедрения технических новшеств требования к модулям, интерфейсу и др. не должны быть чрезмерно жесткими и замыкаться на существующих технологиях. Залог успеха - в создании достаточно гибких модулей и системы в целом. Модуль должен определяться функционально. Типы используемых ЭВМ, длина слов, язык программирования и т.п. не должны входить в определение модуля.
Рассмотренный подход использовался при разработке ряда комплексных тренажеров самолетов Ил-76МД, Ил-96-300, Ту-204, Ан-72, Ан-74 и др., широко используемых для подготовки летного состава в учебно-тренировочных центрах.
Для иллюстрации рассмотрим некоторые модули.
Модуль имитатора динамики полёта. Структурная схема с указанием взаимосвязей с другими имитаторами приводится на рис. 1 (используются стандартные обозначения [1]). В модуле воспроизводится движение самолёта в пространстве (решение замкнутой системы нелинейных дифференциальных уравнений; входные параметры - управляющие воздействия экипажа, выходные - параметры полёта). Моделируются: движение по ВПП и рулёжным дорожкам; взлёт и набор высоты; полёт по маршруту, снижение и заход на посадку; уход на второй круг (с использованием средств комплекса стандартного пилотажно-навигационного оборудования); экстренное снижение; полёт по кругу, заход на посадку и посадка; пробег по ВПП с использованием всех средств торможения; полёт при опасных внешних воздействиях. Учитываются: температура воздуха и атмосферное давление; высота (уровень местности) аэродрома; горизонтальная составляющая скорости ветра; сдвиг и порывы ветра (вертикальный и горизонтальный); обледенение (изменение аэродинамических характеристик); состояние ВПП; сила тяжести и центровка самолёта; режимы работы силовой установки (включая реверс); положение управляющих поверхностей, механизация крыла, шасси (при движении по земле учитываются характеристики устойчивости и управляемости; коэффициенты увода и трения колёс с учетом состояния ВПП, торможения колёс и работы антиюзового устройства); аэроупругость.
Для обеспечения подобия реального и моделируемого полёта самолёта осуществляется непрерывное вычисление параметров полёта в реальном масштабе времени [2; 3; 6-8]. Экипажу с соответствующих модулей предоставляются визуальная, акустическая, акселерационная информации, показания приборов пилотажно-навигационного комплекса, положения и усилия на органах управления (формируемых в соответствии с параметрами, получаемыми в имитаторе динамики полёта). Используются сигналы и параметры из имитаторов и систем (связь осуществляется на основе внутримашинного и межмашинного обмена информацией), декомпозиция системы уравнений движения (продольное и боковое движения, движение по земле, модуль аэродинамических коэффициентов [2; 4]).
Модуль имитатора системы управления. Предназначается для управления полётом на тренажёре и привития экипажу навыков по использованию системы управления, выдачи информации во взаимодействующие системы. Совместно с модулем имитатора автоматической системы штурвального управления обеспечивает:
- расчетное определение положения рулевых поверхностей (органов управления) в зависимости от сигналов с датчиков положения рычагов управления, параметров полёта и параметров, формируемых имитатором вычислительной системы управления полётом;
- определение требуемых характеристик устойчивости и управляемости полёта с учетом алгоритмов управления имитатора;
- автоматическое ограничение предельных режимов полёта, а также предупреждение экипажа о выходе за пределы основных эксплуатационных режимов полёта;
- воспроизведение нагрузок на рычагах управления;
- имитацию характерных отказов.
Используется полунатурное моделирование на базе бортового оборудования. Обеспечивается имитация работы каналов управления стабилизатором, рулём высоты, элеронами, интерцепторами, воздушными тормозами и рулём направления. В модуле имитируются вероятные отказы реальной системы управления самолёта.
Модуль имитатора силовой установки. Модуль обеспечивает воспроизведение работы: маршевых двигателей, вспомогательной силовой установки, системы контроля вспомогательной силовой установки, системы автоматического регулирования, автомата пуска двигателя, электронного регулятора режимов работы вспомогательной силовой установки. Имитация осуществляется на основе математического моделирования характеристик силовой установки в базовом вычислителе тренажёра с использованием блочно-модульной структуры программного обеспечения.
Таким образом, в работе приводятся методологические принципы модульного построения тренажеров с разработкой основных модулей. Результаты исследований использованы при разработке динамических стендов и комплексных тренажеров самолетов Ил-76МД, Ил-96-300, Ту-204, Ан-72, Ан-74 и др. Приведенные принципы разработки авиационных тренажеров могут использоваться при проектировании и других управляемых в пространстве динамических систем.
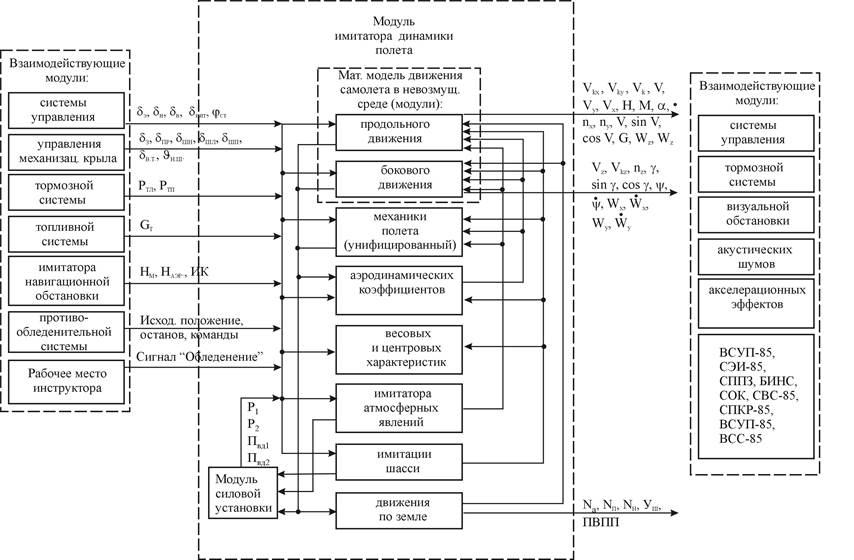
Рис. 1. Структурная схема модуля имитатора динамики полета.
Рецензенты:
Кошев А.Н., д.т.н., профессор, профессор кафедры информационно-вычислительных систем Пензенского государственного университета архитектуры и строительства, г. Пенза.
Логанина В.И., д.т.н., профессор, зав. кафедрой «Управление качеством и технологии строительного производства» Пензенского государственного университета архитектуры и строительства, г. Пенза.
Библиографическая ссылка
Будылина Е.А., Данилов А.М., Пылайкин С.А., Лапшин Э.В. ТРЕНАЖЕРЫ ПО ПОДГОТОВКЕ ОПЕРАТОРОВ ЭРГАТИЧЕСКИХ СИСТЕМ: СОСТОЯНИЕ И ПЕРСПЕКТИВЫ // Современные проблемы науки и образования. 2014. № 4. ;URL: https://science-education.ru/ru/article/view?id=13874 (дата обращения: 18.07.2026).