



В настоящее время, благодаря появлению новых технологий, появилась возможность значительно продвинуться в одном из перспективных направлений развития современного кораблестроения – в направлении создания «полностью электрического корабля» [4].
Силовая электроника дала возможность использовать полупроводниковые преобразователи частоты (ППЧ) большой мощности для создания мощных преобразовательных комплексов и расширения диапазона применения гребного электропривода (ГЭП). Совершенствование же технологий создания винто-рулевых колонок (ВРК) позволяет отказаться от рулей и носовых подруливающих устройств, обеспечивая отличные динамические качества и манёвренность судна.
Объединение электротехнических и энергетических комплексов в единую электро-энергетическую систему (ЕЭЭС), решающую задачи как обеспечения потребителей собственных нужд, так и движения судна в целом, резко усложнили чисто электротехнические вопросы, решаемые ранее автономно. Использование на судах мощных потребителей привело к резкому увеличению установленной мощности электростанций, что, в свою очередь, потребовало увеличения напряжения на шинах главных распределительных щитов. Резко изменились параметры генераторных агрегатов судовых электростанций (СЭС). Потребовались исследования возможности применения в составе СЭС ранее неизвестных перспективных генераторных агрегатов. Последствия аварийных режимов стали более угрожающими, что потребовало дополнительных исследований не только штатных, но и аварийных режимов работы генераторных агрегатов судовых электростанций [2].
Известно, что длительность безаварийной работы любого технического оборудования и судового электрооборудования, в частности, зависит от качества его проектирования, изготовления и условий эксплуатации. При этом недостатки, допущенные на этапах проектирования, в значительной мере отражаются на всех последующих этапах. Поэтому абсолютно необходимо уже на стадии проектирования предусматривать возможности аварий, уметь дать оценку характеру протекания аварийных процессов и определить пути вывода системы из аварийного состояния с минимальным ущербом для неё и обслуживающего её персонала.
ЕЭЭС судов с электродвижением являются сложнейшими машинно-вентильными комплексами, включающими в себя главные синхронные турбо- и дизель-генераторы, гребные электродвигатели (ГЭД) с мощными силовыми ППЧ, ВРК и системы приёма и распределения электроэнергии (рис.1). Совокупность последних определяет архитектуру СЭС, отличающихся большим разнообразием элементов, а, следовательно, и процессов, происходящих в установившихся и переходных режимах их работы.
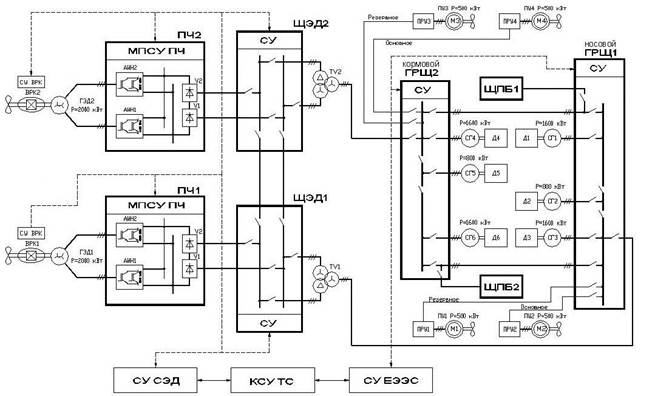
Рисунок 1. Структура ЕЭЭС грузового судна с электродвижением
Функциональные связи, существующие между элементами ЕЭЭС, описываются системами нелинейных алгебраических и дифференциальных уравнений высокого порядка. Это характеризует ЕЭЭС как сложную динамическую систему. Поэтому при проектировании судовых ЕЭЭС необходимо одинаково тщательно рассматривать процессы как в электрических машинах, так и в ППЧ.
Теория электрических цепей и электрических машин переменного тока позволяет записать уравнения основных функциональных элементов СЭС безотносительно к выбираемым координатным осям и системам координат. Эти уравнения учитывают баланс напряжений статорных и роторных контуров, выражения статорных и роторных потокосцеплений, баланс моментов электрических машин и баланс токов в узлах цепей.
Систему уравнений, используемую для моделирования динамических режимов работы СЭС, можно записать в виде [1]:
![]() (1)
(1)
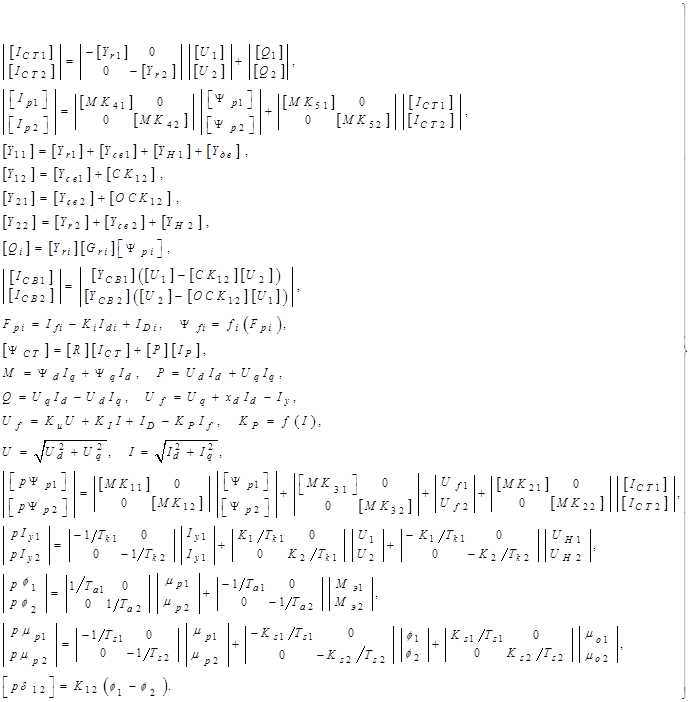
куда входят матрицы параметров и векторы переменных состояний генераторов, первичных двигателей, регуляторов напряжения и частоты вращения, параметры нагрузки и линии связи.
Результаты моделирования динамических режимов параллельной работы генераторов СЭС ЕЭЭС представлены на рис.2.
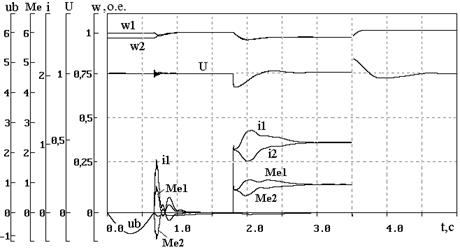
Рисунок 2. Пример расчёта динамических режимов параллельно работающих СГА СЭС
Разработка многоагрегатных СЭС, транзисторных и тиристорных ГЭП связана с анализом новых схем и большим объемом расчётов как при выборе структуры и элементов силовой части, так и при выборе состава и алгоритмов системы управления. В настоящее время разработано много сред моделирования, позволяющих осуществить анализ электромагнитных и электромеханических процессов в силовых электронных схемах и электромеханических устройствах (MatLab, DisignLab, MathCAD, MicroCAP, CASPOC и др.).
Для высококачественного управления асинхронным ГЭП в широком диапазоне регулирования скорости, в том числе в области нулевых скоростей, необходимо иметь возможность быстрого, непосредственного управления моментом ГЭД. Для получения требуемого момента необходимо вычислять координаты ГЭД, недоступные прямому измерению, и управлять амплитудой и фазой вектора напряжения, так чтобы поддерживать на заданном уровне потокосцепление и момент.
Реализация алгоритмов векторного управления с использованием математических моделей асинхронного ГЭД базируется на информации о фазных токах, протекающих в обмотках статора электродвигателя и скорости вращения ротора. Эта же информация используется в ГЭП в качестве сигналов обратной связи.
Математическая модель в алгоритмах векторного управления используется для вычисления некоторых ненаблюдаемых параметров ГЭД, которые затем принимают участие в процессе управления [5].
Вычисление параметров ненаблюдаемых координат асинхронного ГЭД производится в соответствии с выражениями:
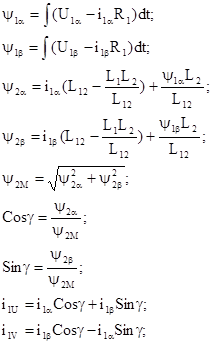 (2)
(2)
![]()
куда входят параметры и векторы переменных состояния математической модели ГЭД [3].
Схема частотно-регулируемого ГЭП для векторного управления ГЭД, входящего в состав СЭД грузового судна с электродвижением, представлена на рис. 3:
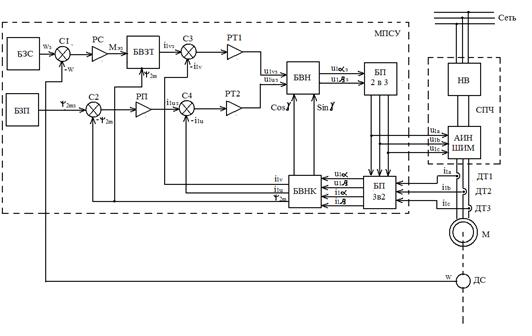
Рисунок 3. Структура математической модели ГЭП грузового судна с электродвижением
Результаты математического моделирования установившегося режима работы ГЭП и динамических режимов работы СЭД при пуске, реверсе и остановки ГЭД представлены на рис. 4 и рис. 5.
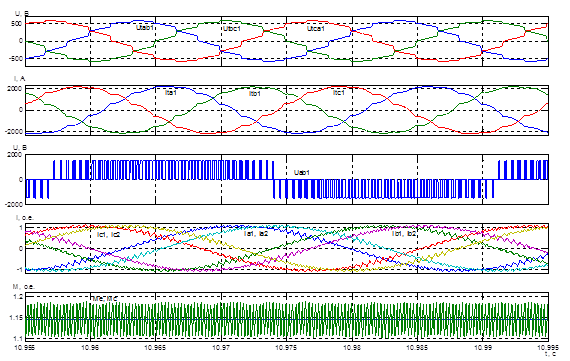
Рисунок 4. Результаты математического моделирования установившегося режима работы ГЭП
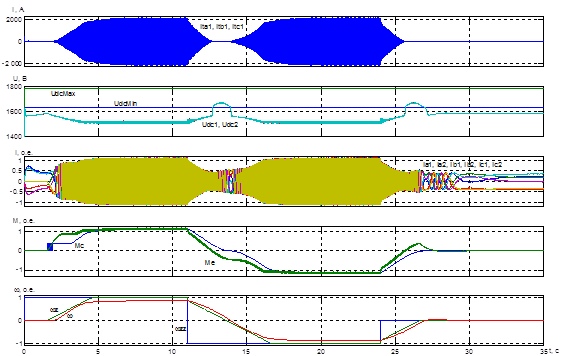
Рисунок 5. Результаты математического моделирования режимов работы СЭД при пуске, реверсе и остановке ГЭД
Выводы
Представленное в работе математическое описание СЭС и СЭД позволяет исследовать штатные и аварийные режимы работы различных вариантов судовых ЕЭЭС.
При интегрировании математического аппарата исследования режимов работы ЕЭЭС в систему уравнений, описывающих динамику движения судна в целом, удаётся получить инструмент для оценки динамических режимов работы судна. Созданные варианты поставочных комплексов ЕЭЭС в настоящее время вводятся в эксплуатацию и проходят апробацию на целом ряде отечественных судов с электродвижением.
Рецензенты:
Коновалов А.С., д.т.н., профессор кафедры «Метрологическое обеспечение инновационных технологий» Санкт-Петербургского государственного университета аэрокосмического приборостроения (ГУАП), г. Санкт-Петербург.
Цицикян Г.Н., д.т.н., профессор, начальник отдела филиала «ЦНИИ СЭТ» Крыловского государственного научного центра, г. Санкт-Петербург.
Библиографическая ссылка
Васин И.М. РАСЧЕТ И МОДЕЛИРОВАНИЕ РЕЖИМОВ РАБОТЫ ЕДИНЫХ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ СУДОВ С ЭЛЕКТРОДВИЖЕНИЕМ. // Современные проблемы науки и образования. 2014. № 3. ;URL: https://science-education.ru/ru/article/view?id=13535 (дата обращения: 27.06.2026).