



Введение
Развитие промышленности требует комплексного подхода при разработке САУ техническими объектами. Это обусловлено, с одной стороны, необходимостью повышения качества управления при минимальных затратах на создание и эксплуатацию систем, с другой стороны – усложнением структуры объекта управления, функций, выполняемых им, и, как следствие, увеличением факторов неопределённости, которые необходимо учитывать для управления объектом. На данный момент широко используются «мягкие вычисления», принцип которых заключается в обеспечении приемлемого качества управления, при невысоком уровне затрачиваемых ресурсов, в условиях неопределённости [2].
Для непрерывных процессов применяют двухпозиционные или ПИД-регуляторы. Возникновение сильных помех приводит к изменению параметров во времени или наличия запаздывания, классические регуляторы могут не справиться со своей задачей. В подобных случаях замена (дополнение) ПИД-регуляторов регуляторами на нечеткой логике часто оказывается более удобной в связи с простотой использования, чем применение усложненных регуляторов состояния или адаптивного подхода [4].
Лингвистические переменные, используемые в fuzzy-регуляторе, задаются на количественной шкале, с помощью которой определяются степени соответствия данных рассматриваемым понятиям. Для этого используются функции принадлежности, принимающие значения от 0 до 1. Кроме того, задается набор правил, ставящих в соответствие входной ситуации определённое управляющее воздействие. Эти правила обычно имеют вид «Если …, то…» [1].
В данной работе был произведен сравнительный анализ аналогового регулятора и fuzzy-регулятора в двухконтурной системе регулирования подачи пара в нагреватель, с коррекцией по температуре низа колонны. Данные, необходимые для расчета оптимальных параметров классических регуляторов данной АСР, были получены с действующего предприятия, где реализована рассматриваемая каскадная система.
Идея работы каскадных систем основана на том, что вспомогательная переменная у1 будет быстрее реагировать на управляющие и возмущающие воздействия, поступающие на объект регулирования. Дополнительный регулятор WР.СТ(s) называется стабилизирующим. Внешний регулятор вступает в работу при появлении на его входе ошибки регулирования основной регулируемой величины у. Но эта ошибка будет меньшей, т.к. мы заранее начали реагировать на поступление внешних воздействий с помощью наличия быстродействующей переменной у1 и стабилизирующего регулятора WР.СТ(s). Внешнему регулятору останется лишь скорректировать небольшие отклонения основной регулируемой величины у. Внешний регулятор WР.КОР(s) называется корректирующим регулятором [3].
Реализация данной системы на базе нечеткого и классического регуляторов выполнена в программном комплексе MatLab/Simulink, представлена на рисунках 1 и 2.
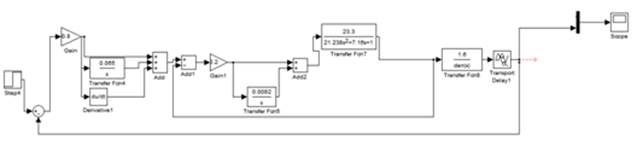
Рисунок 1. Модель каскадной системы регулирования с использованием классических регуляторов ( ПИ- и ПИД-)
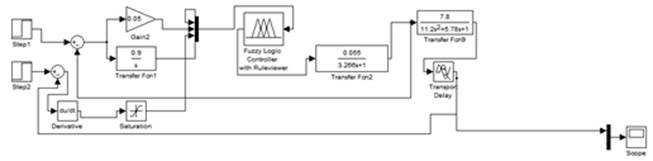
Рисунок 2. Модель каскадной системы регулирования с использованием нечеткого регулятора
Основная функция нечёткого регулятора ─ формирование выходного значения управления в зависимости от текущих координат системы.
Процедура обработки входной информации в регуляторе может быть описана следующим образом [5]:
-
текущие значения входных переменных преобразуются в лингвистические (фазификация);
-
на основании полученных лингвистических значений и с использованием базы правил контроллера производится нечёткий логический вывод, в результате которого вычисляются лингвистические значения выходных переменных;
-
дефазификация.
Разработка базы знаний нечёткого контроллера сводится к решению задач:
-
выбору входных лингвистических переменных на основе анализа поведения замкнутой системы регулирования в рассчитанном желаемом режиме;
-
назначению для каждой из лингвистических переменных набора лингвистических термов;
-
выбору для каждого из термов аппроксимирующего нечёткого множества.
Целью разработанной модели системы управления на базе нечёткого регулятора (контроллера) является задание значения пара на выходе регулятора по алгоритму, обеспечивающему поддержание требуемой температуры.
Для решения рассматриваемой задачи необходим нечёткий регулятор с тремя входами и одним выходом. Нечеткая система выполнена по типу Мамдани с тремя входными параметрами:
-
для пропорциональной;
-
интегральной;
-
дифференциальной составляющих.
Для лингвистического описания каждой входной переменной выбраны семь треугольных термов (NB, NM, NS, ZE, PS, PM, PB) и симметричные диапазоны изменения.
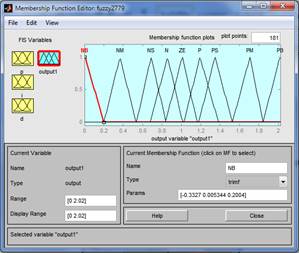
Рисунок 3. Термы выходных данных нечеткого регулятора
Для реализации алгоритма управления была создана универсальная программа формирования по имеющимся значениям матрицы базы знаний для нечёткого регулятора. Её работа состоит в следующем:
-
вызывается сохраненная матрица элементов;
-
определяются максимальные по модулю значения каждого из входов и выходов;
-
диапазон значений (от –max до +max) каждого входа и выхода разбивается на термы с шагом, заданным пользователем;
-
в зависимости от принадлежности значений переменных на каждом шаге к тому или иному терму формируются правила «вход – выход»;
-
правила, у которых при изменении входов выход не меняется, объединяются;
-
одинаковые правила объединяются;
-
в результате исполнения данного алгоритма образуется база правил нечёткого регулятора [1].
Правила формируются по типу «Если …и …, то». Фрагмент составленных правил изображен на рисунке 4.

Рисунок 4. Правила, используемые для построения переходного процесса fuzzy-регулятором
Построение переходных процессов и сравнительный анализ двух регуляторов произведен в дополнительном пакете Simulink (рисунок 5).
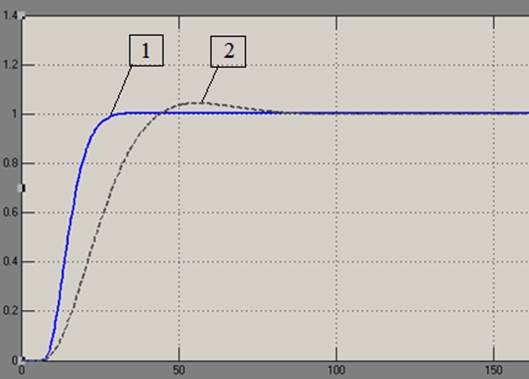
1 – Переходной процесс с использованием fuzzy-регулятора; 2 – Переходной процесс с использованием аналогового регулятора
Рисунок 5. Переходные процессы каскадной АСР с использованием регулятора на базе нечеткой логики и аналогового регулятора
Из рисунка 5 видно, что выход объекта управления системы с нечётким регулятором (c построенной автоматически базой правил) имеет меньшее перерегулирование, более эффективен по быстродействию и практически не имеет колебаний.
Заключение
Как показали результаты моделирования, при неизменных параметрах объекта регулирования системы с нечёткими регуляторами, реализованными на основе характеристик уже существующих систем, имеют лучшие динамические показатели по сравнению с классическими системами (рисунок 5).
В работе представлена возможность автоматизированного построения базы знаний для нечёткого логического контроллера. Использование программного метода построения базы знаний нечёткого контроллера позволило получить качественный переходный процесс для существующей системы.
Рецензенты:
Баширов М.Г., д.т.н., профессор, заведующий кафедрой ЭАПП филиала ФГБОУ ВПО УГНТУ в г. Салавате, г. Салават.
Жирнов Б.С., д.х.н., профессор, заведующий кафедрой ХТП филиала ФГБОУ ВПО УГНТУ в г. Салавате, г. Салават.
Библиографическая ссылка
Вильданов Р.Г., Бикметов А.Г., Самошкин А.И. МОДЕЛИРОВАНИЕ АВТОМАТИЧЕСКОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ С FUZZY-РЕГУЛЯТОРОМ // Современные проблемы науки и образования. 2014. № 4. ;URL: https://science-education.ru/ru/article/view?id=13483 (дата обращения: 17.06.2026).