



Введение
В последние годы в авиационной отрасли наблюдается возрастание интереса к созданию «полностью электрического самолета». Данный подход подразумевает замену гидравлического комплекса управления и в том числе электрогидравлических приводов, ставших традиционными исполнительными механизмами систем управления и стабилизации современных пассажирских, транспортных и боевых машин на электромеханический комплекс и приводы с электрическим энергопитанием [2].
Концепция большей электрификации бортовых систем управления и сокращение количества централизованных гидравлических энергосистем наиболее привлекательна для авиакомпаний, поскольку позволяет повысить их экономическую эффективность в части уменьшения затрат на обслуживание самолёта. В то же время уменьшение массы среднемагистрального и дальнемагистрального самолёта, достигаемое за счет сокращения централизованных гидросистем, позволяет увеличить полезную нагрузку, снизив топливные затраты. Кроме того, современное и дальнейшее развитие авиации, в том числе пассажирской и транспортной, обуславливает все более активное использование аэродинамических малоустойчивых и в перспективе неустойчивых компоновок. Внедрение таких схем обеспечивает ряд преимуществ, получая следующие положительные эффекты:
- Увеличивается суммарная подъемная сила, т.к. балансировочная подъемная сила на стабилизаторе в этом случае направлена вверх и складывается с подъемной силой на крыле;
- Увеличивается примерно на 10 %
 самолета.
самолета.
Применение малоустойчивых аэродинамических компоновок для пассажирских самолётов увеличит допустимую коммерческую нагрузку и снизит расход топлива. Поскольку пилотирование самолёта с неустойчивой или мало устойчивой компоновками требует использования автоматических систем улучшения его устойчивости и управляемости, то к исполнительным рулевым приводам предъявляется ряд особых требований по части обеспечения высоких динамических характеристик и отказобезопасности. Это обстоятельство не позволяет полностью отказаться от гидравлических энергосистем.
Сохранение части централизованных гидросистем на современных, даже «более электрических» самолетах (Airbus A-380, Airbus A-400М) вызвало появление так называемых гибридных электрогидравлических рулевых приводов. Основополагающей идеей создания такого привода стало объединение в одной конструкции классического привода с дроссельным регулированием скорости и питанием от централизованной гидросистемы, а также автономного гидропривода с питанием от электросети самолета. Силовой гидроцилиндр является общим, и оба этих привода поочередно работают на единственный гидроцилиндр. Этот подход позволяет осуществить разнородное резервирование комплекса управления, что без сомнения повышает его уровень безотказности.
Такие конструкции на основе использования электрогидростатического автономного привода уже применяются на самолетах фирмы Airbus (рулевые приводы типа EBHA). Однако, несмотря на очевидные положительные качества, современным гибридным приводам типа ЕВНА присущ ряд существенных недостатков:
- Низкая, относительно приводов с дроссельным регулированием, удельная мощность, обуславливаемая дополнительным весом мехатронного модуля, насоса и других компонентов. Энергоотдача электрогидростатического авиационного привода мощностью 4,5…8 кВт составляет 115…168 Вт/кг без учета веса электронного блока управления, и 78…118 Вт/кг с учетом веса этого блока [4].
- Худшие по сравнению с традиционными электрогидравлическими приводами динамические характеристики в области малых сигналов управления (0,25…5 % от максимального сигнала) при работе от электрического энергетического канала.
- Уменьшенная по сравнению с дроссельными приводами динамическая жесткость при работе от электрического энергетического канала.
- Более узкая полоса пропускания привода в автономном режиме работы, вызванная инерционностью нагруженного электродвигателя мехатронного модуля [4].
Перечисленные выше недостатки приводов типа ЕВНА, за исключением низкой удельной мощности, являются наследственными недостатками электрогидростатического принципа передачи энергии от электродвигателя на выходное звено привода.
В лаборатории гидроприводов кафедры №702 МАИ под руководством Селиванова А.М. в течение ряда лет велась научно-исследовательская работа по созданию перспективных схемных решений автономных и гибридных рулевых электрогидравлических приводов, в которых минимизировались или устранялись полностью указанные выше недостатки. Таким решением является автономный электрогидравлический рулевой привод с комбинированным регулированием скорости выходного звена [5,6,7].
Гибридные приводы с комбинированным регулированием скорости выходного звена в автономном канале являются перспективным решением в качестве рулевого привода «более электрического самолета» с точки зрения динамических свойств, применения разнородного резервирования энергетических каналов и гибкости настройки, однако, в настоящее время эти приводы изучены недостаточно для их серийного производства и промышленного применения. В частности, слабо исследована работа привода под нагрузкой, режимы переключения энергетических каналов, слабо изучено влияние параметров настройки блока управления привода на его характеристики. В связи с этим проблема исследования автономных электрогидравлических приводов является актуальной и острой для современной авиационной промышленности.
Цель исследования
Целью исследования является определение взаимосвязей между параметрами настройки блока управления автономного электрогидравлического привода с комбинированным регулированием скорости выходного звена и показателями рабочих процессов в зоне малых входных сигналов (0.25–5 %) и оценка динамических характеристик привода при работе под нагрузкой.
Методы исследования
Для решения поставленных задач использовались основы теории гидравлических процессов в гидравлических машинах и гидроприводах и имитационное математическое моделирование в среде MatLab.
Основные результаты
Ключевой особенностью привода с комбинированным регулированием скорости по сравнению с другими типами гидравлических приводов является улучшение динамических характеристик в зоне малых входных сигналов. Данный факт обуславливается тем, что в зоне малых амплитуд сигналов рассогласования привод автоматически переходит на режим более точного и динамичного преимущественно дроссельного регулирования скорости выходного звена, реализуемого за счет управления клапаном реверса. Проведенные исследования показали, что наблюдаемый эффект в большей степени зависит от настройки блока управления привода. Настройка работы клапана в базовой схеме привода [8] формализуется несколькими параметрами, среди которых относительный диапазон регулирования клапана реверса (ОДРК), начальное напряжение на мехатронном модуле и начальное давление на входе клапана реверса. Исследования показали, что настройка ОДРК является одной из ключевых для такого привода, при этом оценка влияния данной настройки на динамические свойства привода была изучена недостаточно [1].
В связи с особенностями принципа комбинированного регулирования скорости, обеспечивающего улучшение характеристик привода в области малых амплитуд входных сигналов, наиболее информативным и детализированным способом представления результатов исследования является трехмерные графики координат состояния привода, такие как амплитудные и фазочастотные характеристики, показанные в зависимости от амплитуды управляющего сигнала (Ain). На рисунках 1 и 2 показаны графики АФЧХ привода, полученные для частных значений ОДРК равных 0.2 и 0.6. Исследования показали, что эффект улучшения характеристик привода в области малых входных сигналов падает с увеличением значения коэффициента ОДРК выше 0.7. Кроме того, диапазон амплитуд входных сигналов, где наблюдается указанный эффект при базовом варианте схемы [6], не превышает 5 % от максимального значения управляющего сигнала.
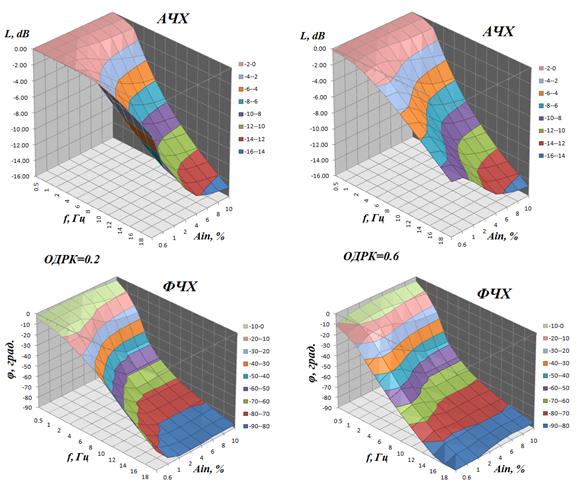
Рисунок 1. АФЧХ автономного электрогидавлического рулевого привода с комбинированным регулированием скорости при настройке относительного диапазона регулирования клапана реверса ОДРК=0.2 и 0.6
Стоит отметить, что на диапазон амплитуд входных сигналов существенное влияние оказывает величина начального напряжения на мехатронном модуле Uno или же связанная с ней величина начального давления питания клапана реверса (для приведенных результатов уровень начального давления принимался равным 50 атм.).
Автономный рулевой привод с комбинированным регулированием скорости выходного звена в зависимости от уровня сигнала рассогласования и алгоритмов настройки работает в трех режимах: преимущественно дроссельный режим регулирования скорости, комбинированный режим регулирования скорости и преимущественно электромоторный режим. Известная ранее методика определения режимов работы привода давала представление о преимущественном способе регулирования скорости привода с точки зрения энергетики, исходя из потерь давления на клапане реверса. Однако данный способ не позволяет получить качественную оценку областей регулирования скорости выходного звена привода без дополнительных изменений конструкции привода, необходимых для подключения датчиков перепада давления и трудоемкого эксперимента.
В связи с указанными выше особенностями, автором предложено оценивать закономерность изменения режимов преимущественного регулирования скорости привода при отработке гармонических сигналов исходя из его частотных характеристик. В первую очередь станет возможно без дополнительных технических модификаций исследуемых образцов приводов и каких-либо дополнительные сводных данных получать сведения о режимах работы. Кроме того, это позволяет дать оценку качественного влияния параметров настройки привода на его частотные характеристики, что является ключевой задачей.
Для оценки режимов преимущественного регулирования скорости было введено понятие качества динамического процесса при отработке приводом гармонического сигнала. Под данным понятием принимается соотношение (см. рис. 2):
 (1)
(1)
Где![]() – частота гармонического сигнала вида
– частота гармонического сигнала вида![]() ,
,![]() – фазовое запаздывание.
– фазовое запаздывание.
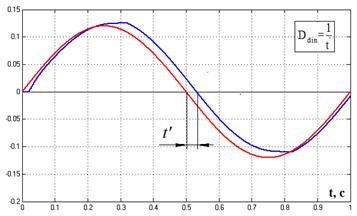
Рисунок 2. Качество динамического процесса
Для исследуемого привода была преобразована известная фазовая частотная характеристика, полученная для различных значений ОДРК. При анализе полученных результатов было установлено, что на трехмерных графиках состояния привода, по осям которых представлены диапазон амплитуд входных сигналов, полоса частот и показатель качества динамического процесса, можно выделить две области, соответствующих преимущественно дроссельному и преимущественно электромоторному типу регулирования скорости выходного звена (см. рис. 3). Область "1" соответствует преимущественно дроссельному регулированию скорости, область "2" – преимущественно электромоторному регулированию скорости выходного звена, область "3" – комбинированному регулированию скорости. Граница перехода между областями 2 и 3 показана условно.
Это означает, что предложенный способ оценки позволит определить области, где возможно качественное улучшение динамических характеристик привода за счет изменения параметров ОДРК, Unoи Ро и степень влияния каждого из этих параметров. Например, в областях, где регулирование скорости носит преимущественно электромоторный характер, изменение настройки ОДРК окажет малое влияние на динамические характеристики привода в целом, в то время как в областях преимущественно дроссельного регулирования такая настройка может дать существенное улучшение характеристик без изменения остальных параметров.
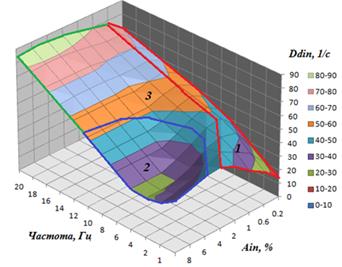
Рисунок 3. Трехмерное представление областей преимущественного регулирования скорости выходного звена привода
Стоит отметить, что важнейшим показателем рулевого привода является качество динамических характеристик при работе под нагрузкой. При математическом моделировании автономного электрогидравлического рулевого привода с комбинированным регулированием скорости выходного звена была выявлена деградация динамических характеристик под нагрузкой. Оценка динамических свойств производилась для трех различных уровней нагрузки, соответствующих 20 %, 40 %, 60 % от максимального усилия, развиваемого приводом Fmax. При этом величины до 40 % от Fmax соответствуют реальным балансировочным нагрузкам рулевых приводов для пассажирских и транспортных ЛА.
Анализ полученных результатов показал, что при нагружении автономного электрогидравлического привода с комбинированным регулированием скорости указанные процессы приводят к резкому сокращению области преимущественно дроссельного регулирования и соответствующему ухудшению динамических характеристик привода в зоне малых входных сигналов (см. рис. 4).
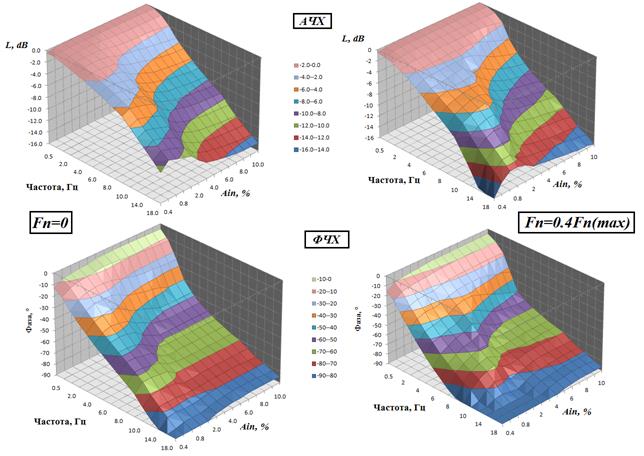
Рисунок 4. Деградация частотных характеристик привода под нагрузкой
В зоне малых амплитуд входных сигналов (до 5 %) и диапазоне частот до 10 Гц наблюдается существенное (до 80 % или 4 дБ) ухудшение амплитудной характеристики и (до 35 % или до 25 °) ухудшение фазовой характеристики. При этом данный эффект наблюдается при нагрузках до 40 % от максимальной, соответствующих возможным балансировочным моментам пассажирских ЛА.
Эффект деградации характеристик при работе под нагрузкой вызван сокращением области преимущественно дроссельного регулирования скорости, за счет уменьшения величины перепада давления на клапане реверса, вызванного этим нагружением. На кафедре 702 МАИ автором разработано специальное техническое решение, позволяющее путем незначительных модификаций базовой схемы привода, а именно – включения датчиков перепада давления, и соответствующей настройки блока управления, улучшить динамические характеристики привода в области малых (до 5 %) амплитуд входных сигналов при работе под нагрузкой, расширив при этом диапазон преимущественно дроссельного регулирования скорости в соответствии с требуемыми условиями работы.
Выводы
1. Трехмерное графическое представление областей преимущественного способа регулирования скорости выходного звена, получаемое на основании фазочастотных характеристик привода, позволяет осуществлять предварительную настройку блока управления в соответствии с требованиями к динамическим характеристикам привода. В результате исследования определено качественное влияние параметров настройки базовой схемы автономного электрогидравлического рулевого привода с комбинированным регулированием скорости на его динамические характеристики и получены рекомендации по настройке параметров блока управления.
2. Для эффективной оценки влияния настроек блока управления приводом на его динамические свойства необходимо одновременно оценивать несколько координат состояния, таких как начальное давление на клапане реверса Po, начальное напряжение на входе мехатронного модуля Uno, значение коэффициента настройки относительного диапазона регулирования клапана реверса ОДРК, величину входной нагрузки Fn. С этой точки зрения для решения задачи выбора настроек рекомендуется использовать трехмерные частотные характеристики как наиболее детализированный способ представления особенностей данного типа приводов и оценки многопараметрического влияния настройки блока управления приводом на его динамические характеристики.
3. При нагружении автономного гидравлического привода с комбинированным регулированием скорости происходит сокращение области дроссельного регулирования скорости выходного звена и, как следствие, ухудшение его фазочастотных характеристик, особенно в области малых амплитуд входных сигналов. Для улучшения динамических свойств автономного электрогидравлического рулевого привода с комбинированным регулированием скорости в широком диапазоне эксплуатационных нагрузок и управляющих сигналов необходима разработка нового схемотехнического и конструкторского решения построения системы регулирования.
Рецензенты:
Ермаков С.А., д.т.н., профессор ФГБОУ ВПО Московский авиационный институт (национальный исследовательский университет), г. Москва.
Самсонович С.Л., д.т.н., профессор ФГБОУ ВПО Московский авиационный институт (национальный исследовательский университет), г. Москва.
Библиографическая ссылка
Алексеенков А.С. ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК И РАБОЧИХ ПРОЦЕССОВ АВТОНОМНОГО ЭЛЕКТРОГИДРАВЛИЧЕСКОГО РУЛЕВОГО ПРИВОДА С КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ // Современные проблемы науки и образования. 2014. № 2. ;URL: https://science-education.ru/ru/article/view?id=12896 (дата обращения: 29.06.2026).