



Введение
Целью работы являлось создание имитационной модели работы электрического дифференциала с микропроцессорным управлением и отладка их на испытательном стенде для последующей апробации на ходовом макете транспортного средства с электрической трансмиссией
Дифференциал — это механическое устройство, которое делит момент входного вала между выходными валами непосредственно связанные с ведущими колёсами. Необходимость применения дифференциала в конструкции автомобилей обусловлена следующим фактом - внешнее колесо при повороте проходит более длинное расстояние по дуге, чем внутреннее. То есть при вращении ведущих колёс с одинаковой скоростью поворот возможен только с пробуксовкой, что негативно сказывается на управляемости и повышает износ шин.
Основное назначение дифференциала:
- позволяет ведущим колёсам вращаться с разными угловыми скоростями;
- неразрывно передаёт крутящий момент от двигателя на ведущие колёса;
- в сочетании с главной передачей служит дополнительной понижающей передачей.
Наиболее широко дифференциал применяется в конструкции привода автомобилей, где момент от выходного вала коробки передач (или карданного вала) поровну делится между полуосями правого и левого колеса. В полноприводных автомобильных транспортных средствах (АТС) также может применяться для деления момента в заданном соотношении между ведущими осями, но следует отметить, что для решения этой технической задачи распространены конструкции и без дифференциала (например, с вискомуфтой).
Усложнение экологической ситуации в крупных городах, ограниченность энергетических ресурсов стимулируют научно-технический прогресс в области энергоэффективного транспорта. В автомобильной промышленности активно развиваются следующие параллельные направления: электронакопительные транспортные средства (АТС с комбинированными (гибридными) энергетическими установками (КЭУ) и электромобили), рациональное использование электроэнергии для бортовых устройств за счет повышения энергоэффективности электроприводов[1] и внедрения интеллектуальных алгоритмов управления. Применение интеллектуальных MOSFET ключей в системах коммутации и защиты потребителей с диагностическими функциями, обладающие малыми динамическими потерями, позволяют реализовывать управление при помощи широтно-импульсной модуляции (ШИМ) и реализовывать плавное регулирование нагрузкой потребителей в точном соответствии с требуемыми параметрами систем АТС.
В общем виде на электрическом транспортном средстве могут быть применены различные схемы использования электрической трансмиссии. С точки зрения применения дифференциала можно упростить до принципиальных схем приведенных ниже (рис.1.). На рис.1.а. показан вариант использования электрической трансмиссии с одним мощным электродвигателем. Современный энергоэффективный электропривод принципиально невозможен без микроконтроллерной системы управления с использованием силовой электроники применение которой позволяет гибко обеспечивать практически любые режимы его работы, необходимые для АТС. Применение независимых приводных электродвигателей на каждую ведущую полуось (реже колёса) позволяет решить задачу прохождения колёсами разных длин дуг при повороте при помощи системы управления и отказаться от механического дифференциала с фиксированными характеристиками. В такой конфигурации характеристики «электрического дифференциала» могут быть любыми, адаптироваться и изменять свои характеристики в зависимости от погодных условий, потребностей водителя или изменения дорожных условий. Реализация адаптивных алгоритмов работы с «электрическим дифференциалом» возможна по схеме показанной на рис.1,б. В случае применения независимых электродвигателей для всех колёс (полный привод), возможна реализация активных систем безопасности за счёт прямого моментного управления, что в конечном итоге позволит повысить безаварийность или снизить ущерб от ДТП, в том числе здоровью людей.
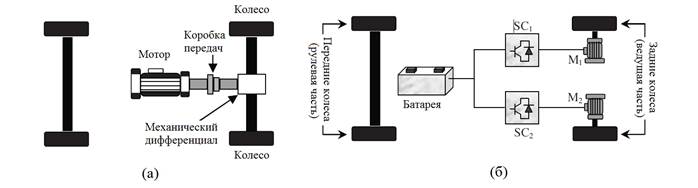
Рис. 1.Схема автомобиля с одним центральным мотором и механическим дифференциалом (а), и двумя независимыми моторами (б).
В случае реализации функции дифференциала система управления автомобиля должна формировать управляющие воздействия (тем самым изменяя скорость или момент на колёсах) опираясь на показания датчиков, которые однозначно определяют условия движения АТС.
При проведении исследований и расчётов была изучена и построена модель движения транспортного средства, на основании которой был создан алгоритм работы системы управления и проводилась проверка его работоспособности (рис.2).
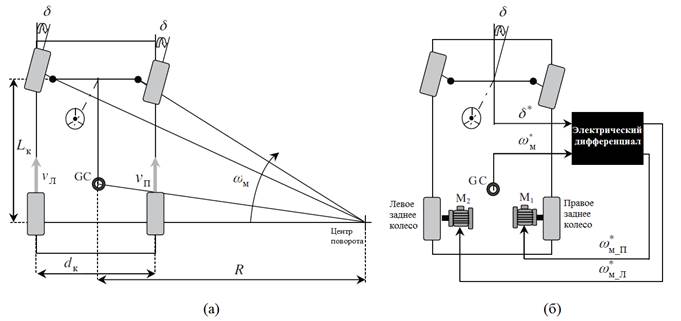
Рис.2. модель автомобиля, входящего в поворот (а), и модель электрического дифференциала (б)
Для расчета модели движения и корректировки модели в процессе испытаний применялись следующие формулы и зависимости [3]:
![]() ,
, ![]() - - скорость левого и правого колеса определяется по формулам (1) и (2):
- - скорость левого и правого колеса определяется по формулам (1) и (2):
![]() (1)
(1)
![]() (2)
(2)
где ![]() - угловая скорость машины,
- угловая скорость машины, ![]() - ширина колеи, R –радиус поворота.
- ширина колеи, R –радиус поворота.
Радиус, по которому будет поворачивать АТС в зависимости от колёсной базы и угла поворота колёс, вычислялся по формуле (3):
![]() (3)
(3)
где ![]() - длина колесной базы АТС,
- длина колесной базы АТС, ![]() - угол поворота колёс.
- угол поворота колёс.
Угловая скорость ведущих колёс с электрическим дифференциалом вычисляется по формулам (4) и (5), а разница между их числом оборотов в минуту соответственно по формуле (6):
 (4)
(4)
 (5)
(5)
![]() (6)
(6)
где ![]() ,
, ![]() - угловая скорость ведущих заднего левого колеса и правого колес соответственно[2],
- угловая скорость ведущих заднего левого колеса и правого колес соответственно[2],
При этом в разработанных алгоритмах управления было принято, что если ![]() АТС совершает поворот вправо,
АТС совершает поворот вправо, ![]() движется прямолинейно,
движется прямолинейно, ![]() поворачивает налево.
поворачивает налево.
Динамика движения АТС рассчитывается исходя из сил, действующих на него в данный момент времени по формулам (8-11):
![]() (8)
(8)
![]() (9)
(9)
![]() (10)
(10)
![]() (11)
(11)
где ![]() - итоговая сила,
- итоговая сила, ![]() - сила трения,
- сила трения, ![]() - сила сопротивления воздуха,
- сила сопротивления воздуха, ![]() - сила тяжести действующая на АТС, находящемся на дороге с уклоном (препятствует или помогает движению в зависимости от направления уклона относительно движения- подъем или спуск), GС – центр масс
- сила тяжести действующая на АТС, находящемся на дороге с уклоном (препятствует или помогает движению в зависимости от направления уклона относительно движения- подъем или спуск), GС – центр масс
Одной из задач являлось создание централизованной системы управления, которая смогла бы на основе данных о скорости, положении руля и педали газа логически управлять ведущими колесами, имитируя работу дифференциала и изменяя его настройки в зависимости от дорожных условий и погоды.
Для визуального представления работы, была составлена функциональная схема информационной вычислительной системы при помощи программы ERWIN Process Modeler. Данная программа строит модели систем по методологии IDEF[3], предназначенной для рассмотрения логических отношений между функциями, а не их временную последовательность. Разработанная функциональная схема представлена на Рис. 3.
В трансмиссии автомобиля может быть использован любой тип электрического двигателя (ЭД) со специфичными техническими характеристиками, но алгоритм работы должен быть универсальным.
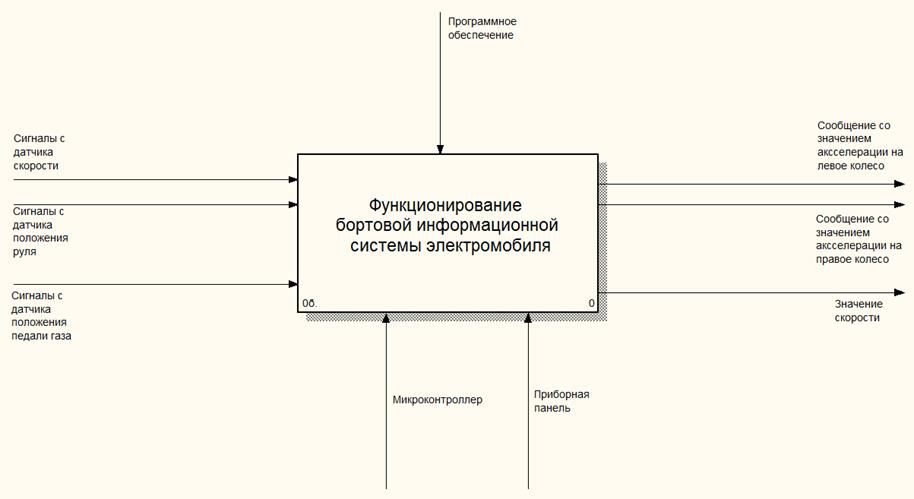
Рис. 3. Функциая схема работы электрического дифференциала.
Влияние на работу электрического дифференциала оказывает:
- степень нажатия педали газа, степень нажатия которой изменяется в процентах от 0 до 100%;
- угол поворота руля (пересчитываемый на конечный угол поворота колёс)[4];
- центробежная сила (боковое ускорение), которая появляется в результате входа автомобиля в поворот и вычисляется на основании данных от датчика ускорения.
В качестве выходных данных была принята частота вращения, измеряемая в процентах, подаваемая на каждое колесо. При реализации токового контура в силовых инверторах управления электродвигателями выходными данными также будут являться момент ЭД. Имитационная модель, встроенная в программное обеспечение обрабатывает данные и выводит значения для управления электрическим дифференциалом, при которых АТС плавно входит в поворот. В случае появления проскальзывания, излишнего бокового ускорения система пытается скорректировать движение для сохранения траектории в рамках своих возможностей.
После проведенных работ была составлена электрическа схема и была смоделирована работа отдельных узлов. После чего разработанна уточненная функциональная схема работы электрического дифференциала с электронным управлением (рис.3).
Задачи по расчету показателей и обработке данных, формированию управляющих воздействий осуществляет микроконтроллер. Входными данными являются электрические сигналы, приходящие с датчиков, выходными – сообщения, посылаемые по CAN шине к силовым блокам управления электродвигателями с постоянными магнитами, и выводимое на приборную панель значение скорости. Соблюдение выполнения задач и функций реализованно за счет отлаженного и скорректированного программного обеспечения, записанного в память микроконтроллера.
Для отладки алгоритмов, поиска проблемных узлов, настройки и отладки совместной работы основных узлов электрического дифференциала с микропроцессорным управлением был разработан макетный стенд.
Основными компонентами стенда стали:
- 2 электродвигателя постоянного тока мощностью около 110 Вт, с установленными на вал зубчатыми колёсами с датчиком скорости АБС от автомобиля Lada Kalina;
- 2 импульсных регулятора входными токами и напряжениями ЭД на основе интеллектуальных ключей собранных по полумостовой схеме;
- встраиваемый модуль с микроконтроллером Texas Instruments TE-TMS320F28335;
- плата задатчиков и моделирования сигналов датчиков;
- источники питания, жгуты и различные переходники.
На испытательном стенде были смоделированы основные алгоритмы работы и произведена корректировка программного обеспечения по результатам испытаний. В частности, в ходе испытаний, была выявлена проблема получения ложной информации с датчиков. С это целью в программу был разработан и введен модуль фильтрации данных.
Значение напряжения, приходящих с аналоговых датчиков, может колебаться в больших пределах из-за электромагнитных наводок и погрешностей самих датчиков. Эти сигналы необходимо каким-либо образом выделить и защитить от помех. Кроме применения кабелей с двойным экраном был использован цифровой математический фильтр, который был реализован в виде программы для микроконтроллера.
Для решения задачи необходим фильтр, который учитывал бы все предыдущие погрешности и на их основе делал предсказание величины в следующий дискретный момент времени, поэтому был выбран фильтр Калмана [2].
Фильтр Калмана использует динамическую модель системы, известные управляющие воздействия и множество последовательных измерений для формирования оптимальной оценки состояния. Алгоритм состоит из двух повторяющихся фаз: предсказание и корректировка. На первой фазе рассчитывается предсказание состояния в следующий момент времени. На втором этапе новая информация с датчика корректирует предсказанное значение. Оба этапа происходят с учетом неточности измерения.
В общем виде представление фильтра Калмана записывается следующей системой уравнений:
![]() (12);
(12);
![]() (13),
(13),
где ![]() – предсказание состояния системы в текущий момент времени,
– предсказание состояния системы в текущий момент времени, ![]() – матрица перехода между состояниями,
– матрица перехода между состояниями, ![]() – состояние системы в прошлый момент времени,
– состояние системы в прошлый момент времени, ![]() – матрица применения управляющего воздействия,
– матрица применения управляющего воздействия, ![]() – управляющее воздействие в прошлый момент времени,
– управляющее воздействие в прошлый момент времени, ![]() – предсказание ошибки,
– предсказание ошибки, ![]() – ошибка в прошлый момент времени,
– ошибка в прошлый момент времени, ![]() – ковариация шума процесса.
– ковариация шума процесса.
Формулы корректировки выглядят следующим образом:
![]() (14);
(14);
![]() (15);
(15);
![]() (16),
(16),
где ![]() – усиление Калмана,
– усиление Калмана, ![]() – матрица измерений,
– матрица измерений, ![]() – ковариация шума измерения,
– ковариация шума измерения, ![]() – измерение в текущий момент времени,
– измерение в текущий момент времени, ![]() – рассчитанное состояние системы в текущий момент времени,
– рассчитанное состояние системы в текущий момент времени, ![]() – матрица идентичности.
– матрица идентичности.
Представленные большими буквами переменные представляют собой матрицы различной размерности, зависящей от количества входов и выходов фильтра.
Критичными для помех данными стали с потенциометрических датчиков положения руля и педали газа. Входные данные должны быть связаны между собой в одной системе и влиять друг на друга, в нашем же случае положение педали газа не зависит от положения руля, или зависит настолько незначительно, что им можно пренебречь. Поэтому было принято решение создать два отдельных экземпляра фильтра, которые будут по отдельности фильтровать каждый поток данных. Для данной задачи фильтры имеют всего один вход и один выход, а следовательно матрицы сводятся к обычным скалярным переменным, что упрощает расчёты. Для наглядности эти переменные записаны маленькими буквами (17-21).
![]() (17)
(17)
![]() (18)
(18)
![]() (19)
(19)
![]() (20)
(20)
![]() (21)
(21)
Для того, чтобы настроить фильтр, необходимо задать переменные ![]() ,
,![]() ,
, ![]() ,
, ![]() и
и ![]() , которые задают динамику системы и измерений, а также определяют параметры сглаживания. Покажем настройку системы измерений на примере положения педали газа.
, которые задают динамику системы и измерений, а также определяют параметры сглаживания. Покажем настройку системы измерений на примере положения педали газа.
![]() – переменная, описывает динамику системы. На динамику в нашем случае не оказывается влияния, так как педаль газа не изменяется со временем и может равновероятно оказываться в любом положении. Поэтому
– переменная, описывает динамику системы. На динамику в нашем случае не оказывается влияния, так как педаль газа не изменяется со временем и может равновероятно оказываться в любом положении. Поэтому ![]() .
.
![]() – переменная, определяющая применение управляющего воздействия. Было принято, что положение педали газа не зависит от положения руля. Поэтому внешними воздействиями можно пренебречь,
– переменная, определяющая применение управляющего воздействия. Было принято, что положение педали газа не зависит от положения руля. Поэтому внешними воздействиями можно пренебречь, ![]() .
.
![]() – ошибка измерения. Может быть определена путем испытаний датчиков, после серии экспериментов и вычислений было эмпирически получено, что наилучший результат достигается при
– ошибка измерения. Может быть определена путем испытаний датчиков, после серии экспериментов и вычислений было эмпирически получено, что наилучший результат достигается при ![]() .
.
![]() – шум процесса. При испытаниях на стенде было установлено, что наилучшие результаты получаются при
– шум процесса. При испытаниях на стенде было установлено, что наилучшие результаты получаются при ![]() .
.
![]() – матрица наблюдаемости. В матричном представлении показывает соотношение между измерениями и действительным состоянием системы. Определитель матрицы должен быть равен единице, поэтому, в нашем случае с одной переменной,
– матрица наблюдаемости. В матричном представлении показывает соотношение между измерениями и действительным состоянием системы. Определитель матрицы должен быть равен единице, поэтому, в нашем случае с одной переменной, ![]() должно принимать значение 1.
должно принимать значение 1.
После произведенных изменений формулы принимают вид (22-26):
![]() (22);
(22);
![]() (23).
(23).
![]() (24);
(24);
![]() (25);
(25);
![]() (26).
(26).
На вход фильтра Калмана подается значение ![]() , а на выход -
, а на выход - ![]() .
.
Ниже приведен пример реализации фильтра Калмана в виде функции на языке C++:
float xkp=1.0, xkminus1=1.0, Kk=1.0, Pkminus1=1.0, Pk=1.0, Pkp=1.0, xk=1.0;
int F=1, H=1, R=100; float Q=1;
float kalman (float q)
{
xkp=F*xkminus1;
Pkp=F*Pkminus1*F+Q;
Kk=(Pkp*H)/(H*Pkp*H+R);
xk=xkp+Kk*(q-H*xkp);
Pk=(1-Kk*H)*Pkp;
xkminus1=xk;
Pkminus1=Pk;
return xk;
}
Функция принимает на вход значение q, являющимся измерением в данный момент. После произведенных вычислений функция возвращает число xk, представляющим собой рассчитанное состояние системы в данный момент времени.
Введение данного модуля позволило решить проблему и обеспечить надёжную работу. Необходимо учитывать, что испытания проводились на лабораторном стенде и при переносе системы на ходовой макет транспортного средства с задним приводом алгоритмы и программное обеспечение, скорее всего, будут скорректированы. Также на первом этапе из алгоритмов была исключена информация о данных с датчика ускорения для упрощения отладки и поиска неисправностей. Авторы, тем не менее, считаю, что он необходим и планируют исследовать работоспособность системы и с датчиком ускорения после всесторонних испытаний и отладки данного алгоритма на реальном объекте. На данный момент система электрического дифференциала с электронным управлением установлена на ходовом макете АТС с электрической трансмиссией Formula Electric, разработанный студентами МАДИ в рамках международной образовательной инженерной серии. На данном АТС планируется продолжить исследования.
Заключение
Для осуществления инициализации периферийных устройств и формирование управляющих воздействий, был разработан алгоритм функционирования электрического дифференциала, создано программное обеспечение для микроконтроллера TMS320F28335, позволяющее производить сбор и обработку данных с датчиков скорости, положения руля и педали газа. Для проведения испытаний был разработан испытательный стенд с использованием блоков управления электродвигателями постоянного тока с интеллектуальными ключами на основе MOSFET транзисторов, управляемых посредством отправки сообщений по шине CAN от платы управления. На стенде были проведены испытания, установлено влияние помех на сигналы с датчиков, которые были решены при помощи реализации цифрового фильтра Калмана.
Были проведены испытания и произведена корректировка алгоритмов и программного обеспечения по результатам испытаний.
Рецензенты:
Сидоров Б.Н., д.т.н. профессор, профессор кафедры «Электротехника и электрооборудование», ФГБОУ ВПО «Московский автомобильно-дорожный государственный технический университет (МАДИ)», г.Москва.
Марсов В.И., д.т.н., профессор, профессор кафедры «Автоматизация производственных процессов», ФГБОУ ВПО ФГБОУ ВПО «Московский автомобильно-дорожный государственный технический университет (МАДИ)», г.Москва.
[1] при номинальном напряжении 12 В
[2]Прикладная задача была рассмотрена для заднеприводного автомобиля
[3] Позволяет отображать и анализировать модели деятельности широкого спектра сложных систем в различных разрезах. При этом широта и глубина обследования процессов в системе определяется самим разработчиком, что позволяет не перегружать создаваемую модель излишними данными [1]
[4] для прикладной задачи поворот рулевого колеса в обе стороны был выбран угол равный 330°
Библиографическая ссылка
Голубчик Т.В., Феофанова Л.С., Феофанов С.А., Лазарев Д.Б., Насибулов И.Р. РАЗРАБОТКА АЛГОРИТМОВ РАБОТЫ ЭЛЕКТРИЧЕСКОГО ДИФФЕРЕНЦИАЛА С МИКРОПРОЦЕССОРНЫМ УПРАВЛЕНИЕМ С ИСПОЛЬЗОВАНИЕМ ИНТЕЛЛЕКТУАЛЬНЫХ КЛЮЧЕЙ // Современные проблемы науки и образования. 2014. № 2. ;URL: https://science-education.ru/ru/article/view?id=12366 (дата обращения: 29.06.2026).