



Введение
Существует тенденция замены электромеханических устройств на электронные. Для проведения адекватного анализа необходимо провести расчет статических и динамических потерь в системе защиты и коммутации в бортовой сети автомобиля. В статье рассматриваются особенности расчета для различных типов потребителей электроэнергии, а также рассматриваются вопросы расчета в цепях, содержащих индуктивную нагрузку.
Основная часть
Общие потери мощности ключа состоят из потерь на проводимость и потерь на переключение. Параметр Rds(on) МОП-транзистора определяет стоимость кристалла, которая пропорциональна площади. С целью сравнительной оценки введем два качественных показателя (П1 и П2):
![]()
![]()
Сначала определим потери на проводимость и соответственно потери на управление, далее следует определить потери на переключение. В случае синхронного понижающего преобразователя П1 подходит для ключей нижнего уровня, а П2 для ключей верхнего уровня.
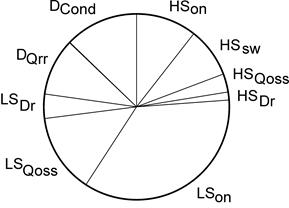
Пример того, как распределяются потери в МОП-транзисторе при частоте 300 кГц (рис. 1):
LSon – потери на проводимость в ключе нижнего уровня;
LSQoss – потери на заряд емкости на выходе ключа нижнего уровня;
Dcon потери на проводимость в корпусном диоде;
DQrr – потери на восстановление диода проявляются как Irr протекающий через ключ верхнего уровня
HSon – потери на проводимость в ключе верхнего уровня;
HSsw – потери на переключение в ключе верхнего уровня.
 .
.
Рис. 1. Распределение потерь мощности в ключе
Данная диаграмма верна для частот до 300 кГц. Повышение частоты приводит к тому, что потери на переключение становятся более значимыми. Также увеличивается значение потерь, связанных с управлением затвором (LSDr и HSDr).
При подборе МОП-транзистора необходимо учитывать следующие параметры, влияющие на потери.
- маленькое сопротивление Rds(on) приводит к снижению потерь на проводимость;
- маленькое Qg снижает потерь на управление;
- маленькое Qgd снижает потери на переключение.
Потери мощности (Pl) в любом элементе, работающем в режиме переключения, могут быть разделены на три группы:
1) потери на электропроводность диэлектрика (Pc);
2) потери на переключение (Psw);
3) потери на утечки (Pb), обычно незначительные.
Следовательно:
Pl=Pc+Psw+Pb≈Pc+Psw
В этой статье мы рассмотрим только потери на электропроводность диэлектрика, т.е. статические потери, так как с них следует начинать расчет.
Потери на электропроводность диэлектрика силового МОП транзистора могут быть рассчитаны с применением аппроксимации с сопротивление сток-истока (RDSon):
uDS(iD)=RDSon(iD) iD,
где – uDS и iD являются напряжением сток-истока и током стока, соответственно. Типичное сопротивление RDSon может быть получено из диаграмм, указанных в технической документации на интеллектуальный ключ, пример показан на рис 2, где ID ток МОП транзистора в открытом состоянии, определяется исходя из необходимого для потребителя электроэнергии тока.
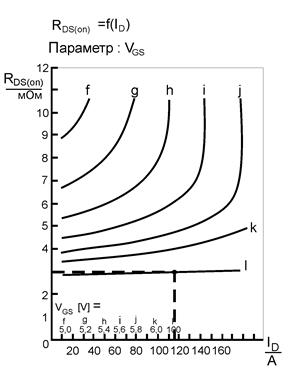
Рис. 2. Сопротивление сток-исток как функция тока стока (при TJ=25°C)
Следовательно, мгновенные значения потерь на электропроводность МОП-транзистора могут быть определены как:
![]()
Интегрирование значения мгновенных потерь мощности во всём цикле даёт среднее значение потерь на электропроводность МОП-транзистора:
![]()
где IDrms является среднеквадратичным значением тока МОП транзистора в открытом состоянии.
Потери на электропроводность распараллеливающего (anti-parallel) диода могут быть оценены с применением диода аппроксимации, последовательно соединенного с источником постоянного напряжения (uD0), представляющего собой диод в открытом состоянии при нулевом напряжении, и диод в открытом состоянии с сопротивлением (RD), где uD – напряжение в диоде, а iF – ток в диоде:
![]()
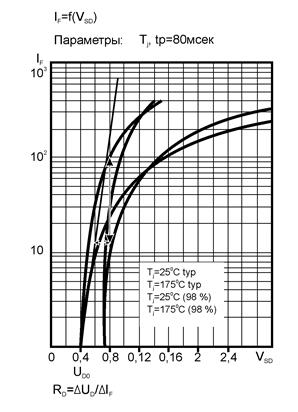
Рис. 3. Сопротивление диода как функция от тока диода
Необходимые параметры могут быть получены из диаграмм в справочниках, пример показан на рис. 3. Значения uD0 получается из диаграммы в масштабированном виде (uDmax/uDtyp). Эти значения могут быть получены из таблицы данных, для инженерных расчётов допускается погрешность (10 % – 20 %).
Мгновенное значение потерь диода:
![]() .
.
При среднем токе диода IFav и среднеквадратичном токе диода IFrms. Потери диода на электропроводность в момент переключения (Tsw=1/fsw) определяются по уравнению:
![]()
![]() .
.
Процесс определения RDSon, показанный на рис. 3, основан на применении типичных значений RDSon. Но эта процедура должна быть подтверждена и для реальных случаев применения. Значение RDSon может быть рассчитано с учётом температуры и производительности. Это может быть сделано с применением следующего уравнения:
![]() .
.
где TJ – температура p-n перехода и RDSonMAX (25°C) – максимальное значение RDSon при 25°С, которое может быть определено из табличных данных. Температурный коэффициент α может быть рассчитан следующим образом. Два значения величины (TJ1, RDSon1) и (TJ2, RDSon2) могут быть получены на основе данных из рис. 4. Эти значения могут быть применены в последнем уравнении для определения α.
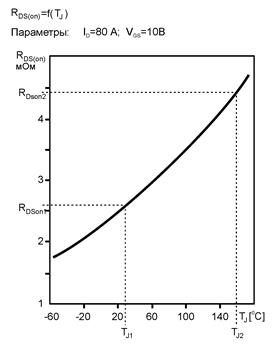
Рис. 4. Представление TJ/RDSon в каталоге
В автомобиле вся нагрузка имеет индуктивную составляющую, для примера рассмотрим расчёта потерь, в ключе предназначенного для коммутации электродвигателя постоянного тока, при расчёте следует учитывать все токи, присутствующие в схеме.
На рис. 5 и рис. 6 показаны топология и типичные сигналы одно квадрантного прерывателя для электропривода постоянного тока.

Рис. 5. Одноквадрантный привод постоянного тока
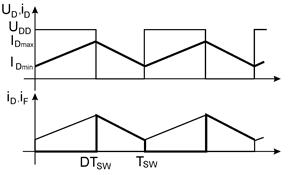
Рис. 6. Типовые сигналы в одноквадрантном двигателе постоянного тока
Входные параметры для расчёта: входное напряжение (UDD), выходное напряжение (U0), индуктивность арматуры (якоря) (L), сопротивление арматуры (якоря) (R), противо-ЭДС (E), выходная мощность (P0), частота переключения (fsw).
Среднее значение выходного тока:
![]() .
.
Производительность при непрерывной проводимости:
![]() .
.
Минимальный выходной ток:
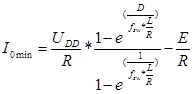 .
.
Максимальный выходной ток:
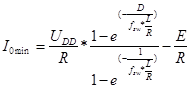 .
.
Пульсации выходного тока:
![]() .
.
Параметры необходимые для расчёта потерь могут быть определены из следующих соотношений:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
На рис. 7 и 8 показаны топология и типичные сигналы в четырёх квадрантном прерывателе для электропривода постоянного тока. На рис. 8 показан случай широтно-импульсного модулятора (ШИМ). Соответствующие значения могут быть определены с помощью той же самой процедуры, что и для одноквадрантного прерывателя, принимая во внимание, что для широтно-импульсного модулятора нагрузка рассматривается при напряжении 2UDD.
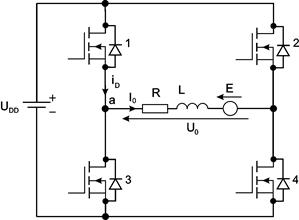
Рис. 7. Четырёх квадрантный двигатель постоянно тока
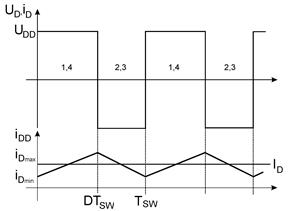
Рис. 8. Типичные сигналы для четырёх квадрантного двигателя с биполярным ШИМ
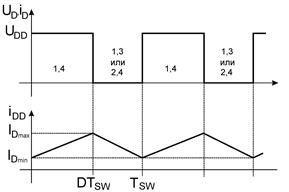
Рис. 9. Типичные сигналы для четырёх квадрантного двигателя с униполярным ШИМ
Заключение
Представленная методика расчёта статических потерь достаточно точно описывает физические процессы, протекающие в ключе. Динамическими потерями, в случае применения ключей в автомобиле, можно пренебречь из-за небольшого количества переключений. Методика может быть полезна при решении задачи замены традиционных коммутирующих элементов на полупроводниковые.
Рецензенты:
Ютт В.Е., д.т.н., профессор, зав. кафедрой «Электротехника и электрооборудование», ФГБОУ ВПО «Московский автомобильно-дорожный государственный технический университет (МАДИ)», г. Москва.
Марсов В.И., д.т.н., профессор, профессор кафедры «Автоматизация производственных процессов», ФГБОУ ВПО ФГБОУ ВПО «Московский автомобильно-дорожный государственный технический университет (МАДИ)», г. Москва.
Библиографическая ссылка
Феофанова Л.С., Мороз С.М., Лазарев Д.Б. МЕТОДИКА РАСЧЁТА СТАТИЧЕСКИХ ПОТЕРЬ В МОП-ТРАНЗИСТОРЕ ИНТЕЛЛЕКТУАЛЬНОГО КЛЮЧА // Современные проблемы науки и образования. 2014. № 1. ;URL: https://science-education.ru/ru/article/view?id=12002 (дата обращения: 02.07.2026).