



В настоящее время отечественный рынок силового оборудования, предназначенного для комплектации энергетических установок электромобилей или автомобилей с комбинированными энергетическими установками (КЭУ), только начинает формироваться. Обусловлено это, главным образом, тем, что внимание к перспективным транспортным средствам со стороны как автовладельцев, так и правительства, с каждым годом усиливается всё больше. На федеральном уровне начинают внедряться программы развития перспективных автотранспортных средств, участие в которых ведущих автоконцернов является неотъемлемой частью их реализации.
В связи с этим готовые технические решения, проработанные не только в теоретической части, но и реализованные в макетных образцах или готовой продукции, являются востребованными в условиях развивающегося сегмента транспортной отрасли – автотранспортных средств (АТС) с электромеханическими трансмиссиями.
В рамках научно-исследовательской работы (НИР), проводимой на кафедре «Электротехника и электрооборудование» МАДИ, изготовлен и испытан унифицированный электромеханический узел трансмиссии транспортного средства с индивидуальным приводом ведущих колес. В статье представлены результаты стендовых испытаний данной системы, включающей экспериментальные образцы колесной пары (КП) и блока управления движителями (БУД), и ориентированной на использование в электромобилях, а также автомобилях с комбинированными энергетическими установками (КЭУ) для городских грузопассажирских перевозок.
Под колесной парой здесь понимается компонент ходовой части транспортного средства, включающий: ведущие колеса (ВК), движитель колесной пары (ДКП), устройства механической связи ВК и ДКП. В свою очередь, ДКП – узел колесной пары, в состав которого входят электродвигатель-генератор (ЭДГ) и элементы механической трансмиссии. В данной системе одну из ключевых ролей играет БУД – комплекс устройств, осуществляющих преобразование электрической энергии первичного источника и автоматическую реализацию оптимизированного управления ЭДГ в двигательном и генераторном режимах по заданию системного контроллера транспортного средства.
Основной задачей испытаний является практическая (экспериментальная) оценка функциональных и параметрических характеристик электрооборудования электропривода колесной пары. Методика испытаний экспериментальных образцов КП и БУД состоит в опытной оценке основных характеристик и зависимостей как отдельных компонентов колесной пары, так и результирующих показателей изготовленных образцов посредством прямого и косвенного измерения их электрических, тягово-энергетических и механических параметров.
Испытания экспериментальных образцов колесной пары и блока управления движителями в составе колесной пары осуществлялись с использованием специально оборудованного стенда, включающего: нагрузочные агрегаты, устройства управления, измерительную и регистрирующую аппаратуру. Следует отметить, что источником энергии при проведении стендовых испытаний являлась трехфазная сеть с последующим выпрямлением переменного напряжения в постоянное для питания БУД. Имитация нагрузки тяговых электродвигателей-генераторов колесной пары реализована при помощи управляемых нагрузочных машин постоянного тока. Состав и функциональная электрическая схема стенда для проведения экспериментальных исследований отражены на рис. 1.
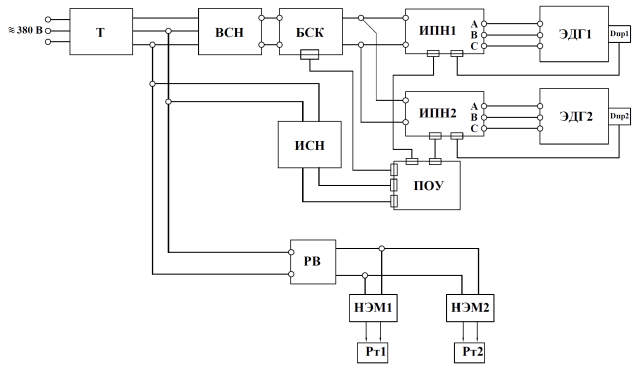
Рис. 1. Функциональная электрическая схема стенда испытаний экспериментальных образцов колесной пары и блока управления движителями:
Т – управляемый трансформатор; ВСН – выпрямитель силового напряжения; БСК – блок силовой коммутации; ИСН – источник служебного назначения; ИПН – инвертор постоянного напряжения; ПОУ – пульт оперативного управления; ЭДГ – электродвигатель-генератор; РВ – регулятор возбуждения НЭМ; НЭМ – нагрузочная электромашина; РТ – регулятор тока НЭМ; DПР – датчик положения ротора.
В ходе испытаний экспериментальных образцов получены следующие результаты.
- Зависимости сигнала управления (задания) пульта оперативного управления (ПОУ) от внешних воздействий.
- Зависимости выходных сигналов датчиков обратных связей (ДОС) по напряжению (DU), току (DI) и частоте вращения (Df) от внешних воздействий.
- Характеристики выполнения оперативных функций блоком силовой коммутации (БСК).
- Результаты регистрации и оценки выходного напряжения U ф и тока Iф фаз ИПН.
- Определены характеристики движителей колесной пары, в том числе:
- зависимости крутящего момента ЭДГ от частоты f2 при постоянных (заданных) величинах Iф в пределах Iфном. ≤ Iф ≤ 3I фном. (рис. 2) с целью выявления зависимости частоты f2 от величины Iф при максимальных величинах МД = Мmax, определяющие оптимальную зависимость между МД и Iф (рис. 3).
- выявлены механические характеристики ЭДГ и колесной пары (рис. 4 и 5). При этом была определена область регулирования механической характеристики ЭДГ МД(n) и колесной пары при оптимальной зависимости МД (Iф) в пределах частоты вращения ротора ЭДГ 0 ≤ n ≤ 1430 мин-1 и максимальных моментов ЭДГ (МДмакс=196 Н∙м; МКПмакс=1900 Н∙м);
- подтверждена возможность реализации плавного регулирования крутящего момента в диапазоне изменения частоты вращения ротора ЭДГ 0 ≤ nд ≤ 2900 мин-1 и ведущих
колес 0 ≤ nвк ≤ 580 мин-1.
- Результаты регистрации и оценки качества переходных процессов в системе ИПН-ЭДГ при реализации заданий по режиму работы ЭП согласно типовому графику движения ТС, в том числе:
- устойчивое (без перерегулирования) достижение заданной величины Iф по сигналу ПОУ;
- поддержание заданного Iф в режиме разгона;
- переход на заданный Iф в режиме, соответствующем равномерному движению ЭДГ;
- переход ЭДГ на генераторное (рекуперативное) торможение;
- снижение Iф до Iф = 0 при остановке ТС;
- реверс вращения вала ЭДГ при реализации движения ТС в обратном направлении.
Основные результаты испытаний представлены на рис. 2-5.
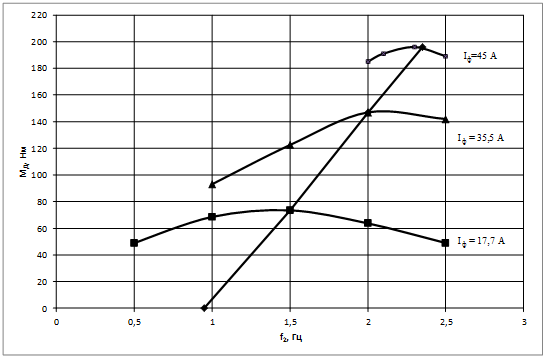
Рис. 2. Зависимости крутящего момента ЭДГ от частоты f2 при постоянных величинах Iф
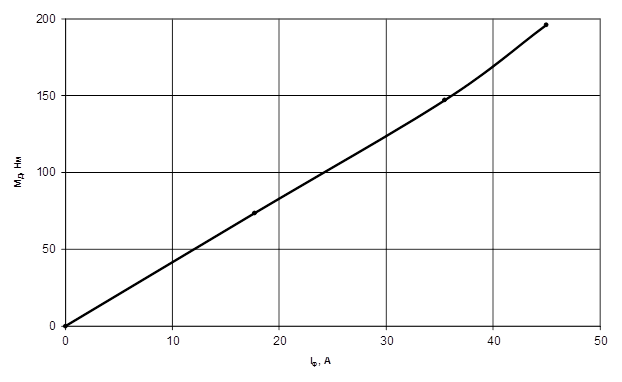
Рис. 3. Оптимальная зависимость крутящего момента ЭДГ движителя колесной пары от тока фазы
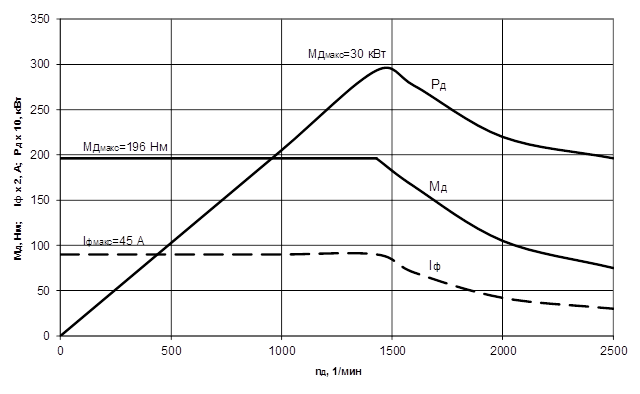
Рис. 4. Зависимости момента, мощности на валу и тока фазы ЭДГ движителя КП от частоты вращения ротора
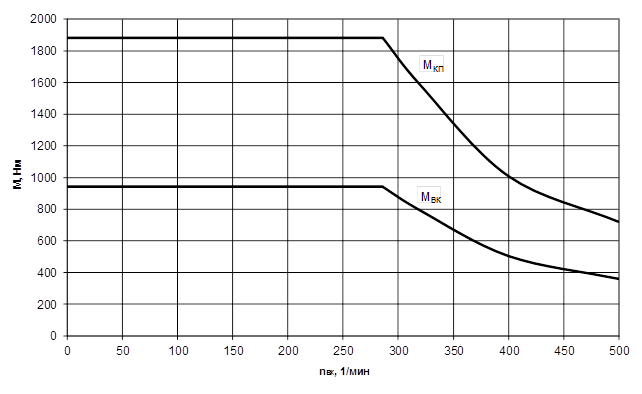
Рис. 5. Зависимость момента на ведущем колесе МВК и суммарного момента МКП колесной пары от частоты вращения ведущих колес
Полученные характеристики экспериментальных образцов, в том числе достигнутые значения эквивалентной максимальной мощности колесной пары и блока управления движителями - 60 кВт и максимального развиваемого момента колесной пары - 1900 Н∙м, обеспечивают возможность применения последних в составе переднего или заднего моста транспортных средств (электромобилей или автомобилей с комбинированными энергетическими установками) с полной массой до 3,5 т. К АТС из указанного типоразмерного ряда относятся получившие широкое распространение в качестве маршрутных транспортных средств, а также автомобилей для коммерческих грузоперевозок АТС типа ГАЗ-322132 «Газель», LDV Maxus, Fiat Ducato, Ford Transit Bus, Mercedes-Benz Sprinter.
Полученные в ходе НИР результаты теоретических и экспериментальных исследований могут быть использованы при выполнении работ, связанных с разработкой и созданием перспективных транспортных средств - электромобилей и автомобилей с КЭУ.
Рецензенты:
Марсов В.И., д.т.н., профессор, МАДИ, г. Москва.
Илюхин А.В., д.т.н., профессор, МАДИ, г. Москва.
Библиографическая ссылка
Сидоров К.М., Ютт В.Е., Лазарев Д.Б. РЕЗУЛЬТАТЫ СТЕНДОВЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННОГО ЭЛЕКТРОМЕХАНИЧЕСКОГО УЗЛА ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА С ИНДИВИДУАЛЬНЫМ ПРИВОДОМ ВЕДУЩИХ КОЛЕС // Современные проблемы науки и образования. 2014. № 1. ;URL: https://science-education.ru/ru/article/view?id=11868 (дата обращения: 27.06.2026).