



Введение
Роботы на сегодняшний день являются неотъемлемым атрибутом жизнедеятельности человеческого общества. Несмотря на многообразие роботов, их применение именно в промышленности определило бурный рост и развитие этого технического направления, поэтому парк промышленных роботов является наиболее массовым и востребованным на сегодняшний день.
Основные функциональные и эксплуатационные возможности промышленных роботов определяются конструкцией манипулятора: рабочая зона, манипулятивность, коэффициент сервиса, нагрузочная способность и т.д. Классификацию манипуляторов возможно провести по любому из вышеперечисленных параметров, но в данной работе рассматривается такой признак как жесткость звена манипулятора – базового элемента конструкции. Среди всего многообразия манипуляторов, известных на текущий момент, можно выделить три больших класса:
- с жёсткими звеньями;
- с использованием звеньев с контролируемой деформацией;
- с использованием звеньев с управляемым изгибом.
Если первые два типа манипуляторов достаточно хорошо известны, то появившийся практически одновременно с ними класс манипуляторов с управляемым изгибом в силу объективных на то время причин не нашел широкого применения. Но в настоящий момент проявляется острая потребность именно в таких манипуляционных механизмах как средстве контроля, диагностики и доставки инструмента в труднодоступные полости сложных механизмов. Интерес проявляется также со стороны теории катастроф как к средству доступа в разрушенные сооружения, медицины – малотравматичное средство доставки, специальной робототехники – обследование подозрительных полостей и работа в загроможденном пространстве.
Классификация манипуляторов по признаку жёсткости звеньев
К классу манипуляторов с жёсткими звеньями относятся практически все традиционные промышленные манипуляторы, разработка которых определялась выполняемыми ими технологическими задачами. Такие манипуляторы представляют собой механизмы, состоящие из жёстких звеньев, соединённых посредством кинематических пар с угловым или поступательным относительным перемещением [7]. Звенья при этом образуют либо последовательные разомкнутые кинематические цепи, либо параллельные цепи. В первом случае обеспечивается перемещение точки схвата при движении хотя бы одного из звеньев, во втором случае перемещение рабочей точки происходит при одновременном движении кинематически связанных звеньев. Примерами манипуляторов первого типа является большинство промышленных манипуляторов, работающих в составе технологических линий машиностроительных предприятий: PUMA (США), Unimate (США), Versatran (Англия) и другие. Различаются они комбинацией вращательных и поступательных пар. Классификация таких сочетаний и их влияние на рабочую зону манипулятора хорошо освещены в отечественной и зарубежной литературе [4, 7]. Примерами манипуляторов с кинематически связанными звеньями являются платформа Стюарта, трипод фирмы Festo, «робот-паук» фирмы Kawasaki и др. Как первый, так и второй типы манипуляторов с жесткими звеньями строят с избыточными степенями подвижности, чтобы обеспечить высокую эффективность при манипуляциях в ограниченных и сложноорганизованных рабочих пространствах. Но при этом уменьшается коэффициент Ли–Янга, появляются «особые» зоны в оперативном пространстве и сохраняется опасность заклинивания в узких местах.
Манипуляторы на основе звеньев с контролируемой деформацией как отдельный класс получили известность относительно недавно [10–12]. Ранее такие конструкции часто назывались манипуляторами с упругими звеньями (связями), когда в процессе перемещения учитывался возможный (расчетный) изгиб звеньев и их вынужденные колебания. Необходимость в подобных технических решениях вызвана требованиями существенного облегчения звеньев, достижения более высоких отношений полезной нагрузки к массе манипулятора. Учёт и контроль возникающих деформаций осуществляется более сложной, по сравнению с манипуляторами на базе жёстких звеньев, системой управления.
Целью проводимых исследований являются манипуляторы третьего типа: с управляемым изгибом. Изгиб звена может быть реализован на основе различных физических принципов и с применением различных материалов, но общим свойством является то, что за счет управляемого изменения пространственной конфигурации отдельных звеньев осуществляется перемещение схвата или рабочего инструмента в пространстве. Существенным отличием также является то, что в отличие от манипуляторов первых двух классов для обеспечения эквивалентного количества степеней свободы таким конструкциям требуется меньшее количество звеньев. К недостаткам подобных технических решений часто относят их малую жесткость, что делает невозможным работу с формообразующим инструментом, значительно снижает вес полезной нагрузки и усложняет управление. Но если рассматривать гибкие манипуляторы как средство доставки различных инструментов обработки (например, покраски) и бесконтактного контроля в труднодоступные внутренние полости агрегатов со сложной пространственной формой каналов, то они идеально подходят для решения подобных задач. Другой особенностью манипуляторов данного типа является способность обхватывать объект. Это свойство используется, например, в устройстве по подъёму затонувших объектов [5].
Манипуляторы на базе звеньев с управляемым изгибом
На сегодняшний день известны несколько конструкционных подходов в создании звеньев с управляемым изгибом.
Наиболее распространены манипуляторы, в которых изгиб звеньев осуществляется путем изменения давления воздуха в полостях деформируемых элементов, которые разделены на два и более независимых сегмента. Самая известная конструкция манипулятора, реализующего принцип управления изгибом таким образом, создана инженерами фирмы Festo и позиционируется ими как бионический манипулятор, повторяющий функции хобота слона (рис. 1) [8]. Манипулятор состоит из ультралегких сегментов пластичного материала. Каждый сегмент имеет камеру, наличие которой превращает данный сегмент в независимый пневматический мускул. Соединение таких сегментов разного размера в определенной геометрической последовательности позволило получить манипулятор, обладающий высокой подвижностью, большими значениями коэффициента сервиса. При подаче сжатого воздуха в разные камеры манипулятора получается соответствующее перемещение в трехмерном пространстве.

Рис. 1. Бионический манипулятор фирмы Festo
Встречаются описания гибких манипуляторов с пневматическим и гидравлическим приводами, которые строятся на базе трубок Бурдона. Так в патенте [1] подобный принцип используется для управления формой манометрической трубки 1, собранной из металлической полосы 3 и полусильфона 4 и покрытой материалом 5 с вязкоупругими свойствами для гашения вибраций (рис. 2).
.
Рис. 2. Манипулятор на базе манометрической трубки
Через впускное отверстие трубки 2 подаётся воздух, изменяя давление во внутренней полости трубки, что, в свою очередь, распрямляет её, при уменьшении давления в полости трубки, она возвращается в исходную форму. Подобные манипуляторы применяются, в основном, для работы в экологически чистых средах и вакууме, где недопустимо наличие трущихся частей механизмов
Другой принцип построения звена с управляемым изгибом предполагает использование сплавов (кристаллов), обладающих эффектом памяти, и биметаллических пластин [7]. При такой реализации отсутствуют передаточные механизмы, т.к. само звено выступает в роли активного элемента и величина перемещения определяется температурой его нагрева, а скорость перемещения – интенсивностью теплообменных процессов в среде. Невысокое быстродействие, обусловленное низкой скоростью возврата в исходное положение при естественном охлаждении, существенно ограничивает сферу применения подобных устройств.
В патенте [6] описан манипулятор, использующий магнитные материалы. Манипулятор представляет собой герметичную гибкую трубку, заполненную магнитной жидкостью. Четыре соленоида, расположенные через 90 градусов друг относительно друга вдоль внешних стенок трубки, при подаче по определённому алгоритму на них напряжения управляют её изгибом.
Ещё один принцип построения манипуляторов с управляемым изгибом основан на применении твердотельных элементов со сферической поверхностью. Подобный гибкий двухзвенный манипулятор был разработан фирмой Spine Inc. в начале 80-х годов прошлого века (рис. 3). Около 25 образцов таких манипуляторов эксплуатировались на предприятиях Volvo, Volkswagen и JCB на лакокрасочных производствах. Манипулятор имел 7 степеней подвижности: две в плече, две в предплечье и три кистевые [9].
Подробнее конструкция манипулятора приводится в [4], где элементы звена (чечевицеобразные диски) имеют сферические поверхности, которые и определяют форму её изгиба (рис. 3). Малая площадь контакта между элементами звена, высокая вероятность проскальзывания при изменении положения в пространстве требуют использования специальных мер: применение более твердых материалов или упрочнение поверхностного слоя, модификация контактных поверхностей в качестве меры по исключению соскальзывания элементов друг относительно друга. Поэтому время от времени предпринимались попытки изменить конструкцию манипуляторов: так в [3] предлагается нанести на поверхность элементов антипроскальзывающие насечки в поперечном движению элемента направлении в виде мелких зубьев, ввести ограничительные и крепёжные пазы от выпадения элементов друг из друга.

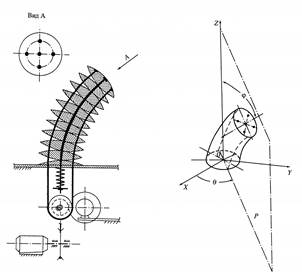
Рис. 3. Внешний вид и конструкция манипулятора Spine
При этом движение манипулятора будет происходить только в двух взаимно перпендикулярных плоскостях, что ограничивает его применение.
Практически во всех публикациях, где встречается описание манипулятора, построенного на базе дисков со сферической поверхностью, рассматриваются в основном конструктивные аспекты и не уделяется внимание вопросам управления. На рис. 3 видно, что тросовая система состоит из пяти тросов, где 4 силовых троса, проходящие через отверстия ближе к краю диска, образуют 2 пары, для движения каждой из которых используется один привод, а через центральное отверстие дисков проходит ещё один трос, обеспечивающий натяжение всей системы и центрирование дисков. Надо отметить, что такое конструктивное решение вызывает некоторое сомнение в его целесообразности. При движении дисков со сферической поверхностью друг относительно друга, изменение длин противофазных тросов происходит неодинаково. Поэтому управление перемещением двух попарно работающих тросов при наличии лишь одной пружины натяжения и двух приводов весьма затруднительно и требует: либо установки отдельных пружин на каждую пару тросов, либо перемещения каждого троса с помощью отдельного привода. Развязка тросов с помощью пружин также сомнительна, так как диапазон изменения такой пружины должен быть весьма значительным и зависит от количества дисков, составляющих звено.
Таким образом, можно отметить следующее: конфигурации и принципы построения манипуляторов на базе жёстких звеньев детально и полно описаны в отечественной и зарубежной литературе и успешно решают множество задач в различных отраслях машиностроения. Манипуляторы на базе звеньев с управляемым изгибом могут использоваться там, где применение традиционных промышленных манипуляторов затруднено, а зачастую и вовсе невозможно. Это направление в развитии робототехники достаточно актуально и требует разработки новых конструкторских решений, применения новых материалов, последних достижений микроэлектроники и вычислительной техники, модификации математического аппарата для описания кинематики, статики и динамики манипулятора, использования новых или модификации существующих принципов и методов интеллектуального управления.
В настоящее время ведутся исследования по разработке конструкции многоэлементного звена с управляемым изгибом построенного на базе твердотельных элементов (рис. 4) [2]. Техническое решение представляет собой модификацию робота Spine: требуемое положение в пространстве каждого звена достигается благодаря изменению длин 4 тросов, свободно скользящих в отверстиях сегментов, при этом каждый трос имеет собственный привод. Звено манипулятора реализует 2 степени подвижности, рабочая поверхность представляет собой выпуклую поверхность, размер которой зависит от количества сегментов в составе звена.

Рис. 4. Экспериментальный вариант гибкого манипулятора (слева) и виды сегмента (справа)
Чтобы реализовать все возможности предлагаемой конструкции, имеющей достаточно интересный набор свойств, необходимо решить целый ряд задач, таких как:
- синтез и анализ кинематической модели манипулятора с учётом особенностей кинематических пар, образуемых парами сегментов;
- синтез и анализ динамических, полной и явной, моделей манипулятора;
- разработка многоканальной системы сбора и обработки данных в реальном масштабе времени для информационного обеспечения задач управления манипулятором и экспериментального исследования динамических свойств манипулятора;
- разработка инженерных методик для выбора оптимальных параметров конструкции манипулятора с учётом решаемых задач;
- синтез системы управления манипулятором.
Авторы выражают благодарность Программе фундаментальных исследований № 1 ОЭММиПУ РАН «Научные основы робототехники и мехатроники» за финансовую поддержку проводимых исследований.
Рецензенты:
Мунасыпов Р.А., д.т.н., профессор, профессор кафедры «Техническая кибернетика», ФГБОУ ВПО Уфимский государственный авиационный технический университет, г. Уфа.
Жернаков С.В., д.т.н., профессор, заведующий кафедрой «Электроника и биомедицинские технологии», ФГБОУ ВПО Уфимский государственный авиационный технический университет, г. Уфа.
Библиографическая ссылка
Богданов Д.Р., Даринцев О.В. КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ МАНИПУЛЯТОРОВ С УПРАВЛЯЕМЫМ ИЗГИБОМ // Современные проблемы науки и образования. 2013. № 6. ;URL: https://science-education.ru/ru/article/view?id=11784 (дата обращения: 17.07.2026).