



Испытания современных систем ориентации и стабилизации (СОС) современных КА представляют собой сложную задачу [5]. Такие системы имеют в своём составе высокоточные приборы определения углового положения по различным ориентирам – Солнцу, Земле, звёздам; приборы, измеряющие угловые скорости КА, исполнительные органы – маховики, гиросиловые приборы, реактивные двигатели. Для управления аппаратурой и расчёта компенсирующих воздействий применяют бортовые цифровые вычислительные машины. Состав СОС и предъявляемые к ним требования возлагают на наземные испытания большие задачи.
Наиболее эффективным способом испытаний систем ориентации и стабилизации являются испытания с применением принципов полунатурного моделирования [1], при этом имитация движения КА осуществляется путем установки датчиков СОС на динамические поворотные стенды. На стендах датчики движутся по отношению к имитаторам ориентиров аналогично их угловому движению на борту спутника, относительно Солнца и Земли, звезд. Датчики, установленные на поворотных стендах [2], измеряют параметры углового движения и выдают информацию об угловом положении относительно имитаторов Земли и Солнца. По показаниям датчиков СОС формирует необходимые управляющие сигналы на исполнительные органы, с помощью которых создаются управляющие моменты на спутник.
Однако по ряду причин не всегда при проведении наземных испытаний СОС удается использовать реальные приборы и устройства. Например, двигательная установка СОС (двигатели ориентации), для работы которой необходимо иметь топливные емкости и определенную камеру, а также дорогостоящее оборудование, которое с требуемой точностью может измерять тягу каждого двигателя ДУ. Как правило, проведение наземных испытаний СОС с использованием реальной ДУ является нецелесообразным и приводит к неоправданным большим материальным затратам.
Для решения этих проблем в ОАО «ИСС» разработан и изготовлен имитатор двигательной установки (ИДУ) (рис. 1).

Рисунок 1. Имитатор двигательной установки
Структурная схема ИДУ приведена на рисунке 2.
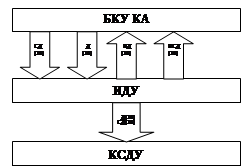
Рисунок 2. Структурная схема имитатора двигательной установки:
БКУ КА – бортовой комплекс управления КА;
КСДУ – комплекс сбора данных и управления;
Д(16) – команды управления на включение/выключение ДУ;
СД(16) – команды управления на включение клапанов ДУ;
ВД(16), ВСД(16) – сигналы готовности, формируемые ИДУ.
ИДУ принимает от бортового комплекса управления КА (далее по тексту - БКУ КА) команды управления Д (16) на включение/выключение ДУ, в количестве 16 штук (8 включение, 8 выключение). Команды реализованы следующим образом:
- включение/выключение ДУ осуществляется подачей напряжения амплитудой 27 В (допуск +7В/-4В) длительностью 0,1-0,6 с при токе нагрузки не более 0,8 А.
Кроме того, ИДУ принимает от БКУ КА по резервным линиям команды на включение клапанов двигателей СД (16) в количестве 16 штук. Команды на включение клапанов двигателей реализованы следующим образом:
- открытие клапанов двигателя моделируется подачей напряжения амплитудой 27 В (допуск: +0,8В/-3В), длительностью 0,05-0,6 с;
- включенное состояния клапанов ИДУ поддерживается подачей напряжения не менее 7 В (рис. 3).
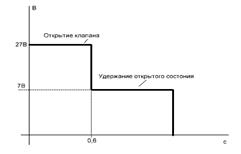
Рисунок 3. Команда на включение клапанов двигателя
В ответ на полученные команды управления ИДУ формирует сигнал готовности ВД (16) или ВСД (16). Сигнал готовности формируется релейным ключом. Опрос БКУ КА релейного ключа осуществляется импульсами с частотой 160 Гц. Сигнал ВД (16) выдается дублированной линией, сигнал ВСД (16) выдается по двум дублированным линиям. При этом ИДУ выдает в комплекс расчета параметров движения и управления имитационным оборудованием (КСДУ) квитанцию о срабатывании Д (16) либо СД (16). Квитанция выдается релейным ключом. КСДУ опрашивает ключи ИДУ напряжением 5 В. При этом сопротивление ключа ИДУ в замкнутом состоянии не более 5 Ом, в разомкнутом состоянии не менее 200 кОм.
Таким образом, ИДУ выполнен в виде релейных ключей, которые замыкаются при поступлении команд на включение клапанов двигателя, тем самым имитируя лишь включение клапанов ДУ. При этом величина тяги, которую должен формировать двигатель при включении клапанов ДУ задается программно в виде констант. Данный способ имитации работы ДУ является грубым, так как тяга в данном случае задается в виде постоянной величины, при этом не учитываются законы нарастания тяги при открытии клапанов ДУ и спада тяги при закрытии клапанов.
ИДУ при наземных испытаниях СОС КА работает в замкнутом контуре управления. Значения тяги и закон ее изменения влияют на скорость движения динамических стендов, а следовательно, и на показания приборов СОС. Таким образом, данный метод имитации работы ДУ приводит к погрешностям в работе всего замкнутого контура полунатурного моделирования.
Для устранения вышеперечисленных недостатков ИДУ авторами работы предложено модернизировать имитатор двигательной установки, в результате чего будут обеспечены:
- имитация работы двигательных установок КА, с учетом реализации законов нарастания и спада тяги при включении и выключении ДУ;
- прием от бортового комплекса управления сигналов управления;
- имитация включения двигательной установки с требуемой периодичностью;
- формирование выходных параметров в БКУ КА: телеметрических параметров, сигналов.
Ее отличием является включение в контур управления компьютера, который будет формировать по программе нужные законы изменения тяги двигателя при включении и выключении ДУ . Структурная схема модернизированного имитатора представлена на рисунке 4.
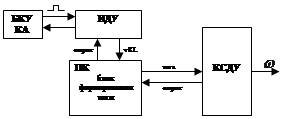
Рисунок 4. Структурная схема модернизированного ИДУ:
vKL – сигналы включения клапанов двигательной установки (ДУ);
ПК – персональный компьютер;
![]() – угловая скорость движения динамических стендов.
– угловая скорость движения динамических стендов.
При наземных испытаниях СОС, в составе комплекса полунатурного моделирования, БКУ КА выдает в ИДУ сигналы управления на включение/отключение клапанов ДУ. График изменения сигнала управления представлен на рисунке 5.
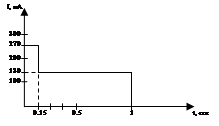
Рисунок 5. График изменения сигнала управления
Из графика видно, что открытие клапана ДУ происходит с выдачей продолжительного сигнала с амплитудой 130 мА, и сигнала 270 мА длительностью 150 мс.
При этом выбор включаемого/выключаемого клапана ДУ зависит от номеров контактов интерфейсного модуля сопряжения БКУ КА, с которых выдается сигнал управления.
Данный сигнал поступает в ИДУ. ИДУ выполнен из релейных ключей, каждый соответствует одному из восьми клапанов ДУ. При поступлении сигнала управления происходит замыкание соответствующего ключа, что означает открытие выбранного клапана ДУ.
Блок формирования тяги (БФТ) реализован в отдельном ПК и предназначен для формирования тяги ДУ по заданному закону. БФТ опрашивает ИДУ напряжением 5 В, при этом открытие какого-либо клапана ДУ соответствует сопротивлению 5 Ом, закрытое состояние клапанов соответствует сопротивлению не менее 200 кОм. В таблице 1 представлены экспериментальные данные изменения тяги ![]() , полученные в результате огневых испытаний двигательной установки космического аппарата в момент ее включения.
, полученные в результате огневых испытаний двигательной установки космического аппарата в момент ее включения.
|
|
6
|
6.3
|
6.7
|
7.1
|
7.6
|
8
|
8.5
|
8.6
|
8.5
|
8
|
8
|
8
|
8
|
|
Время (сек) |
0
|
2
|
6
|
10
|
14
|
19
|
25
|
31
|
38
|
46
|
60
|
70
|
80
|
* - грамм-сила. Килограмм-сила (кгс) равна силе, сообщающей телу массой один килограмм ускорение ![]() . Единица силы системы единиц МКГСС [3].
. Единица силы системы единиц МКГСС [3].
Время начала формирования тяги ![]() соответствует включению клапана/ов ДУ
соответствует включению клапана/ов ДУ ![]() . Через 46 секунд от начала формирования тяги
. Через 46 секунд от начала формирования тяги ![]() гс и не изменяется до момента выключения клапанов ДУ.
гс и не изменяется до момента выключения клапанов ДУ.
В таблице 2 представлены экспериментальные данные изменения тяги ![]() , полученные в результате огневых испытаний двигательной установки космического аппарата в момент ее отключения. Таблица 2
, полученные в результате огневых испытаний двигательной установки космического аппарата в момент ее отключения. Таблица 2
|
|
8
|
7.9
|
6.5
|
5.5
|
4.4
|
3.1
|
2.1
|
1
|
0
|
|
Время (сек) |
0 |
0.5 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
Время начала спада тяги ![]() соответствует отключению клапана/ов ДУ
соответствует отключению клапана/ов ДУ ![]() . Через 8 секунд от начала спада тяги значение тяги станет:
. Через 8 секунд от начала спада тяги значение тяги станет:![]() гс.
гс.
Для реализации БФТ используется ПК с установленной на него программой расчета тяги (ПРТ).
ПРТ предназначена для расчета значения тяги в моменты включения и отключения имитатора ДУ. Алгоритм работы ПРТ приведен на рисунке 8.
В зависимости от полученных исходных данных для КА на значения тяги ДУ, ПРТ определяет значение тяги в текущий момент времени, учитывая при этом законы нарастания и спада тяги.
Законы спада и нарастания тяги ДУ, определенные экспериментально, выразим в виде аналитических выражений [4].
Выражение (1) описывает закон нарастания тяги:
![]() (1)
(1)
Коэффициенты для уравнения 1 имеют значения:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]()
В результате определено уравнение, описывающее закон нарастания тяги в момент открытия клапанов ДУ.
![]() (2)
(2)
На рисунке 6 построены графики изменения тяги при открытии клапанов ДУ с использованием уравнения 2 и таблицы 1.
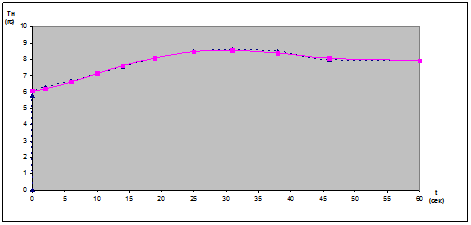
Рисунок 6. Графики изменения тяги при открытии клапанов ДУ:
--- график, построенный по экспериментальным данным;
__ график, построенный с помощью уравнения 2
Сравнив график, построенный с использованием уравнения 2, с графиком, построенным по экспериментальным данным, видно, что графики почти совпадают, относительная ошибка ![]() не превышает 1%.
не превышает 1%.
Выражение 3 описывает закон спада тяги:
![]() (3)
(3)
Коэффициенты для уравнения 3 имеют значения:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]()
В результате определено уравнение, описывающее закон нарастания тяги в момент закрытия клапанов ДУ.
![]() (4)
(4)
На рисунке 7 построены графики изменения тяги при открытии клапанов ДУ с использованием уравнения 4 и таблицы 2.
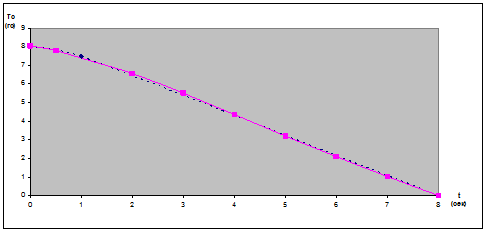
Рисунок 7. Графики изменения тяги при закрытии клапанов ДУ:
--- график, построенный по экспериментальным данным;
__ график, построенный с помощью уравнения 4
Сравнив график, построенный с использованием уравнения 4, с графиком, построенным по экспериментальным данным, видно, что графики почти совпадают, относительная ошибка ![]() не превышает 1%.
не превышает 1%.
Используем полученные уравнения 2 и 4 при разработке алгоритма работы ПРТ.
Рассмотрим алгоритм функционирования системы. Блок-схема работы алгоритма ПРТ представлена на рисунке 8. В начале алгоритма анализируется состояния клапанов ДУ (блок 1). При открытии клапанов ДУ анализируется состояние клапанов на предыдущем шаге, если клапана ДУ были включены либо время их выключения превысило 8 секунд, то включается таймер-счетчик ![]() , вычисление значений тяги осуществляется согласно закону нарастания тяги
, вычисление значений тяги осуществляется согласно закону нарастания тяги ![]() (блоки 1-7). Если
(блоки 1-7). Если ![]() превышает 60 секунд, значение тяги формируется в виде константы
превышает 60 секунд, значение тяги формируется в виде константы ![]() гс (блоки 9-10). Вычисление тяги согласно
гс (блоки 9-10). Вычисление тяги согласно ![]() происходит до момента закрытия клапанов ДУ (блок 8). При закрытии клапанов ДУ анализируется состояние клапанов на предыдущем шаге (блок 11). Если на предыдущем шаге клапаны были закрыты, то происходит выход из алгоритма. Если клапаны были открыты и время работы счетчика
происходит до момента закрытия клапанов ДУ (блок 8). При закрытии клапанов ДУ анализируется состояние клапанов на предыдущем шаге (блок 11). Если на предыдущем шаге клапаны были закрыты, то происходит выход из алгоритма. Если клапаны были открыты и время работы счетчика ![]() превысило 60 секунд, то включается счетчик
превысило 60 секунд, то включается счетчик ![]() , значения тяги вычисляется согласно закону спада тяги
, значения тяги вычисляется согласно закону спада тяги ![]() (блоки 13-17), при
(блоки 13-17), при ![]() секунд значение тяги формируется виде константы
секунд значение тяги формируется виде константы ![]() гс (блок 19). Если клапаны ДУ были открыты меньше 60 секунд, то определяются значения
гс (блок 19). Если клапаны ДУ были открыты меньше 60 секунд, то определяются значения ![]() в момент окончания нарастания тяги
в момент окончания нарастания тяги ![]() , значения тяги формируются согласно закону спада тяги со значения
, значения тяги формируются согласно закону спада тяги со значения ![]() (блоки 21-22).
(блоки 21-22).
При открытии клапанов ДУ, сразу после их закрытия, анализируется время, на которое клапаны были закрыты ![]() . Если время
. Если время ![]() превысило 8 секунд, то тяга формируется согласно закону нарастания, если нет, определяется значение
превысило 8 секунд, то тяга формируется согласно закону нарастания, если нет, определяется значение ![]() в момент окончания спада тяги
в момент окончания спада тяги ![]() , Нарастание тяги начинается со значения
, Нарастание тяги начинается со значения ![]() (блоки 23-25).
(блоки 23-25).
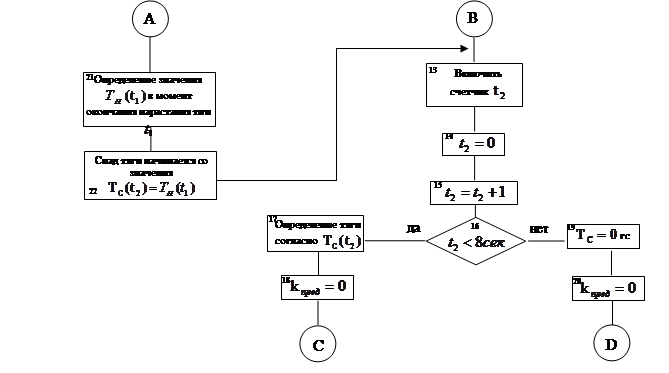
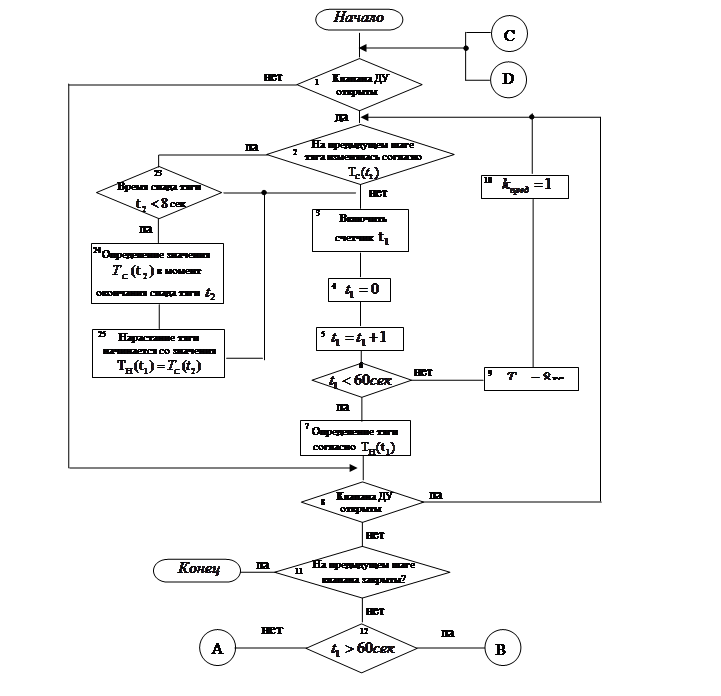
Рисунок 8. Алгоритм работы ПРТ
БФТ передает значения тяги ![]() ,
, ![]() в КСДУ с тактом 50 мс, необходимые для определения угловой скорости движения динамических стендов
в КСДУ с тактом 50 мс, необходимые для определения угловой скорости движения динамических стендов![]() .
.
Вывод
Разработка комплекса имитации двигательной установки позволила имитировать в лабораторных условиях работу двигательной установки, с учетом промежутков нарастания и спада тяги ДУ, что обеспечило более точную имитацию движения КА, работу комплекса полунатурного моделирования при наземных испытаниях СОС КА, а следовательно, улучшило качество испытаний КА.
Рецензенты:
Ловчиков А.Н., д.т.н., профессор, профессор кафедры систем автоматического управления, Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Сибирский государственный аэрокосмический университет имени академика М.Ф. Решетнева», г. Красноярск.
Попов А.М., д.ф.-м.н., профессор, директор Института информатики телекоммуникаций, Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Сибирский государственный аэрокосмический университет имени академика М.Ф. Решетнева», г. Красноярск.
Библиографическая ссылка
Синицкий Д.Е., Мурыгин А.В. МОДЕЛИРОВАНИЕ РАБОТЫ ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКОГО АППАРАТА ПРИ НАЗЕМНЫХ ИСПЫТАНИЯХ // Современные проблемы науки и образования. 2013. № 5. ;URL: https://science-education.ru/ru/article/view?id=10322 (дата обращения: 01.06.2026).