



Введение. Немаловажными факторами при выборе способа управления объектом являются: простота управления и ценовой диапазон стоимости аппаратуры. В настоящее время в системе управления питателями сырого угля (ПСУ) используются асинхронные двигатели (АД) с короткозамкнутым ротором (КЗ), преобразователи частоты или система плавного пуска.
Для исключения проблем с проскальзыванием, для контроля подачи топлива ПСУ необходимо поддерживать постоянность скорости вращения вала двигателя. Для этой цели подходит преобразователь частоты (ПЧ), при помощи векторного управления которого можно поддерживать жесткие механические характеристики. Но согласно исследованиям [7] стоимость ПЧ значительно превышает стоимость тиристорных регуляторов напряжения (ТРН), на основе которого будет выполнена система плавного пуска.
Так как стартовый момент зависит от загруженности конвейера и пусковые токи могут превышать номинальное значение тока двигателя в несколько раз, то использование системы мягкого пуска позволит уменьшить его величину. Для решения поставленной задачи необходимо построение замкнутой системы для системы мягкого пуска на основе идентификации скорости на основе искусственной нейронной системы (ИНС).
Задачей данной статьи является создание нейросетевого наблюдателя скорости и анализ его работоспособности в системе управления электропривода (ЭП) по схеме ТРН-АД, созданного по данным с датчиков тока и напряжения. Особенностью работы является проверка адекватности работы нейросетевого наблюдателя скорости в системе управления.
Математическое описание процессов, проходящих в асинхронном электродвигателе, имеет вид [2; 5]:
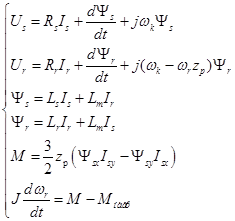 ,
,
где  - векторы напряжения, тока и потокосцепления.
- векторы напряжения, тока и потокосцепления.
Из системы уравнения видно, что скорость вращения вала двигателя зависит от многих параметров: тока, напряжения, потокосцепления, параметров электродвигателя и др. Нейронная сеть (НС) позволяет проводить оценку параметра по данным небольшого количества входных данных. Таким образом была создана нейронная сеть для оценивания скорости вращения вала АД по данным только с датчиков тока и напряжения.
Имитационная модель системы ТРН-АД представлена на рисунке 1. Управление системой происходит при поступлении на вход системы задания по скорости. В блоке Subsystem 1 происходит синхронизация системы управления с питающей сетью («ловится» момент перехода питающего напряжения через «0»). Далее полученный сигнал, значение угла открытия тиристора подается на блок системы импульсно-фазового управления (СИФУ), в котором рассчитывается значение времени открытия тиристоров. В блоке Subsystem 2 смоделирован блок тиристоров. Так как в схеме использовалась модель асинхронного двигателя в двухфазной системе координат, то необходимо использовать блок Subsystem 3, для преобразования координат из трехфазной в двухфазную.
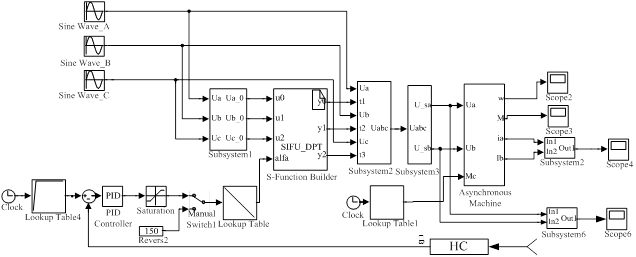
Рис. 1. Имитационная модель электропривода по схеме ТРН‑АД
Нейросетевой наблюдатель скорости. При разработке нейросетевого наблюдателя использовалась структура сети, на входе которого имеется 13 нейронов, скрытый слой состоит из двух слоев по 43 и 111 нейронов в каждом, а выходной из – 1. В качестве функции активации скрытого слоя была выбрана логистическая функция
![]() [8]
[8]
Тренировочный набор для НС наблюдателя был получен на основе имитационной модели, представленной на рисунке 1. Входными параметрами являлись: среднеквадратичное значение напряжения и его задержка, среднеквадратичное значение тока и его задержка, момент двигателя и его задержки. Для тренировочного набора были представлены значения тока и напряжения, над которыми было произведено интегрирование и дифференцирование. Выходным параметром для обучения нейронного наблюдателя являлся вектор заданных значений скорости. Для уменьшения ошибки и быстроты вычислений при обучении использовался метод Левенберга-Марквардта [6]. Данный метод оптимально подходит для обучения нейронной сети, результаты получаются с небольшими затратами вычислительной мощности машины по сравнению с другими методами обучения. Тренировочный набор составлялся для различных значений скорости задания, активной и вентиляторной нагрузки.
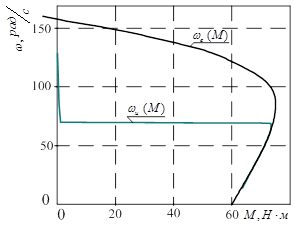
Рис. 2. Механическая естественная и искусственная характеристики
Результаты исследования. Обучение НС, проверка работоспособности наблюдателя скорости проводились в программной среде Matlab 7.10.0. [3], графики переходных процессов в АЭП при пуске и набросе нагрузки представлены на рис. 3.
Для оценки качества переходных процессов управления используется модульная оценка качества [1; 4]:
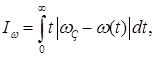
где ![]() - сигнал задания скорости;
- сигнал задания скорости; ![]() - управляемая переменная.
- управляемая переменная.
Величина динамических отклонений и его длительность оценивается интегральной оценкой. Чем меньше величина оценки, тем лучше качество процесса управления.
Помимо интегральной оценки, производилось исследование среднеквадратичной ошибки оценивания скоростей, приведенных к номинальным значениям скорости:
где ![]() - идентифицируемый сигнал скорости на шаге интегрирования
- идентифицируемый сигнал скорости на шаге интегрирования ![]() ;
; ![]() – оценка сигнала скорости на шаге интегрирования
– оценка сигнала скорости на шаге интегрирования ![]() ;
; ![]() - номинальное значение сигнала скорости.
- номинальное значение сигнала скорости.
На основании математической модели исследовались механические характеристики замкнутого электропривода, рис. 2. Из рисунка можно видеть, что при скорости задания ![]() модель отрабатывает заданное значение. Механическая характеристика характеризуется абсолютной жесткостью.
модель отрабатывает заданное значение. Механическая характеристика характеризуется абсолютной жесткостью.
а) 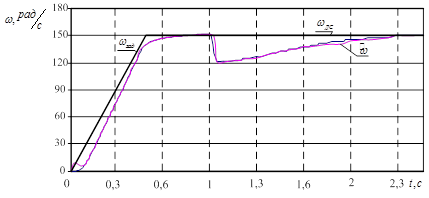
б) 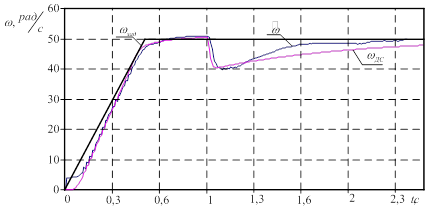
Рис. 3. Графики переходного процесса с датчиком скорости ![]() и нейросетевым наблюдателем скорости
и нейросетевым наблюдателем скорости ![]() по сравнению со скоростью задания
по сравнению со скоростью задания ![]() : а)
: а) ![]() ; в)
; в) ![]()
В таблице 1 представлены показатели качества переходных процессов АЭП с контуром скорости, замкнутого по сигналу с датчика и наблюдателя скорости, из которого видно, что статическая ошибка, модульная среднеквадратичная оценки качества при уменьшении скорости задания увеличиваются. В системе имеется провал скорости, но в случае использования нейроэмулятора скорости время восстановления скорости задания меньше.
Таблица 1 - Показатели качества переходных процессов АЭП с контуром скорости, замкнутого по сигналам с датчика и наблюдателя
|
|
Задание на скорость |
Модульная оценка качества, |
Среднеквадратичная оценка качества, |
Статическая ошибка, % от |
Провал скорости, % от |
|
|
Система ТРН-АД |
Датчик скорости |
50 |
11,4 |
7 |
10 |
25 |
|
Нейроэмулятор скорости |
50 |
8,3 |
6,3 |
1,5 |
19 |
|
|
Датчик скорости |
150 |
9,5 |
5 |
1,3 |
20 |
|
|
Нейроэмулятор скорости |
150 |
7,4 |
4,4 |
1 |
15 |
|
Заключение
Был разработан нейроэмулятор скорости для асинхронного электропривода с тиристорным регулятором напряжения, позволяющий идентифицировать значения скорости по данным сигналов тока, напряжения и момента.
Недостатком нейросетевого наблюдателя является то, что он не очень чувствителен к изменению параметров привода.
Работа выполнена в рамках государственного задания «Наука» 7.2826.2011 «Разработка и создание гибридной модели энергоблоков электростанций».
Рецензенты:
Усов Ю.П., д.т.н., профессор кафедры ЭСиЭ ЭНИН ФГБОУ ВПО «Национальный исследовательский Томский политехнический университет», г. Томск.
Исаев Ю.Н., д.ф.-м.н., профессор кафедры ЭСиЭ ЭНИН ФГБОУ ВПО «Национальный исследовательский Томский политехнический университет», г. Томск.
Библиографическая ссылка
Козлова Л.Е. РАЗРАБОТКА И ИССЛЕДОВАНИЕ СИСТЕМ ЗАМКНУТОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА ПО СХЕМЕ ТРН-АД С НЕЙРОСЕТЕВЫМ НАБЛЮДАТЕЛЕМ СКОРОСТИ // Современные проблемы науки и образования. 2013. № 5. ;URL: https://science-education.ru/ru/article/view?id=10174 (дата обращения: 07.07.2026).