


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
ANALYSIS OF TWO-PHASE OPERATION OF INFORMATION-MEASURING SYSTEM BASED ON THE SENSOR WITH MOVED MAGNETIC FIELD

Введение
Развитие ИИС управления и контроля предполагает широкое использование датчиков.
ЭМС с бегущим магнитным полем позволила создать датчик контроля биений вала на основе двухкоординатного датчика ускорений обмотки [5]. Данный датчик биений вала представляет собой статор, во внутренние пазы которого уложены синусная, косинусная и так называемая равномерная обмотки [1]. Во внутреннее пространство статора вводится вал, на биения которого и должен реагировать датчик и положение которого контролируется чувствительным элементом. Датчик в полном объеме контролирует положение вала в любой момент времени.
Сущность биения вала заключается в том, что его геометрическая ось смещается от своего исходного положения, совпадающего с магнитной осью статора. При этом между названными осями появляется смещение. Воздушный зазор, представляющий функцию от пространственного угла, по его длине оказывается при этом величиной переменной, зависящей как от самого смещения, так и от направления смещения вала. При отсутствии в статоре датчика контролируемого вала либо отсутствии биения вала магнитное поле в зазоре является однородным, и выходное напряжение датчика равно нулю. При смещении оси вала относительно оси датчика магнитное поле в зазоре становится неоднородным. Это, в соответствии с принципом действия датчиков с бегущим магнитным полем [1], приводит к появлению ненулевого выходного напряжения датчика, несущего в себе информацию о смещении и направлении смещения вала.
ИИС для измерения биений вала на базе ЭМС с бегущим магнитным полем
При работе датчика ЭМФ в двухфазном режиме для создания бегущего магнитного поля используется двухфазный или трехфазный источник питания. Блок-схема ИИС для измерения биений вала, ЭМС которого работает в двухфазном режиме, представлена на рисунке 1.
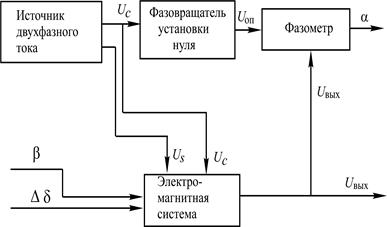
Рисунок 1
ИИС в этом случае состоит из двухфазного генератора, электромагнитной системы, фазовращателя опорного напряжения и фазометра. В том случае, когда ось вала совпадает с осью ЭМС, на выходе последней напряжение будет равно нулю. При смещении оси вала относительно оси ЭМС на выходе ЭМС появляется напряжение ![]() , пропорциональное смещению. Начальная фаза этого напряжения α будет отражать направление смещения вала. Фазовращатель установки нуля необходим для определения направления, которое принимается за нулевое [2].
, пропорциональное смещению. Начальная фаза этого напряжения α будет отражать направление смещения вала. Фазовращатель установки нуля необходим для определения направления, которое принимается за нулевое [2].
Таким образом, входными величинами ИИС являются напряжение питания источника электрической энергии, величина и направление смещения вала. Выходной величиной является напряжение, пропорциональное смещению вала, и фазовый сдвиг выходного напряжения относительно опорного напряжения, определяющий направление смещения [4].
Для определения режима работы генератора необходимо знать, прежде всего, закон изменения входного сопротивления ЭМС при изменении измеряемого перемещения, которое зависит от параметров ЭМС.
Для получения передаточной функции ИИС необходимо знать параметры генератора, электронных блоков структурной схемы и редукционного ЭМС с продольным магнитным полем.
Схема замещения ИИС на базе ЭМС с бегущим магнитным полем
Электрическая цепь ЭМС – это параметрическая цепь с взаимной индуктивностью. Основным элементом, влияющим на параметры обмоток, является вал с возможностью перемещения, что приводит к изменению и индуктивностей обмоток, и коэффициентов взаимной индуктивности.
Основная цель последующего анализа заключается в определении условий работы генераторов, питающих ЭМС, и функции преобразования, т.е. зависимости, связывающей выходные параметры – амплитуду и начальную фазу выходного напряжения со смещением и направлением смещения вала относительно статора ЭМС.
Особенность конструкции ЭМС заключается в наличии следующих основных элементов и явлений:
1) все обмотки выполнены проводниками различной длины и поперечного сечения;
2) обмотки имеют активные и пассивные части;
3) часть магнитного потока, создаваемого намагничивающей силой обмотки, не сцепляется с другими обмотками;
4) магнитные потоки активных и пассивных сторон обмоток проходят по магнитопроводу, в котором имеются потери энергии на перемагничивание и на вихревые токи;
5) магнитная связь обмоток обусловлена положением вала, в котором имеют место потери энергии на перемагничивание и вихревые токи;
6) на схеме замещения каждая из обмоток должна быть представлена индуктивностью рассеяния, индуктивностью активных и пассивных сторон обмоток.
Таким образом, эквивалентная схема замещения ЭМС будет выглядеть так, как показано на рисунке 2 [3].
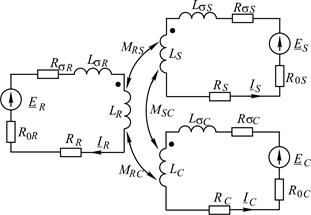
Рисунок 2
На схеме замещения генераторы каждого контура цепи представляются в форме идеальных источников электродвижущей силы, включенных последовательно с внутренними сопротивлениями, которые будем считать резистивным. Внутренние сопротивления источников представлены резисторами ![]() .
.
На схеме:
![]() - внутренние сопротивления источников синусоидального тока равномерной, синусной и косинусной обмотки;
- внутренние сопротивления источников синусоидального тока равномерной, синусной и косинусной обмотки;
![]() - электродвижущие силы соответствующих источников;
- электродвижущие силы соответствующих источников;
![]() - сопротивления проводников соответствующих обмоток;
- сопротивления проводников соответствующих обмоток;
![]() - индуктивности рассеяния соответствующих обмоток;
- индуктивности рассеяния соответствующих обмоток;
![]() - сопротивления, отражающие потери в магнитопроводе соответствующих обмоток;
- сопротивления, отражающие потери в магнитопроводе соответствующих обмоток;
![]() - рабочие индуктивности обмоток;
- рабочие индуктивности обмоток;
![]() - взаимные индуктивности обмоток;
- взаимные индуктивности обмоток;
Используя оператор ![]() , запишем сопротивление контура равномерной обмотки:
, запишем сопротивление контура равномерной обмотки:
![]() .
.
Сопротивление контура синусной обмотки:
![]()
Сопротивление контура косинусной обмотки:
![]()
Следует обратить внимание, что в приведенных уравнениях для определения сопротивлений контуров комплексные индуктивности обмоток представлены здесь в форме идеальных индуктивностей и активных сопротивлений, отражающих потери в магнитопроводе.
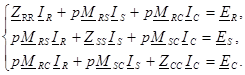
Обобщенная система уравнений электрического состояния ИИС биений вала
Обобщенная система уравнений для вычисления токов источников и приемников при наличии источников во всех ветвях схемы будет выглядеть следующим образом:
Для вычисления токов ветвей и выходных напряжений необходимо получить выражения алгебраических дополнений и главного определителя системы. Главный определитель системы:
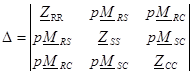 ;
;
![]() .
.
Матрица коэффициентов при неизвестных симметрична относительно главной диагонали, поэтому можно записать:
![]() ,
, ![]() ,
, ![]() .
.
Запишем уравнения для вычисления алгебраических дополнений:
![]() ;
;
![]() ;
;
![]() .
.
Следующие алгебраические дополнения:
![]() ;
;
![]() ;
;
![]() .
.
Двухфазный режим работы ИИС биений вала
Данный режим характеризуется тем, что синусная и косинусная обмотки получают питание от двухфазного источника питания. Выходным рабочим напряжением является напряжение равномерной обмотки.
В том случае, когда ![]() , а
, а ![]() , ток синусной обмотки определяется выражением:
, ток синусной обмотки определяется выражением:
 .
.
Полученное выражение для вычисления тока равномерной обмотки позволяет судить о функции преобразования ИИС с ЭМС, работающей в двухфазном режиме.
Выходным параметром является напряжение, равное произведению тока равномерной обмотки на сопротивление нагрузки. Выходное напряжение в идеальном случае должно быть пропорциональным смещению вала.
На рисунке 3 представлена зависимость выходного напряжения от смещения вала и направления смещения.
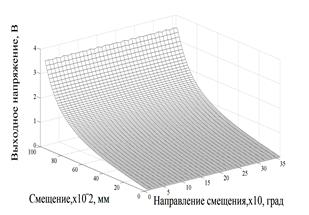
Рисунок 3
Очевидно, что мы имеем дело с нелинейной поверхностью. В зависимости от требуемой погрешности предельное смешение, измеряемое ЭМС, может быть ограничено. Хорошая линейность сохраняется в пределах 20…30 процентов от длины зазора.
Направление смещения вала определяется и численно равно фазе выходного напряжения. Поверхность, представленная на рисунке 4 и представляющая зависимость фазы выходного напряжения от смещения и направления смещения, является нелинейной поверхностью.
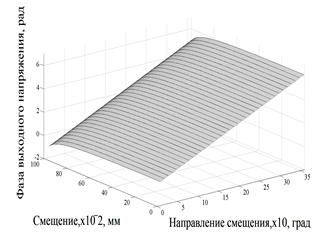
Рисунок 4
Линейная зависимость практически сохраняется при смещениях, составляющих 30…40 процентов от длины зазора. Этот диапазон смещений и является рабочей областью датчика.
Важную роль в работе ЭМС играет входное сопротивление синусной и косинусной обмоток, на которые нагружен двухфазный генератор. От величины этого сопротивления зависит режим работы генератора. О значениях входных сопротивлений можно судить по законам изменения токов этих обмоток и их начальных фаз.
Уравнение для вычисления тока синусной обмотки можно получить из системы уравнения, представленной выше:

Формула, описывающая закон изменения тока синусной обмотки, довольно сложная с учетом того, что индуктивности обмоток и их взаимные индуктивности изменяются по сложным законам в функции геометрических размеров электромагнитной системы.
С помощью компьютерной модели, разработанной с использованием среды MatLAB, были получены графики зависимости действующего значения тока синусной обмотки и его начальной фазы в зависимости от величины смещения вала и его начальной фазы от тех же величин соответственно.
Анализ графиков приводит к очевидному выводу о том, что при малых перемещениях, составляющих примерно треть зазора, ток обмотки и его фаза изменяются незначительно, что указывает на незначительное изменение входного сопротивления. Таким образом, синусный выход генератора работает в условиях незначительного изменения сопротивления нагрузки. К аналогичному выводу приходим в процессе анализа поведения тока косинусной обмотки. В соответствии с полученными в ходе математического моделирования результатами при малых смещениях вала ток косинусной обмотки изменяется незначительно.
Двухфазный режим работы ЭМФ характеризуется тем, что косинусная обмотка получает питание от источника синусоидальной ЭДС, начальную фазу которой примем равной нулю. Синусная обмотка в этом случае должна получать питание от источника синусоидальной ЭДС с амплитудой, равной амплитуде источника косинусной обмотки, но с начальной фазой, равной ![]() .
.
Заключение
В результате анализа двухфазного режима работы информационно-измерительной системы на основе датчика биений вала с бегущим магнитным полем можно сделать следующие выводы.
1. При работе ИИС с ЭМС, работающей в двухфазном режиме, ток генераторов при малых перемещениях изменяется незначительно по фазе и амплитуде, что указывает на слабую зависимость входного сопротивления датчика от измеряемого перемещения. Генератор, таким образом, работает в нормальном режиме.
2. Схема замещения системы с ЭМС, работающей в однофазном режиме, отличается от схемы замещения измерительной электромагнитной системы с ЭМС, работающей в двухфазном режиме, только расположением источника питания. При этом начальная фаза этого источника пропорциональна измеряемому перемещению.
3. Неравенство сопротивлений обмоток ЭМС приводит к возникновению дополнительной погрешности измерений.
4. Функция преобразования ИИС с фазовыми датчиками достаточно проста. Однако зависимость изменения фазы от перемещения и от параметров элементов измерительной системы выражается достаточно громоздкой формулой, не позволяющей получить аналитической зависимости погрешности от параметров ЭМС.
Рецензенты:
Горячев Владимир Яковлевич, д.т.н., доцент, заведующий кафедрой «Автоматизированные электроэнергетические системы», ФГБОУ ВПО «Пензенский государственный университет», г. Пенза.
Чернецов Владимир Иванович, д.т.н., профессор, заместитель директора ПРЦВШ(ф)ФГБОУ ВПО РГУИТП, заведующий кафедрой «Управление инновациями», Пензенский филиал ФГБОУ ВПО РГУИТП, г. Пенза.
Библиографическая ссылка
Гаврина О.В., Шатова Ю.А. АНАЛИЗ ДВУХФАЗНОГО РЕЖИМА РАБОТЫ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ НА ОСНОВЕ ДАТЧИКА БИЕНИЙ ВАЛА С БЕГУЩИМ МАГНИТНЫМ ПОЛЕМ // Современные проблемы науки и образования. 2013. № 2. ;URL: https://science-education.ru/en/article/view?id=8942 (дата обращения: 21.06.2026).