


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
MATHEMATICAL MODEL OF DECISION-MAKING BY THE ROBOT AND ITS PROGRAM REALIZATION

Иногда у людей возникает проблема выбора, связанная с принятием или непринятием различных точек зрения на различные жизненные ситуации. При этом, делая выбор, люди руководствуются теми или иными знаниями, собственным опытом, различными фактами или зачастую мнением людей, которым они доверяют или к которым они привязаны. Например, выпускники школы часто прислушиваются к своим родителям при выборе дальнейшего места учебы.
Наверняка в перспективе в процессе развития современных технологий и науки неотъемлемой частью человеческого общества станут и роботы. При этом с полной долей уверенности можно говорить, что у роботов по мере их усложнения и совершенствования возникнет проблема выбора в условиях социальной привязанности, характерная для людей.
Согласно современным определениям, привязанность - это чувство близости, основанное на глубокой симпатии, преданности кому- или чему-либо; поиск и установление эмоциональной близости с другим человеком [2; 7].
Основоположником теории привязанности является известный английский психиатр и психоаналитик, специалист в области психологии развития, психологии семьи, психоанализа и психотерапии Джон Боулби [1]. В своей книге «Эмоциональная машина» [10] Марвин Минский анализирует работы Боулби и ряда других психологов и строит ряд абстрактных моделей того, как работает человеческий мозг, включая то, как привязанность может влиять на цели и действия людей. Несомненным преимуществом анализа, проведенного Минским, является максимальная общность предлагаемых моделей. В то же время Минский не дает каких-либо конкретных рекомендаций по применению данных моделей.
Современная робототехника стоит на пути построения математических моделей привязанности роботов к их владельцам и определения поведения роботов в зависимости от этой привязанности. В этом направлении можно выделить следующие известные проекты: японский робот-пес Aibo, робот-тюлененок PARO, робот-динозаврик PLEO [3-6].
В настоящей статье предлагаются математическая модель привязанности робота и алгоритм принятия решения роботом в условиях данной привязанности. Модель и алгоритм строятся на основе следующих псевдоэмоциональных характеристик робота.
Псевдоэмоциональные характеристики робота и привязанность
Из теории психологии человека известно, что эмоции являются ответной реакцией организма на некий раздражитель-стимул. Для роботов этот стимул будем называть сюжетом, и пусть он имеет следующее определение.
Пусть t - время.
Функцию S(t) будем называть сюжетом, если она обладает следующими свойствами:
- Область определения S(t):
 .
.  для любого
для любого  .
.- S(t) - непрерывная и взаимнооднозначная функция на
 .
.
Функцию f(t), удовлетворяющую соотношению  , где
, где  - произвольная функция, назовем функцией внутренних переживаний робота (область определения f(t), и S(t) совпадают).
- произвольная функция, назовем функцией внутренних переживаний робота (область определения f(t), и S(t) совпадают).
Функцию внутренних переживаний робота M(t) назовем псевдоэмоцией робота, если она удовлетворяет условиям:
- Область определения M(t) :
 .
. - M(t) - дифференцируемая на
 , непрерывная и однозначная функция на
, непрерывная и однозначная функция на  .
.  и
и  .
.- В области определения существует единственная точка z, такая, что:
 и
и  .
.
Легко видеть, что, например, функция  для
для  ,
,  , является псевдоэмоцией.
, является псевдоэмоцией.
Под псевдовоспитанием робота, или просто псевдовоспитанием, будем понимать относительно устойчивое отношение робота к сюжету.
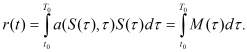
Элементарным псевдовоспитанием робота r(t) на сюжете S(t) назовем функцию вида:
Будем считать, что с течением времени робот забывает псевдоэмоции, которые он когда-то испытывал. Прошлые псевдоэмоции все меньше и меньше сказываются на его текущем псевдовоспитании. А вместе с тем забываются и прошлые элементарные псевдовоспитания, порождаемые испытываемыми ранее псевдоэмоциями робота.
Исходя из этого, введем следующее определение.
Псевдовоспитанием робота R(t) (псевдовоспитание робота во время действия псевдоэмоции) на сюжете S(t) назовем функцию вида:
 ,
,
где t - текущее время,  . Текущее время удовлетворяет соотношению
. Текущее время удовлетворяет соотношению  , где
, где  - время действия текущей псевдоэмоции от начала ее проявления,
- время действия текущей псевдоэмоции от начала ее проявления,  - время функционирования (псевдовоспитания) робота, до появления текущей псевдоэмоции,
- время функционирования (псевдовоспитания) робота, до появления текущей псевдоэмоции,  - псевдовоспитание, полученное роботом ко времени
- псевдовоспитание, полученное роботом ко времени  . Нижний индекс
. Нижний индекс  означает, что до момента действия текущей псевдоэмоции робот уже испытал
означает, что до момента действия текущей псевдоэмоции робот уже испытал  псевдоэмоций. Кроме этого, будем подразумевать, что процесс псевдовоспитания является непрерывным в том смысле, что на смену одной псевдоэмоции приходит сразу же другая псевдоэмоция, порожденная очередным сюжетом с порядковым номером
псевдоэмоций. Кроме этого, будем подразумевать, что процесс псевдовоспитания является непрерывным в том смысле, что на смену одной псевдоэмоции приходит сразу же другая псевдоэмоция, порожденная очередным сюжетом с порядковым номером  .
.
Коэффициент  будем называть коэффициентом памяти прошлых событий, или коэффициентом памяти.
будем называть коэффициентом памяти прошлых событий, или коэффициентом памяти.
Под псевдовоспитательным процессом будем понимать процесс изменения значения функции псевдовоспитания робота. В начальный момент времени значение функции псевдовоспитания робота равно нулю.
Таким образом, будем считать что величина функции псевдовоспитания  будет показывать привязанность робота к некоторому субъекту, который ассоциируется с воздействием на робота последовательностью сюжетов
будет показывать привязанность робота к некоторому субъекту, который ассоциируется с воздействием на робота последовательностью сюжетов  . Если на робота оказывается воздействие со стороны n различных субъектов, каждый из которых характеризуется последовательностью раздражителей:
. Если на робота оказывается воздействие со стороны n различных субъектов, каждый из которых характеризуется последовательностью раздражителей:  , где k - порядковый номер субъекта, mk - количество сюжетов воздействия со стороны k-го субъекта, то величины функций псевдовоспитания
, где k - порядковый номер субъекта, mk - количество сюжетов воздействия со стороны k-го субъекта, то величины функций псевдовоспитания  - показывают привязанность робота относительно каждого из воздействующих субъектов. В дальнейшем будем предполагать, что коэффициенты памяти робота могут быть различным в зависимости от каждого конкретного воздействующего сюжета.
- показывают привязанность робота относительно каждого из воздействующих субъектов. В дальнейшем будем предполагать, что коэффициенты памяти робота могут быть различным в зависимости от каждого конкретного воздействующего сюжета.
Принятие решения роботом в условиях социальной привязанности
Предположим, что перед роботом возникает проблема выбора, которая заключается в следующем: робот должен принять некоторое решение относительно своих дальнейших действий или поведения. При этом робот должен учитывать свои социальные связи и социальную привязанность к владельцу при принятии решения. Например, когда два человека дают роботу одновременно две взаимоисключающие команды, робот должен принять решение в пользу той или иной команды, в зависимости от своей привязанности к каждому из людей-владельцев робота.
Пусть на робота действует n различных субъектов с последовательностями раздражителями-сюжетами: . Таким образом, к некоторому моменту времени функционирования робота у него сложились псевдовоспитания относительно каждого из раздражителей, то есть относительно каждого из воздействующих субъектов.
Принимая в качестве меры привязанности робота относительно каждого из воздействующих субъектов, можем сформулировать простое правило принятия роботом решения в пользу того или иного владельца робота: решение принимается в пользу того владельца, относительно которого сформировалось максимальное псевдовоспитание. Если псевдовоспитания относительно нескольких субъектов равны между собой, то решение может быть не принято вовсе или принято случайным образом.
Опишем программную реализацию модели принятия решения роботом в условиях привязанности на примере одного типа раздражителя-сюжета, а именно на примере такого сюжета, как громкость звукового сигнала.
Будем считать, что каждый из взаимодействующих с роботом владельцев оказывает на него воздействие громкостью звукового сигнала. Согласно работе [8], в этом случае функция изменения громкости звукового сигнала  удовлетворяет определению сюжета. Кроме того, определению сюжета удовлетворяют и другие функции:
удовлетворяет определению сюжета. Кроме того, определению сюжета удовлетворяют и другие функции:  функция среднего значения громкости звукового сигнала и функция
функция среднего значения громкости звукового сигнала и функция  , где t0- время начала действия звукового сигнала, T0 - время окончания действия звукового сигнала.
, где t0- время начала действия звукового сигнала, T0 - время окончания действия звукового сигнала.
Для компьютерной реализации модели принятия роботом решений в качестве функции псевдоэмоции робота целесообразно принять функцию вида:
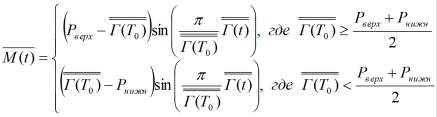 ,
,
где  - константа, определяющая величину верхнего порога отсутствия псевдоэмоции робота,
- константа, определяющая величину верхнего порога отсутствия псевдоэмоции робота,  - константа, показывающая величину нижнего порога отсутствия псевдоэмоции робота [8].
- константа, показывающая величину нижнего порога отсутствия псевдоэмоции робота [8].
Опишем основные возможности программной системы SoundSelectBot [9], моделирующей «психологические» процессы у робота при принятии решений в пользу одного владельца из совокупности владельцев, общающихся с роботом посредством голоса.
Для работы программы в качестве входных «психологических» параметров робота необходимо задать следующие характеристики.
- Коэффициенты памяти робота (каждому владельцу, общающемуся с роботом, отвечает свой коэффициент памяти робота).
- Длительность возникающих у робота псевдоэмоций.
- Верхний и нижний порог отсутствия псевдоэмоции (под отсутствием псевдоэмоции понимается ее нулевое численное значение).
Программа SoundSelectBot позволяет оказывать воздействие на моделируемого робота двумя способами:
- При помощи готовых звуковых файлов в формате .wav.
- В интерактивном режиме, через подключенный микрофон. (Существует возможность сохранения звука, полученного в интерактивном режиме в звуковых файлах в формате .wav.)
Программа SoundSelectBot вычисляет и визуализирует:
- Звуковую волну, оказывающую воздействие на моделируемого робота.
- Псевдоэмоции, испытываемые моделируемым роботом.
- Псевдовоспитания робота относительно каждого из субъектов, оказывающих воздействие на моделируемого робота.
Программная система SoundSelectBot позволяет моделировать процесс выбора робота в условиях привязанности (решение в пользу владельца определяется наибольшей величиной вычисленного программой системой псевдовоспитания) и может быть использована в робототехнических системах, целью которых является необходимость принятия решений в зависимости от личной преданности робота тому или иному владельцу.
Программная система SoundSelectBot реализована на языке С++ в среде Visual Studio 2008, функционирует на персональном компьютере класса IBM/PC под управлением операционной системы Windows XP SP2 и выше. Для работы программной системы необходим .NET Framework 2.0. Для работы в интерактивном режиме также требуется микрофон. Объем программы 105 Кб (exe-файл).
Заключение
Таким образом, в статье представлена модель принятия решения роботом в условиях социальной привязанности. Модель является достаточно простой, но в то же время не исключающей общности, что является несомненным преимуществом. Для того чтобы применить модель в конкретной предметной ситуации, достаточно определить всего две функции: функцию сюжета и функцию псевдоэмоции, что является одновременно преимуществом и недостатком. Преимущество заключается в том, что этих функций всего две. С другой стороны, определить конкретный вид данных функций вне зависимости от предметной области не представляется возможным.
Кроме этого, в статье было представлено описание реализации модели в виде программной системы SundSelectBot на примере такого раздражителя-сюжета, как громкость звукового сигнала.
Рецензенты
Пенский Олег Геннадьевич, доктор технических наук, профессор кафедры процессов управления и информационной безопасности Пермского государственного национального исследовательского университета, г. Пермь.
Ясницкий Леонид Нахимович, доктор технических наук, профессор, заведующий кафедрой прикладной информатики Пермского государственного педагогического университета, г. Пермь.
Ильмушкин Георгий Максимович, д.п.н., профессор, заведующий кафедрой высшей математики, Димитровградский инженерно-технологический институт - филиал Национального исследовательского ядерного университета МИФИ, г. Димитровград.
Библиографическая ссылка
Черников К.В. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ПРИНЯТИЯ РЕШЕНИЯ РОБОТОМ И ЕЕ ПРОГРАММНАЯ РЕАЛИЗАЦИЯ // Современные проблемы науки и образования. 2012. № 5. ;URL: https://science-education.ru/en/article/view?id=7324 (дата обращения: 01.07.2026).