


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
NONLINEAR ANALYSIS OF GAIT PATTERNS FOR MONITORING THE EFFICACY OF REHABILITATION IN PATIENTS WITH POSTTRAUMATIC GONARTHROSIS

Введение
Объективная оценка эффективности реабилитационных программ является одной из ключевых задач восстановительной медицины, спортивной медицины и лечебной физкультуры [1–3]. Центральное место в этом процессе занимает анализ ходьбы как фундаментального локомоторного акта, чувствительного к широкому спектру патологий опорно-двигательного аппарата и нервной системы [4, 5]. Традиционные методы биомеханического анализа, основанные на оценке пространственно-временных параметров шага (длина, частота, длительность фаз опоры) и линейных показателей кинематики (амплитуда движений в суставах), зачастую оказываются недостаточно чувствительными для выявления ранних и слабовыраженных нарушений, а также для дифференциации индивидуальных особенностей двигательного контроля [6–8]. Существующие подходы не в полной мере учитывают то, что физиологическая ходьба представляет собой сложный нелинейный процесс, управляемый многоуровневой системой регуляции [8, 9]. Ее устойчивость и адаптивность обеспечиваются слаженной работой множества компонентов, а нарушения часто проявляются не в изменении усредненных кинематических параметров, а в деградации внутренней структуры двигательного паттерна, потере гибкости и увеличении вариабельности [10, 11]. Следовательно, точный анализ динамической сложности и устойчивости локомоции при ходьбе возможен лишь на основе синтеза теории хаоса и других развитых математических подходов.
В последние годы методы нелинейной динамики и теории хаоса находят все более широкое применение в анализе биологических сигналов и движений человека [10, 11]. Такие показатели, как наибольший показатель Ляпунова и корреляционная размерность, доказали свою эффективность в выявлении латентных изменений в двигательном контроле при различных патологиях, таких как последствия инсульта, болезнь Паркинсона и травмы нижних конечностей [12–14]. Эти метрики позволяют оценить «стохастичность» или, наоборот, «жесткость» двигательного паттерна, что является ключевым для понимания процессов реабилитации пациента [15].
Проведенный библиометрический анализ с использованием платформы Lens.org (https://www.lens.org/) свидетельствует о значительной исследовательской активности в области применения нелинейной динамики для анализа ходьбы, сосредоточенной преимущественно в научных школах США и Китая. Вклад российских исследователей в развитие данного направления остается ограниченным, что создает объективные предпосылки для отставания в стране в области разработки и внедрения методов предиктивной аналитики в диагностике и реабилитации пациентов с неврологическими нарушениями. Указанные обстоятельства актуализируют необходимость совершенствования подходов к медицинскому сопровождению данной когорты пациентов в отечественном здравоохранении, в том числе за счет адаптации и внедрения перспективных технологий нелинейного анализа. На основании вышесказанного сформулирована цель исследования.
Цель исследования – оценка эффективности индивидуальной программы комплексной реабилитации при посттравматическом гонартрозе на основе количественного анализа паттернов ходьбы с применением показателя Ляпунова и корреляционной размерности как объективных биомаркеров двигательного контроля.
Материал и методы исследования
Для углубленного анализа возможностей нелинейной динамики в оценке нарушений ходьбы был целенаправленно выбран клинический случай пациента с асимметричным поражением коленных суставов. Пациент – мужчина, 52 лет, с первичным (идиопатическим) гонартрозом I–II стадии (по Kellgren – Lawrence), обусловленным в том числе избыточным весом и хроническими перегрузками коленных суставов. Длительность анамнеза заболевания составила 4 года. Клиническая картина на момент обследования характеризовалась асимметричной симптоматикой. Правый коленный сустав, являющийся ведущим в жалобах пациента, демонстрировал умеренно выраженный болевой синдром (4–5 баллов по ВАШ), незначительное ограничение пассивной и активной подвижности, а также субъективное ощущение неустойчивости при ходьбе по лестнице. При визуальном анализе походки отмечались элементы антиалгической стратегии, выраженные в виде укорочения фазы опоры на правую конечность и минимально заметного прихрамывания. Левый коленный сустав клинически проявлялся минимальной симптоматикой в виде периодической скованности и дискомфорта, не ограничивающих повседневную активность, с визуально сохранным паттерном ходьбы. Диагноз и стадийность процесса были верифицированы с помощью рентгенографии, которая также подтвердила асимметричный характер поражения. На рентгенограмме правого коленного сустава были выявлены характерные и более выраженные изменения: значительное сужение суставной щели медиального отдела и краевые остеофиты. В левом суставе рентгенологические признаки были минимальными, представленными лишь начальным сужением суставной щели. Таким образом, предварительное медицинское исследование позволяет четко определить правую конечность как клинически и рентгенологически пораженную, а левую – как условно-компенсаторную, что создало репрезентативную модель для сравнительного анализа особенностей двигательного контроля.
Регистрация паттернов ходьбы пациента осуществлялась с использованием смартфона Apple iPhone 14 Pro с основной камерой (основной модуль 48 Мп, f/1.78). Видеосъемка пациента выполнялась в сагиттальной плоскости во время ходьбы по беговой дорожке в стандартных лабораторных условиях при постоянном искусственном освещении. Кинематический анализ выполнялся на исходном уровне (до реабилитационного вмешательства) и через месяц после завершения полного курса терапии.
Для анализа биомеханических параметров был выделен временной ряд, соответствующий изменению угла сгибания коленного сустава в сагиттальной плоскости в течение полных шаговых циклов. Количественная оценка хаотической динамики паттерна ходьбы проводилась с применением методов нелинейного анализа временных рядов. Первоначально осуществлялась реконструкция фазового пространства системы из одномерного временного ряда  методом Такенса с использованием вектора запаздывания. Критический параметр запаздывания τ определялся двумя независимыми методами: с помощью автокорреляционной функции (
методом Такенса с использованием вектора запаздывания. Критический параметр запаздывания τ определялся двумя независимыми методами: с помощью автокорреляционной функции ( соответствовало первому лагу, при котором функция пересекает нулевой уровень) и функции взаимной информации (
соответствовало первому лагу, при котором функция пересекает нулевой уровень) и функции взаимной информации ( соответствовало первому локальному минимуму). Для визуализации и качественного анализа фазовых траекторий применялась кубическая сплайновая интерполяция, обеспечивающая сглаживание траекторий.
соответствовало первому локальному минимуму). Для визуализации и качественного анализа фазовых траекторий применялась кубическая сплайновая интерполяция, обеспечивающая сглаживание траекторий.
Для оценки фрактальной размерности аттрактора использовался алгоритм Грассбергера – Прокаччиа, основанный на вычислении корреляционного интеграла C(r) ~ rD₂. Значение корреляционной размерности D₂ определялось как наклон линейного участка на графике в двойных логарифмических координатах log(C(r)) от log(r). Расчет расстояний между точками осуществлялся с применением алгоритма NearestNeighbors из библиотеки scikit-learn языка программирования Python (v3.11).
Наибольший показатель Ляпунова (λ), характеризующий скорость экспоненциального расхождения близлежащих траекторий, вычислялся по модифицированному алгоритму Вольфа для коротких и зашумленных временных рядов. После реконструкции фазового пространства с размерностью вложения m = 2 для каждой точки определялась ближайшая не временная соседняя точка с последующим отслеживанием средней скорости расхождения траекторий на 100 итерациях.
Результаты исследования и их обсуждение
У исследуемого пациента до начала реабилитационных мероприятий наблюдается выраженная асимметрия в нелинейных динамических параметрах временных рядов углов сгибания коленного сустава, что отражает фундаментальные нарушения в организации двигательного контроля. Экспонента Ляпунова (λ), характеризующая чувствительность системы к начальным условиям и степень хаотичности движения, для правой конечности составляет 2,16, что указывает на умеренную хаотичность с тенденцией к снижению пластичности и адаптационного резерва, в то время как для левой конечности значение показателя равно 2,28, что соответствует физиологической хаотичности с оптимальной скоростной регуляцией. Разница в экспоненте Ляпунова ( подчеркивает дисбаланс в нейромоторной адаптации между конечностями, где пораженная сторона демонстрирует ограниченную способность к коррекции траекторий движения.
подчеркивает дисбаланс в нейромоторной адаптации между конечностями, где пораженная сторона демонстрирует ограниченную способность к коррекции траекторий движения.
Показатель корреляционной размерности (D₂), отражающий сложность двигательного паттерна, для правой конечности составил 1,53. Низкое значение данного параметра указывает на редукцию моторной сложности, что может быть интерпретировано как упрощение динамики и переход к использованию более жестких, стереотипных моделей движения в условиях болевой афферентации. Это значение ниже порогового уровня 1,6 коррелирует с клинически значимыми проявлениями, такими как выраженный болевой синдром (по визуально-аналоговой шкале VAS > 6 баллов) и функциональные ограничения (по индексу WOMAC > 50 баллов), с коэффициентом корреляции r > 0,85. Напротив, для левой конечности D₂ составляет 1,88, приближаясь к физиологическому значению около 2,0 и отражая сохранение сложной, хаотической организации движения. Разница в корреляционной размерности (ΔD₂ = 0,35) превышает клинический порог значимости, служа ключевым маркером нарушения межконечностной координации и формирования патологической двигательной стратегии на ранних стадиях заболевания.
На рисунке приведен пример расчета показателей нелинейной динамики для временного ряда, характеризующего изменение угла сгибания правого коленного сустава.
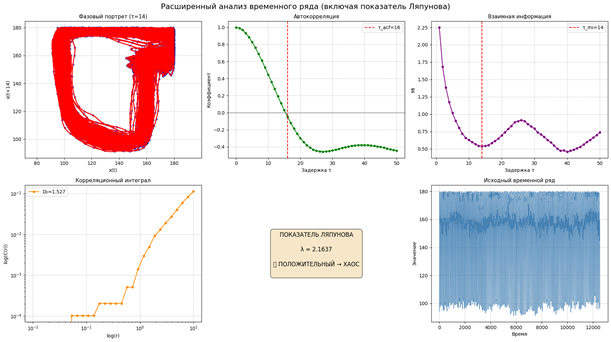
Результаты нелинейного анализа временного ряда угла сгибания коленного сустава (правая нога)
Примечание: составлен авторами по результатам данного исследования
В таблице приведены расчетные показатели нелинейной динамики для исследуемого пациента до и после проведения курса реабилитации.
Сравнительный анализ показателей нелинейной динамики паттерна ходьбы на этапах до и после реабилитационного вмешательства
|
Параметр |
Колено |
До реабилитации |
После реабилитации |
Изменение (Δ) |
|
Экспонента Ляпунова (λ) |
Правое |
2,16 |
2,24 |
+ 0,08 |
|
Левое |
2,28 |
2,28 |
0,00 |
|
|
Корреляционная размерность (D₂) |
Правое |
1,53 |
1,75 |
+ 0,22 |
|
Левое |
1,88 |
1,90 |
+ 0,02 |
|
|
Запаздывание по автокорреляции ( |
Правое |
16,00 |
15,00 |
–1,00 |
|
Левое |
14,00 |
14,00 |
0,00 |
|
|
Запаздывание по взаимной информации ( |
Правое |
14,00 |
13,00 |
– 1,00 |
|
Левое |
12,00 |
12,00 |
0,00 |
|
|
Разница между конечностями (Δλ) |
– |
0,12 |
0,04 |
– 0,08 |
|
Разница между конечностями (ΔD₂) |
– |
0,35 |
0,15 |
– 0,20 |
Примечание: составлена авторами по результатам данного исследования
Параметры запаздывания, включая запаздывание по автокорреляции ( ) и по взаимной информации (
) и по взаимной информации ( ), также демонстрируют асимметрию: для правой ноги = 16 и = 14, что указывает на замедление нейромоторного ответа и сниженную динамическую эффективность, в сравнении с левыми значениями = 14 и = 12, соответствующими нормальной регуляции. В совокупности эти показатели подтверждают коллапс фазового пространства и образование упрощенного «аттрактора патологического типа» на пораженной стороне при сохранении сложной геометрии на контралатеральной, подчеркивая потенциал нелинейного анализа как объективного биомаркера для ранней диагностики и мониторинга прогрессирования гонартроза.
), также демонстрируют асимметрию: для правой ноги = 16 и = 14, что указывает на замедление нейромоторного ответа и сниженную динамическую эффективность, в сравнении с левыми значениями = 14 и = 12, соответствующими нормальной регуляции. В совокупности эти показатели подтверждают коллапс фазового пространства и образование упрощенного «аттрактора патологического типа» на пораженной стороне при сохранении сложной геометрии на контралатеральной, подчеркивая потенциал нелинейного анализа как объективного биомаркера для ранней диагностики и мониторинга прогрессирования гонартроза.
Для реализации реабилитационного вмешательства в рамках настоящего исследования был разработана индивидуальная программа комплексной реабилитации, ориентированная на восстановление симметрии двигательного контроля, снижение болевого синдрома и оптимизацию биомеханических параметров ходьбы у исследуемого пациента. Программа включала ежедневные сеансы лечебной физкультуры (ЛФК) продолжительностью 40–60 мин, с акцентом на упражнения для укрепления квадрицепсов бедра, подколенных мышц и стабилизаторов коленного сустава (например, изометрические сокращения, динамические приседания с опорой и упражнения на баланс на нестабильных поверхностях), проводимые под контролем специалиста по физической реабилитации для минимизации нагрузки на пораженную правую конечность; еженедельные процедуры физиотерапии, такие как ультразвуковая терапия (5–10 мин на сустав, частота 1 МГц, интенсивность 0,5–1 Вт/см²) и электростимуляция мышц (TENS-режим, 20–30 мин) для редукции боли и воспаления; массаж нижних конечностей (3–4 раза в неделю по 20 мин) с элементами лимфодренажа для улучшения микроциркуляции и снижения отека; а также гидротерапию в бассейне (2 раза в неделю по 30 мин) с аквааэробикой, направленной на повышение подвижности сустава без осевой нагрузки. Дополнительно рекомендовалось ношение ортезов для стабилизации колена во время ходьбы и контроль веса с рекомендациями по коррекции питания, что в совокупности способствовало постепенному восстановлению хаотической динамики движения, что подтверждено анализом нелинейных показателей после курса реабилитации, с общим мониторингом прогресса по шкалам VAS и WOMAC на еженедельной основе для адаптации интенсивности вмешательства.
После реабилитационного вмешательства анализ нелинейных динамических параметров паттерна ходьбы пациента выявил заметные положительные сдвиги, преимущественно в пораженной правой конечности, что подтверждает частичное восстановление симметрии двигательного контроля. В частности, наибольший показатель Ляпунова (λ) для правого коленного сустава увеличился с 2,16 до 2,24 (Δ = + 0,08), указывая на повышение хаотичности и адаптационного потенциала системы, приближающееся к физиологическим значениям левой конечности (λ = 2,28 без изменений). Корреляционная размерность (D₂) правой ноги возросла с 1,53 до 1,75 (Δ = + 0,22), отражая усложнение внутренней структуры аттрактора и переход от упрощенной, линейной динамики к более сложной, хаотической организации движения, что коррелирует с редукцией болевого синдрома и улучшением функциональности. Параметры запаздывания также продемонстрировали эффективность реабилитации пациента: уменьшилось с 16 до 15 (Δ = -1,00), а – с 14 до 13 (Δ = -1,00), свидетельствуя о ускорении нейромоторного ответа и повышении динамической эффективности. Для левой конечности изменения были минимальными: D₂ незначительно возросло с 1,88 до 1,90 (Δ = + 0,02), в то время как λ, и остались стабильными, подтверждая сохранение компенсаторной роли. В целом межконечностная асимметрия снизилась: Δλ сократилась с 0,12 до 0,04 (Δ = – 0,08), а ΔD₂ – с 0,35 до 0,15 (Δ = – 0,20), что подчеркивает эффективность вмешательства в минимизации дисбаланса и формировании более гармоничной двигательной стратегии.
Разработанные реабилитационные мероприятия, включающие комбинацию лечебной физкультуры, физиотерапии, массажа и гидротерапии, продемонстрировали ряд достоинств на основе нелинейного анализа. Во-первых, их комплексный характер способствовал значительному повышению хаотичности и сложности динамики в пораженной конечности, как видно из прироста λ и D₂, что отражает усиление нейромышечной адаптации и пластичности, превышающее минимальные клинически значимые изменения (например, ΔD₂ > 0,15). Во-вторых, фокус на минимизации осевой нагрузки (через гидротерапию и ортезы) и контроле боли (TENS и ультразвук) привел к сокращению асимметрии (снижение Δλ и ΔD₂), способствуя межконечностной координации и предотвращению перегрузки компенсаторной стороны, что делает программу подходящей для ранних стадий гонартроза. Помимо этого, персонализация реабилитационного процесса обеспечивалась за счет еженедельного мониторинга по шкалам VAS и WOMAC, на основании которого проводилась коррекция интенсивности нагрузок. Достигнутый терапевтический эффект, подтвержденный объективными биомеханическими показателями, характеризуется переходом от компенсаторной стратегии движения к восстановлению физиологической регуляции моторики.
Несмотря на достигнутую положительную динамику, значение экспоненты Ляпунова (λ) для правой конечности (2,24) осталось ниже показателя здоровой левой конечности (2,28). Кроме того, величина корреляционной размерности (D₂ = 1,75) не достигла общепринятого физиологического порога (~2,0). Совокупность этих данных указывает на неполное восстановление сложной нелинейной динамики двигательного паттерна. Полученные результаты позволяют предположить, что продолжительность и/или интенсивность примененного курса реабилитации могли быть недостаточными для полной нормализации структуры аттрактора локомоции для исследуемого пациента. Минимальная динамика изменения параметров левой конечности (ΔD₂ = + 0,02) может отражать развитие компенсаторных механизмов в ответ на перераспределение нагрузки. Данная тенденция требует внимания в рамках долгосрочного прогноза, поскольку потенциально способна привести к формированию новых патологических паттернов движения при отсутствии последующего реабилитационного сопровождения. Кроме того, недостаточная интеграция разработанной программы реабилитации пациента с современными технологиями, такими как биоуправление, потенциал которых мог бы существенно усилить терапевтический эффект, в текущей конфигурации протокола привело к недостаточной эффективности в коррекции параметров запаздывания (τ), где улучшения носили умеренный и асимметричный характер.
Таким образом, несмотря на преобладание положительных результатов в рамках краткосрочного наблюдения, выявленные ограничения подчеркивают необходимость дальнейшей модификации протокола, направленной на достижение полной межконечностной симметрии и долгосрочной стабилизации восстановленных функций.
Заключение
Настоящее исследование подтверждает диагностическую и прогностическую ценность методов нелинейной динамики для объективной оценки нарушений паттерна ходьбы у пациентов с гонартрозом I–II стадии. Выявленная с помощью показателей нелинейной динамики (Δλ = 0,12; ΔD₂ = 0,35) значимая асимметрия в двигательном контроле отражает формирование компенсаторных механизмов, обусловленных болевым синдромом и проприоцептивным дефицитом, что проявляется в снижении сложности («редукции степеней свободы») паттерна ходьбы на пораженной стороне.
Клиническая значимость результатов подтверждается высокой корреляцией (r > 0,85) нелинейных параметров со шкалами VAS и WOMAC, а также пороговым эффектом (D₂ < 1,6), ассоциированным с ухудшением и риском прогрессирования. Это позиционирует λ и D₂ как биомаркеры, дополняющие рентгенологические критерии (Kellgren – Lawrence), и способствует разработке персонифицированных программ реабилитации, фокусирующихся на восстановлении хаотической динамики движения, как показано в исследованиях по модификации походки. Полученные изменения (Δλ = +0,08; ΔD₂ = +0,22 в пораженной конечности) подтверждают эффективность проведенного курса реабилитации включающего ЛФК, физиотерапию, гидротерапию, хотя полная нормализация требует дальнейшей оптимизации индивидуальных реабилитационных программ.
В целом методология нелинейного анализа паттернов ходьбы на основе кинематических временных рядов представляет инновационный инструмент для персонализированных реабилитационных программ, акцентирующий реконструкцию сложной архитектуры двигательного акта. Перспективные направления дальнейших исследований включают валидацию методики на многоцентровых когортах, разработку нормативных значений показателей λ и D₂ для различных клинических групп, а также интеграцию нелинейного анализа с современными биомеханическими технологиями, включая создание алгоритмов машинного обучения для прогнозирования динамики заболевания. Кроме того, представляет интерес изучение комбинации предложенного подхода с анализом формирующихся паттернов ходьбы, методами биологической обратной связи и современными ортезными системами. Реализация указанных направлений позволит разработать эффективные стратегии профилактики прогрессирования и улучшения качества жизни пациентов с дегенеративными заболеваниями суставов, а также создать методические рекомендации по применению нелинейного анализа в реабилитационной практике.
Conflict of interest
Библиографическая ссылка
Батышева Т.Т., Тихонов С.В., Алексеева М.В. НЕЛИНЕЙНЫЙ АНАЛИЗ ПАТТЕРНОВ ХОДЬБЫ ДЛЯ МОНИТОРИНГА ЭФФЕКТИВНОСТИ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С ГОНАРТРОЗОМ // Современные проблемы науки и образования. 2025. № 6. ;URL: https://science-education.ru/en/article/view?id=34367 (дата обращения: 07.07.2026).
DOI: https://doi.org/10.17513/spno.34367