


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
IMPROVEMENT OF THE ORTHO-SUV ORTHOPEDIC HEXAPOD ARRANGEMENTS USED FOR THE TREATMENT OF PATIENTS WITH KNEE JOINT STIFFNESS (EXPERIMENTAL STUDY)

История использования аппаратов внешней фиксации (АВФ) для восстановления функции коленного сустава насчитывает более 60 лет [1]. За это время было разработано множество различных модификаций аппаратов, отличающихся по конфигурации и типу шарнирного механизма [1-3]. В результате анализа работы различных типов шарнирных АВФ, применяемых для коленного сустава, было выявлено, что только конструкции, работающие на основе виртуального шарнира, могут обеспечить движения в коленном суставе в соответствии с его естественной кинематикой [4; 5]. К данному типу АВФ относятся ортопедические гексаподы [6-8].
Известны попытки разработать оптимальные, для разработки движений в коленном суставе, компоновки ортопедического гексапода [9]. Однако исследование было выполнено на костных муляжах без учета мягких тканей бедра и голени, вследствие чего не мог быть учтен возможный «конфликт» страт с мягкими тканями: их соприкосновение, препятствующее дальнейшему сгибанию голени.
Исходя из вышеизложенного, целью настоящего исследования было разработать оптимальные, с учетом мягких тканей, компоновки ортопедического гексапода «Орто-СУВ», обеспечивающие максимальную амплитуду движений в коленном суставе.
Материал и методы исследования
Эксперимент выполнялся при помощи специального устройства и способа его применения (Патент РФ на изобретение № 2763643). Были использованы модели нижней конечности, содержащие пластиковые бедренную и большеберцовую кости, шарнирно соединенные между собой. Мягкие ткани были смоделированы с использованием поролоновых листов (рис. 1), на которые были нанесены восемь уровней согласно методу унифицированного обозначения чрескостного остеосинтеза (МУОЧО) [10]. Компоновки были исследованы на трех типах моделей нижних конечностей, имитирующих эктоморфный, мезоморфный, эндоморфный соматотипы, определяемые по методу B. Heath, J. Cartner [11-13]. Для моделирования конечностей были проведены замеры длины бедра и голени и их окружности на трех уровнях у 27 пациентов, относящихся к эктоморфному, у 30 пациентов, относящихся к мезоморфному, и у 29 пациентов, относящихся к эндоморфному соматотипу (рис. 1а). Все пациенты являлись представителями мужского пола. Длину сегментов и окружность измеряли по стандартной методике [14]. По результатам замеров (табл. 1) были изготовлены искусственные модели нижних конечностей людей с тремя разными соматотипами (рис. 1б). В соответствии с окружностью бедра и голени были использованы кольцевые опоры соответствующего диаметра (табл. 1).
|
|
|
|
а |
б |

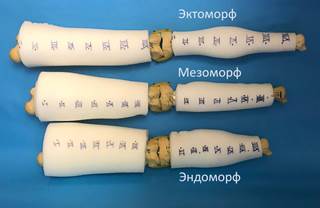
Рис. 1. Моделирование нижних конечностей: а - определение параметров у трех пациентов с разным соматотипом (черным цветом отмечены уровни измерения окружности, красным отмечены границы измерения длин бедер и голеней); б – изготовленные по полученным замерам длины и окружности модели нижних конечностей.
Отмечены уровни согласно МУОЧО
Таблица 1
Параметры нижней конечности у различных соматотипов и диаметр подобранных опор
|
Соматотип |
Длина бедренной кости (см) |
Окружность бедра (см) |
Длина большеберцовой кости (см) |
Окружность голени (см) |
Диаметр опор бедра и голени (мм)
|
|
Эктоморф (n-27) |
49,4±1,71 |
в/3 – 43,2±1,22 с/3 – 36,4±1,25 н/3 – 31,1±1,03 |
44,2±1,13 |
в/3 – 24,3±1,24 с/3 - 28,2±1,20 н/3 -18,1±1,09 |
180/150 |
|
Мезоморф (n-30) |
43,3±1,66 |
в/3 – 48,9±1,15 с/3 – 41,4±1,27 н/3 – 36,4±1,3 |
38,2±1,21 |
в/3 – 28,7±1,38 с/3 – 34,1±1,5 н/3 – 21,4±1,13 |
200/160 |
|
Эндоморф (n-29) |
37,2±1,26 |
в/3 – 52,7±1,35 с/3 – 46,3±1,68 н/3 – 41,4±1,54 |
32,7±1,04 |
в/3 – 36,2±1,31 с/3 – 39,1±1,37 н/3 – 25,6±1,05 |
220/180 |
Примечание: в/3 – верхняя треть; с/3 – средняя треть; н/3 – нижняя треть. Показаны средние значения и среднеквадратичные отклонения.
Эксперимент выполнялся следующим образом. На уровне верхней трети бедра и нижней трети голени монтировали кольцевые опоры соответствующего диаметра (табл. 1), которые стабильно фиксировали чрескостными элементами к искусственным моделям бедренной и большеберцовой костей. Таким образом, формировали два статических модуля: проксимальный (бедренный) (рис. 2а) и дистальный (большеберцовый) (рис. 2б). К статическим опорам посредством трех телескопических шарнирных штанг (рис. 2в) фиксировали мобильные модули, представляющие собой базовую (рис. 2г) и мобильную (рис. 2д) опору, к которым, в свою очередь, фиксировали шесть страт ортопедического гексапода «Орто-СУВ» (рис. 2е). Опосредованная фиксация базовой и перемещаемой опоры при помощи телескопических штанг не требовала их фиксации чрескостными элементами к искусственной модели нижней конечности. Изменение длины телескопических штанг обеспечивало возможность изменения расстояния базовой и перемещаемой опоры от суставной щели. Страты фиксировали в таких позициях, чтобы линии, проведенные от карданов, образовывали равносторонний треугольник, обеспечивая этим максимально возможное перемещение мобильной опоры относительно базовой [15]. В эксперименте использовались страты с длинным (30 см) типоразмером резьбовых стержней.
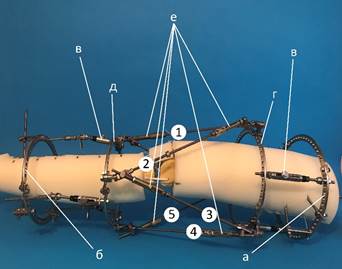
Рис. 2. Способ фиксации базовой и мобильной опоры гексапода «Орто-СУВ» (пояснения в тексте)
Оптимальную компоновку гексапода определяли путем изучения зависимости амплитуды движений в коленном суставе без контакта страт с мягкими тканями от:
1) расстояния базовой и перемещаемой опор от уровня суставной щели коленного сустава (рис. 3а);
2) варианта фиксации страты к опоре: при помощи прямых или Z-образных платиков (рис. 3б);
3) наличия «свободной» секторной опоры (рис. 3в);
4) угла наклона перемещаемой опоры относительно кости в сагиттальной плоскости (рис. 3г);
5) угла наклона базовой и перемещаемой опор относительно кости в сагиттальной плоскости (рис. 3г).
Таким образом, компоновки были исследованы в 5 различных вариантах. Эксперимент начинали с расположения базовой и мобильной опор на расстоянии 100 мм от суставной щели коленного сустава. Последующие серии экспериментов выполнялись после перемещения опор на расстояние 120, 140, 160 мм от суставной щели (рис. 3а).
Скомпоновав аппарат, сгибали-разгибали голень и исследовали максимально обеспечиваемую компоновкой амплитуду движений, в градусах, которую определяли при помощи угломера. Максимально возможной считали амплитуду, при которой возникал контакт страт с моделированными мягкими тканями, либо страты становились параллельными опоре, или заканчивалась длина самой страты. Результаты исследования каждого из 5 вариантов компоновок заносили в таблицу для последующей статистической обработки данных.
Для исследования каждого из 5 вариантов компоновок было изготовлено по 30 экземпляров экто-, мезо-, эндоморфных моделей нижних конечностей. Общее число проведенных экспериментов составило 450. Полученные в результате эксперимента данные статистически обрабатывали с использованием программного пакета Statistica v10. Сравнение изучаемых отклонений проводили по принципу связанных выборок с помощью критерия Фридмана. Достоверным отличием считали общепринятую в медицинских исследованиях вероятность безошибочного прогноза более 95% (p<0,05.) Полученные результаты представлены в виде средних значений со среднеквадратичным отклонением.
|
|
|
|
а |
б |
|
|
|
|
в |
г |
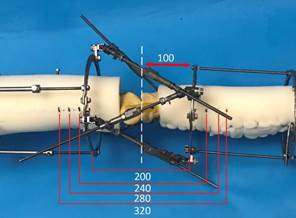

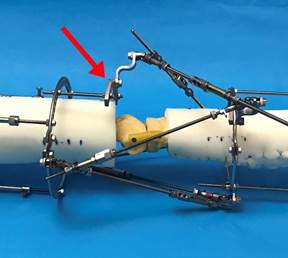
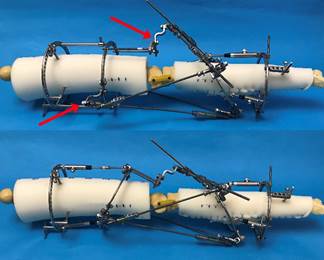
Рис. 3. Различные вариации исследуемых компоновок ортопедического гексапода «Орто-СУВ»: а - стандартная ориентация опор с фиксацией страт при помощи прямых платиков (1 вариант); б – при помощи Z-образных платиков в точках фиксации страт №№ 1, 2, 6 (второй вариант); в – с добавлением свободной секторной опоры и Z-образных платиков в точках фиксации страт № 1, 2, 6 (третий вариант); г – с добавлением наклона мобильной опоры и фиксацией при помощи Z-образных платиков в точках фиксации страт №№ 1, 2, 3, 5, 6 (четвертый вариант) или с наклоном базовой и мобильной опоры и фиксацией при помощи Z-образных платиков в точках фиксации страт №№ 1, 2, 6 (пятый вариант). Z-образные платики и свободный сектор отмечены красными стрелками
Результаты исследования и их обсуждение
В эксперименте на эктоморфной модели конечности наибольшая амплитуда движений была достигнута при пятом варианте компоновки (с добавлением свободного сектора, наклона базовой и мобильной опор и Z-образных платиков в точках крепления №№ 1, 2, 6 страт) и расположении опор на расстоянии 160 мм от коленного сустава (табл. 2, рис. 4а).
Таблица 2
Результаты определения максимально возможной амплитуды движений для эктоморфной модели конечности
|
Вариант компоновки гексапода |
Расстояние от опоры до щели коленного сустава (мм) |
|||
|
100 |
120 |
140 |
160 |
|
|
Первый |
53,6±0,9 |
49±0,92 |
38±0,9 |
33±1,0 |
|
Второй |
72,8±1,0 |
66,3±0,8 |
61,5±0,7 |
54,6±0,9 |
|
Третий |
65,4±0,9 |
77,9±0,7 |
83,2±1,1 |
90,2±0,9 |
|
Четвертый |
89,1±1,1 |
99,4±1,1 |
108,7±0,7 |
113±1,0 |
|
Пятый |
96±0,7 |
104,4±0,8 |
116,5±0,8 |
122,4±1,0 |
Примечание: первый (стандартная ориентация опор + прямые платики); второй (стандартная ориентация опор + Z-образные платики в точках фиксации страт № 1, 2, 6); третий (стандартная ориентация опор + Z-образные платики в точках фиксации страт №№ 1, 2, 6 + свободный сектор); четвертый (стандартная ориентация базовой + наклон мобильной опоры + Z-образные платики в точках фиксации №№ 1, 2, 3, 5, 6 страт + свободный сектор); пятый (наклон базовой и мобильной опор + Z-образные платики в точках фиксации №№ 1, 2, 6 страт + свободный сектор).
В эксперименте на мезоморфной модели конечности наибольшие показатели амплитуды движений также были зарегистрированы при пятом варианте компоновки и расположении базовой и мобильной опоры на расстоянии 160 мм от суставной щели (табл. 3, рис. 4б).
Таблица 3
Результаты определения максимально возможной амплитуды движений для мезоморфной модели конечности
|
Вариант компоновки гексапода |
Расстояние от опоры до щели коленного сустава (мм) |
|||
|
100 |
120 |
140 |
160 |
|
|
Первый |
53,4±0,7 |
60±0,6 |
45,9±0,6 |
40,3±0,7 |
|
Второй |
48,2±0,9 |
60,1±0,8 |
68,8±0,8 |
63±0,6 |
|
Третий |
50,9±1,1 |
63,8±1,0 |
81,5±0,7 |
90,2±0,8 |
|
Четвертый |
91,6±1,0 |
98,3±0,9 |
105±0,5 |
112,1±1,2 |
|
Пятый |
98,6±0,6 |
110,2±1,1 |
117,9±0,7 |
128,3±0,9 |
Примечание: в ячейках, выделенных синим цветом, дальнейшему сгибанию препятствовало соприкосновение страт с мягкими тканями.
Аналогично и для эндоморфной модели нижней конечности наибольшая амплитуда была достигнута при пятом варианте компоновки и расположении опор на расстоянии 160 мм от сустава (табл. 4, рис. 4в).
Таблица 4
Результаты определения максимально возможной амплитуды движений для эндоморфной модели конечности
|
Вариант компоновки гексапода |
Расстояние от опоры до щели коленного сустава (мм) |
|||
|
100 |
120 |
140 |
160 |
|
|
Первый |
60,1±0,5 |
65,3±1,06 |
54,7±1,01 |
49,5±1,0 |
|
Второй |
64,6±0,9 |
69,3±0,7 |
79±0,76 |
73±0,74 |
|
Третий |
64,8±0,9 |
71,6±1,0 |
80,7±1,3 |
90,5±1,15 |
|
Четвертый |
87,1±0,8 |
90,8±0,7 |
97,8±1,17 |
107,9±0,9 |
|
Пятый |
91,1±1,17 |
101,6±1,3 |
111,2±1,1 |
121,3±1,2 |
Примечание: в ячейках, выделенных синим цветом, дальнейшему сгибанию препятствовало соприкосновение страт с мягкими тканями.
Таким образом, независимо от соматотипа, наилучшие показатели были выявлены при пятом варианте компоновки (p≤0,05), включающей свободный сектор, наклоны базовой и мобильной опор, расположенных на расстоянии 160 мм от суставной щели, и фиксацию при помощи Z-образных платиков в точках прикрепления страт №№ 1, 2, 6 (рис. 4 а-в).
|
|
|
|
|
а |
б |
в |



Рис. 4. Усовершенствованные компоновки ортопедического гексапода: а - для эктоморфной модели; б – для мезоморфной модели; в - для эндоморфной модели
Как видно из таблиц 2-4, независимо от типа конституциональной изменчивости в подавляющем большинстве вариаций компоновок (за исключением первого), при перемещении опор от 100 до 160 мм отмечается увеличение амплитуды движений (p≤0,05). Соприкосновение страт с моделированными мягкими тканями (рис. 5) происходило только при первом и втором вариантах компоновок (табл. 2-4). Конфликт возникал либо со стратой № 1, либо со стратой № 2 (рис. 5). В остальных случаях максимальная амплитуда регистрировалась после того, как страты № 4 и № 5 становились параллельными базовой опоре, т.к. механика работы ортопедических гексаподов под отрицательным углом страт не позволяет дальнейшее перемещение мобильной опоры.

Рис. 5. Контакт страты № 2 с моделированными мягкими тканями
Необходимо отметить, что представленные 5 вариантов компоновок являлись своего рода этапами решения поставленной цели. Как видно из таблиц 2-4, при стандартной ориентации опор и фиксации прямыми платиками компоновка обеспечивала наименьшую амплитуду движений в основном из-за конфликта страт с мягкими тканями. Для увеличения расстояния между стратами № 1, № 2 и моделированными мягкими тканями прямые платики были заменены на Z-образные, что позволило достичь большей амплитуды движений. Однако при расположении опор на расстоянии 140 и 160 мм дальнейшее сгибание было вновь ограничено соприкосновением страт с мягкими тканями. Для еще большего увеличения расстояния между стратами № 1, 2 и мягкими тканями к базовой опоре была дополнительно смонтирована свободная секторная опора. Во всех случаях, независимо от расстояния базовой опоры, свободную секторную опору устанавливали в проекции мыщелков бедренной кости (на VIII уровне по МУОЧО) (рис. 6). Это позволило избежать конфликта страт с мягкими тканями, но дальнейшее сгибание было ограничено тем, что страты № 4, № 5 становились параллельными базовой опоре.
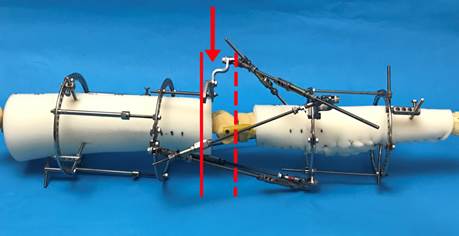
Рис. 6. Установка сектора в проекции мыщелков бедренной кости (на VIII уровне по МУОЧО)
Для решения указанной проблемы добавляли наклон мобильной опоры и заменяли на базовой опоре прямые платики на Z-образные в точках фиксации страт № 3 и № 5 (рис. 7а). Однако одной замены прямых платиков на базовой опоре оказалось недостаточным для достижения сгибания 120° (рис. 7б). Поэтому в следующем варианте был добавлен угол наклона базовой опоры (рис. 7в). При этом Z-образные платики в точках фиксации № 4 и № 5 страт были вновь заменены на прямые, т.к. при попытке фиксировать страты к Z-образным платикам резьбовой стержень выходил из узла изменения длины страт. При наклоне базовой опоры с прямыми платиками достигался больший угол сгибания, чем при стандартной ориентации базовой опоры и Z-образным типом фиксации страт (рис. 7г). Этот прием (замена Z-образных платиков на прямые) дополнительно несколько уменьшал громоздкость конструкции.
|
|
|
|
а |
б |
|
|
|
|
в |
г |
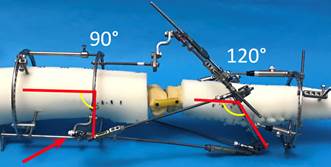
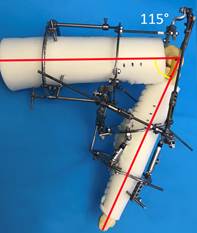
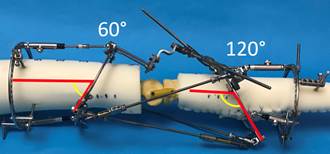
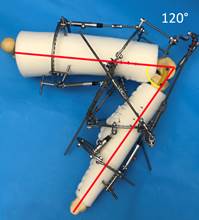
Рис. 7. Разные варианты ориентации базовой опоры и методов фиксации страт:
а - стандартная ориентация базовой опоры и фиксация страт при помощи Z-образных платиков (4 вариант); б – максимальный угол сгибания 115º; в - наклон базовой опоры и фиксация страт при помощи прямых платиков (5 вариант); г - максимальный угол сгибания 120º
Ограничением исследования явилось то, что измерения длины и окружности бедра и голени для моделирования нижних конечностей людей, относящихся к разным соматотипам, были проведены только у лиц мужского пола. Можно было бы предположить, что подобранные по замерам окружности бедра и голени кольцевые опоры для лиц женского пола будут отличаться по диаметру от тех, что соответствуют мужскому полу. Однако, как видно из таблиц 2-4, обеспечиваемая амплитуда движений зависит от варианта компоновки и расстояния, на котором установлены базовая и мобильная опоры, а не от соматотипа или диаметра подобранных опор.
Разработанные «оптимальные» компоновки прежде всего предназначены для восстановления функции коленного сустава при его разгибательных контрактурах, когда необходимо обеспечить максимальную амплитуду движений. При сгибательных контрактурах, когда, как правило, необходимо только разогнуть сустав, могут быть использованы компоновки, обеспечивающие меньшую амплитуду. Также возможен вариант, когда пациенту достаточно определенной, например 90°, амплитуды движений и, в соответствии с функциональным потребностями, могут быть подобраны соответствующие компоновки аппарата. Данный способ исследования может быть использован для определения оптимальных компоновок ортопедического гексапода и для других суставов, например локтевого.
Выводы
Для обеспечения наибольшей амплитуды движений в коленном суставе аппарат внешней фиксации должен удовлетворять следующим требованиям:
1. Базовая и мобильная опоры расположены на расстоянии 160 мм от щели коленного сустава.
2. Имеются наклоны базовой опоры 60°, мобильной опоры 120° (углы открыты проксимально).
3. Страта № 1 фиксирована к «свободному» сектору, расположенному в проекции мыщелков бедренной кости (на VIII по МУОЧО).
Библиографическая ссылка
Рохоев С.А., Соломин Л.Н., Старчик Д.А., Демин А.С. УСОВЕРШЕНСТВОВАНИЕ КОМПОНОВОК ОРТОПЕДИЧЕСКОГО ГЕКСАПОДА ОРТО-СУВ, ИСПОЛЬЗУЕМЫХ ДЛЯ ЛЕЧЕНИЯ ПАЦИЕНТОВ C КОНТРАКТУРАМИ КОЛЕННОГО СУСТАВА (ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ) // Современные проблемы науки и образования. 2022. № 2. ;URL: https://science-education.ru/en/article/view?id=31521 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/spno.31521