


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
BY THE ISSUE OF INCREASING THROUGHPUT OF THE CHANNEL DIRECT TELEMETRY SCADA-SYSTEMS

Специфика управления и контроля распределенных энергообъектов и производств связана со все возрастающей сложностью реализующих ее систем сбора, передачи, обработки, отображения информации и формирования управляющих сигналов, выполняющих функции SCADA–систем (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) [4; 6].
SCADA-системы для распределенных энергообъектов и производств впервые стали использоваться в электроэнергетике для решения задач достоверной передачи информации и команд управления по каналам связи от удаленных контролируемых пунктов (КП) на центральный пункт управления, реализуемый в виде центральной приемо-передающей станции (ЦППС). Уже на первых этапах развития SCADA-системы одной из главных задач было обеспечение высокой достоверности передаваемой информации и команд управления [6].
Кроме того, расширение круга выполняемых функций за счет передачи метрологической информации, данных об аварийных процессах и диагностической информации сделало первоочередной задачу обеспечения максимального использования пропускной способности каналов связи и аппаратуры SCADA-системы. В данной статье рассматривается проблема эффективного использования каналов текущих измерений (ТИ) электрических параметров контролируемых энергообъектов.
В большинстве современных SCADA канал ТИ воспринимает информацию не непосредственно от первичных датчиков измеряемых параметров, а от промежуточных преобразователей, нормализующих сигналы с датчиков до стандартных значений, определяемых ГОСТом [7; 8]. Естественно, что при использовании промежуточных преобразователей часть «интеллекта» канала ТИ выносится за пределы SCADA , а обработка и форматирование информационных сообщений производится по данным, полученным от промежуточных преобразователей.
Устройства, реагирующие на мгновенные значения контролируемых сигналов, устанавливаются в специализированные информационные комплексы - регистраторы аварийной информации (РАИ). При этом необходимо обеспечить сохранение динамических составляющих текущих значений сигналов, поэтому в РАИ принципиально невозможно использование промежуточных преобразователей сигналов с датчиков в сигналы постоянного тока.
В результате существенно разнящихся подходов к организации каналов телеизмерений для различного класса систем на одном контролируемом энергообъекте зачастую используются несколько типов устройств от разных изготовителей и, естественно, требующих специфического обслуживания. Как следствие, большие информационные массивы, накопленные РАИ в короткие промежутки времени возникновения нештатных ситуаций, остаются в месте сбора и не могут быть использованы для оперативного поставарийного анализа [1].
Очевидно, что в современных системах SCADA, ориентированных на измерения параметров электрических сетей распределенных энергообъектов, существует необходимость реализации канала прямых измерений, т.е. ухода от использования вторичных преобразователей [2; 3].
В качестве входных должны использоваться сигналы переменного тока (Iвх) и напряжения (Uвх) от измерительных трансформаторов:
Iвх=Im![]() (wt ± φ) , (1)
(wt ± φ) , (1)
Uвх = Um ![]() wt, (2)
wt, (2)
где Um , Im , w и φ - амплитудные значения напряжения и тока; круговая частота и фазовый сдвиг между напряжением и током, соответственно.
Переход к сигналам переменного тока не только исключает необходимость использования буферных преобразователей, которые увеличивают стоимость оборудования, уменьшают надежность, увеличивают погрешность измерений, но и позволяет более оперативно, объективно и эффективно фиксировать аварийные события [1-3]. Положительные свойства «прямых» измерений достигаются благодаря отсутствию в измерительной цепи инерционных преобразователей сигналов переменного тока в постоянный, которые подавляют гармонические составляющие измеряемого сигнала с частотами выше fгр_ТИТ =5÷10 Гц. Учитывая известное положение теоремы Котельникова, функцию x(f) с граничной частотой спектра fТИ можно восстановить по значениям дискретных ординат с интервалом дискретизации ТТИ =1/(2 fТИ).
Приведем основные условия для реализации «прямых» измерений в многофункциональных системах SCADA: высокое быстродействие для получения за один период напряжения питающей сети нескольких сотен отсчетов измеряемых параметров при работе в режиме регистрации аварийных событий или нескольких десятков отсчетов - для вычисления среднеквадратичного значения тока и напряжения по мгновенным значениям; сокращение избыточности данных при передаче сообщений; снижение основной приведенной погрешности до ± (0,1÷0,5)%.
Использование прямых измерений параметров электрических сетей позволит: существенно уменьшить суммарную стоимость измерительного канала; освободить площадь, занимаемую преобразователями на энергообъектах; упростить и удешевить метрологическую поддержку измерительных каналов; повысить надежность измерительного тракта; повысить достоверность информации, так как для общих блоков можно использовать более мощные диагностические операции без заметного ущерба для других параметров [2; 4].
Авторами предлагается новый способ реализации канала прямых измерений, в котором обеспечивается снижение избыточности при передаче аварийной информации за счет исключения из информационного сообщения отсчётов сигналов от датчиков, от которых не получен аварийный сигнал. В передаваемом сообщении содержатся данные, позволяющие определить временные сдвиги между «выбегами» сигналов для разных датчиков [4].
Проанализируем интенсивность информационного потока канала ТИ при использовании «прямых» измерений параметров электрических сетей распределенных энергообъектов. При анализе будем учитывать следующие параметры одного трехфазного присоединения - U, I, P, Q - сигналы, характеризующие, соответственно, измеряемые за один период частоты питающей сети значения напряжения, тока, активной и реактивной мощности. Рабочий цикл канала ТИ ограничивается допустимым временем задержки ввода сигналов тока и напряжения U, I в обрабатывающий центр (ОЦ), равным Tзад_U,I. Исходя из этого, определим предельное число трехфазных присоединений (Мприс), информация от которых может быть воспринята каналом ТИ без возникновения очередей на обработку информации в ОЦ [3]:
Мприс = Tзад_U,I fc , (3)
где fc - частота питающей сети. При Tзад_U,I = 1с и fc = 50 Гц получим Мприс = 50. Принимая во внимание, что в контуре типового энергообъекта обычно значится 128 каналов ТИ, полученное число Мприс эквивалентно значительно большему числу каналов, поскольку включает по 50 каналов измерения тока, напряжения, активной и реактивной мощности. Авторами получено выражение для расчета средней загрузки ОЦ потоком канала ТИ (hмод_ст_ТИТ) :
hмод_ст_ТИТ = Tт[m1m2_i+0.5pобр(m3+m4+m5+0.5mj)+m6], (4)
Tт[m1m2_i+0.5pобр(m3+m4+m5+0.5mj)+m6], (4)
где Tт - длительность одного рабочего такта ОЦ; m1 - среднее число тактов, затрачиваемых на реализацию одной команды процедуры ввода и обработки информации; m2i - среднее число команд, затрачиваемых ОЦ для обработки информации i-го вида, содержащейся в одной «сгруппированной» посылке, введенной в ОЦ, m3 ; m4 ; m5 ; m6 - среднее число тактов, затрачиваемых на выполнение команд приостановки, подготовки, анализа и ввода информационного сообщения, соответственно; mj - число команд программы обработки информации j-го вида; pобр - вероятность того, что ОЦ занят обработкой какой-либо задачи в любом временном сечении; k2 - число разрядов представления информации в канале ТИ; k3 - число параметров тока и напряжения, вводимых в ОЦ; Tопр_ОЦ - принятое время периода между вводами информации в ОЦ.
При подстановке в (5) k2=16, Tопр_ОЦ= 1с, k3=6 (три фазных тока и три фазных напряжения); m2_i=103ξ1 +102(1-ξ1), где ξ1 - доля данных ТИ в общем информационном потоке, получим с учетом ранее принятых значений:
hТИ = 0.54ξ1 + 0.24 . (5)
Из (5) видно, что загрузка ОЦ становится неприемлемо большой, если ξ1 >0.15, т.е. если доля данных ТИ составляет более 15% суммарного информационного потока, вводимого в ОЦ. Следовательно, для реализации многофункциональной SCADA, включающей модифицированный канал ввода ТИ, ориентированный на «прямые измерения» параметров электрической сети, необходимо принять дополнительные меры для снижения средней загруженности ОЦ. Авторами был предложен алгоритм ввода информации ТИ в ОЦ, реализация которого позволяет уменьшить его загрузку указанным потоком. Суть разработанного алгоритма состоит в следующем [5]:
- возникающий запрос - требование канала ТИ, распространяется на весь массив данных, который необходимо ввести в ОЦ;
- запрос воспринимается ОЦ при отсутствии запрета на прерывание, когда ОЦ не обслуживает программную секцию ранее поступившего требования, для которой предусмотрена процедура запрета прерывания;
- для поступившего запроса обязательно выполняются процедуры определения вида запроса и его приоритета;
- ОЦ возвращается к обслуживанию прерванного запроса или переходит к обслуживанию нового в зависимости от уровней их приоритетов;
- ОЦ, начавший ввод информации по запросу от канала ТИ, не прекращает его до появления прерывания или автоматически возвращаются к вводу оставшейся части информации по ранее принятому запросу от канала ТИ, если ввод информации был прерван;
- обработка информации производится после завершения ввода всего массива данных;
- при генерации рабочей версии программы работы ОЦ задается число циклов для ввода всего объема данных по одному запросу от канала ТИ.
Блок-схема разработанного алгоритма представлена на риcунке 1. В соответствии с алгоритмом время обработки ОЦ поступившего потока состоит из трех временных компонентов: ввода сигнала прерывания; ввода информационного массива; обработки введенного массива данных. Определим с учетом разработанного алгоритма среднюю относительную загрузку ОЦ потоком канала ТИ -hТИ1.
ηТИ=![]() [0.5pобр(m3+m4+m5+0.5mj)+
[0.5pобр(m3+m4+m5+0.5mj)+![]() Mприсk2k3 m6+
Mприсk2k3 m6+
+ ![]() Mприсk2k3 m2_i )]=
Mприсk2k3 m2_i )]=![]() [0.5pобр(m3+m4+m5+0.5mj)+Mприсk2k3(m6 +m1m2_i)]. (6)
[0.5pобр(m3+m4+m5+0.5mj)+Mприсk2k3(m6 +m1m2_i)]. (6)
Подставляя числовые значение в (6), получаем: hТИ1=0.54ξ1+0.12.
Сопоставляя выражения (6) и (5), получим коэффициент снижения загрузки ОЦ потоком ТИ при использовании разработанного алгоритма ввода информации в ОЦ (kсн_инт).
k сн_инт =ηТИ /ηТИ1 =(0.54ξ1+0.24)/(0.54ξ1+0.12). (7)
Среднестатистическая для данного типа сигналов величина ξ1=0.15, тогда, подставляя ξ1=0.15 в полученные ранее выражения, получаем kсн_инт ≈1.51 и ηТИ1 ≈0.2. Следовательно, благодаря разработанным принципам ввода информации в ОЦ, его загрузка потоком ТИ снижается почти в 1.5 раза.
Оценим интенсивность потока канала ТИ. Будем считать, что информация, соответствующая действующим значениям тока и напряжения, передается в ОЦ только при отклонении текущих значений по сравнению с переданными ранее на величину, большую установленного предела. Такой спорадический подход к передаче вполне допустим, так как основная информация ТИ - значения активной и реактивной мощности, также определяются на КП, а не рассчитываются в ОЦ по полученным значениям I, U и cosj. Рассчитанные данные значений P и Q необходимо передавать периодически при времени цикла, как правило, не более 3 мин (среднестатистическое значение), что обеспечивает возможность фиксации в ОЦ пиковых значений мощности. Периодические контрольные передачи данных значений U и I теряют смысл, т.к. работоспособность модифицированного канала ТИ определяется по периодически передаваемым значениям P и Q. С учетом сказанного, среднюю интенсивность передачи ТИ по каналам связи можно представить выражением:
λмод_ТИТ =  +
+ , (8)
, (8)
где Nпос_ТИТ (байт) - длина сообщения, содержащего данные одного измеряемого параметра; Nпос_КС (байт) - максимальная длина сообщения; pпер_ТИТ - вероятность передачи сообщения; Tопр_U,I – время одного цикла опроса параметров U, I по всем трехфазным присоединениям (коэффициент 2 учитывает, что контролируется по два параметра – P и Q, для каждого присоединения); Tпер_P,Q – время одного цикла передачи значений активной и реактивной мощности.
При Мприс = 50 ; Nпос_ТИ = 3 байт; Nпос_КС = 30 байт ; pпер_ТИ =10-2; Tопр_U,I = 1с; Tпер_P,Q = 180 с получаем λмод_ТИ ≈ 0.15 с-1. Опуская промежуточные расчеты, определяем вероятность отсутствия очереди при обработке модифицированного потока ТИ PТИ ≈0.95 и среднее время ожидания обработки одного сообщения ТИ- TТИ ≈0.29 с.
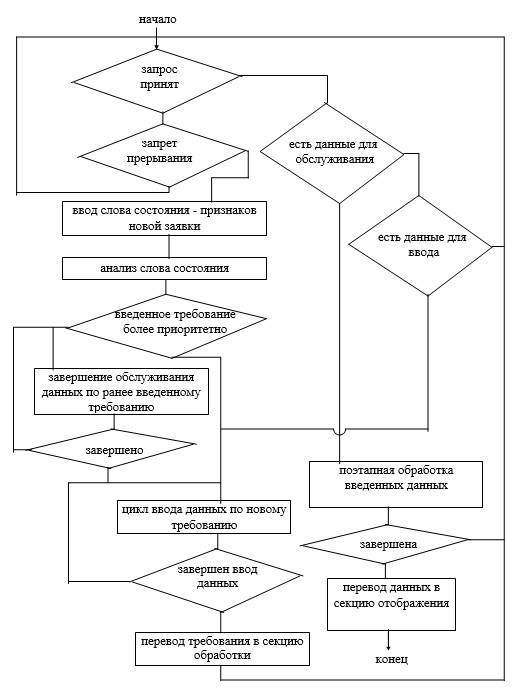
Блок-схема алгоритма работы ОЦ с каналом ТИ.
Рецензенты:
Лисов О.И., д.т.н., профессор кафедры «Информатика и программное обеспечение вычислительных систем» Национального исследовательского университета «МИЭТ», г. Москва;
Гагарина Л.Г., д.т.н., профессор, зав. кафедрой «Информатика и программное обеспечение вычислительных систем» Национального исследовательского университета «МИЭТ», г. Москва.
Библиографическая ссылка
Баин А.М., Каунг С..., Портнов Е.М., Слюсарь В.В., Чжо З.Л. “К ВОПРОСУ ПОВЫШЕНИЯ ПРОПУСКНОЙ СПОСОБНОСТИ КАНАЛА ПРЯМЫХ ТЕЛЕИЗМЕРЕНИЙ SCADA-СИСТЕМ” // Современные проблемы науки и образования. 2015. № 2-1. ;URL: https://science-education.ru/en/article/view?id=21248 (дата обращения: 29.07.2026).