


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
PARAMETRIC IDENTIFICATION OF HUMAN-MACHINE SYSTEM WITH RANDOM EFFECTS AND INTERFERENCES

Ограничимся случаем, когда оператор описывается инерционным звеном второго порядка с запаздыванием [1…5]. Предполагается справедливость гипотезы о формировании оператором управляющих воздействий по фазовым координатам, их скоростям и ускорениям. Тогда уравнения динамики будут иметь вид:
![]()
![]() .
.
При идентификации возмущений и помех возникают значительные сложности, вызываемые, прежде всего, тремя факторами:
- отсутствие удовлетворительного математического описания результатов интегрального воздействия на объект (например, на самолет – атмосферных возмущений);
- практически непредсказуемые случайные воздействия (помехи со стороны оператора);
- коррелированность возмущений и помех с входными воздействиями.
Структурную схему эргатической системы примем в виде, приведенном на рис.1.
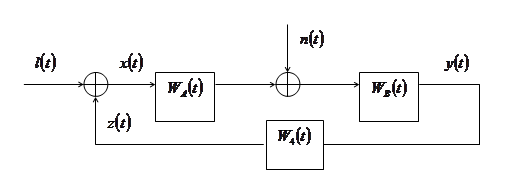
Рис.1. Структурная схема эргатической системы
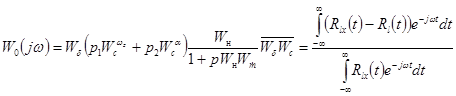
Можно показать, при известных характеристиках человека-оператора и некоррелированности помех с входным воздействием спектральные характеристики помех определяются в виде
(![]() – импульсная переходная функция части объекта регулирования, где действием помех можно пренебречь;
– импульсная переходная функция части объекта регулирования, где действием помех можно пренебречь; ![]() – импульсная переходная функция объекта по отношению к помехе;
– импульсная переходная функция объекта по отношению к помехе;![]() – импульсная переходная функция оператора).
– импульсная переходная функция оператора).
Справедливо
![]() .
.
При указанной структурной схеме эргатической системы передаточную функцию объекта принципиально можно определить в виде (справедлива как при наличии, так и при отсутствии внутренних помех):
![]() .
.
Передаточные функции ![]() ,
, ![]() определяются в соответствии с последовательностью формул:
определяются в соответствии с последовательностью формул:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Здесь ![]() – соответственно корреляционные функции и спектральные плотности.
– соответственно корреляционные функции и спектральные плотности.
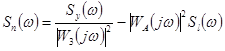
Что касается оператора, при одноканальном управлении его деятельность может описываться по структурной схеме, приводимой на рис.2; ![]() – передаточные функции анализатора и моторики человека-оператора. Сумматор описывает формирование сигнала ошибки
– передаточные функции анализатора и моторики человека-оператора. Сумматор описывает формирование сигнала ошибки ![]() центральной нервной системы.
центральной нервной системы.
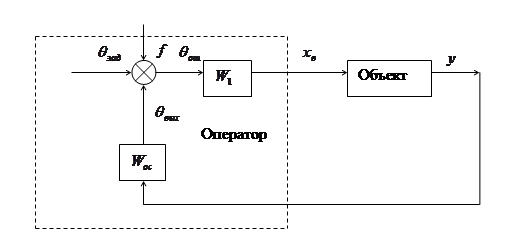
Рис. 2. Структурная схема при одноканальном управлении
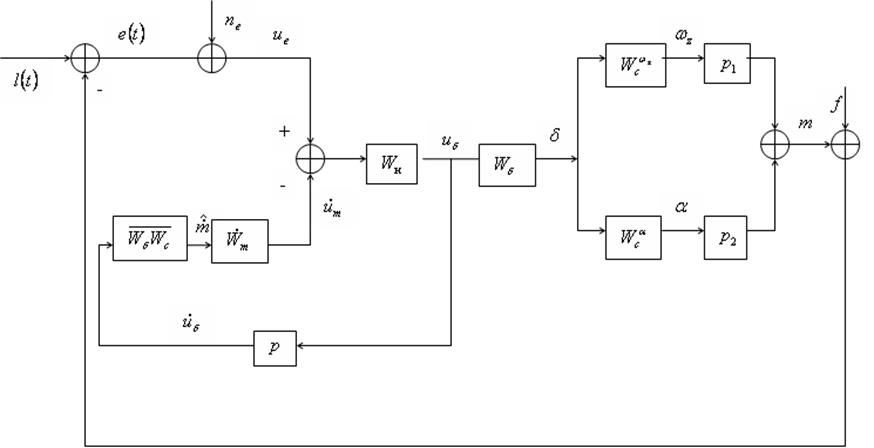
Рис. 3. Модифицированная структурная схема
Как видим, при сравнении функционирования систем «оператор-объект» и «оператор-модель объекта», по существу, нельзя установить степень влияния на полученную разницу от несовпадения модели от реального объекта и параметров оператора (в соответствии с организмическим принципом параметры оператора определяются объектом).
Более подробно описание функционирования эргатической системы возможно по модифицированной структурной схеме Гесса (рис.3); ![]() – передаточные функции объекта (
– передаточные функции объекта (![]() );
); ![]() – коэффициенты усиления оператора (характеризуют
– коэффициенты усиления оператора (характеризуют ![]() );
); ![]() определяет ремнанту, вводимую в ошибку;
определяет ремнанту, вводимую в ошибку; ![]() – возмущение;
– возмущение; ![]() – отклонение руля;
– отклонение руля; ![]() – отклонение ручки управления.
– отклонение ручки управления.
Справедливо
![]() .
.
Можно показать,
 .
.
Программное движение задается ![]() , ошибка –
, ошибка – ![]() , входная координата –
, входная координата – ![]() . Определение неизвестных параметров объекта и человека-оператора можно осуществить по
. Определение неизвестных параметров объекта и человека-оператора можно осуществить по ![]() .
.
Приведенные алгоритмы определения параметров эргатической системы прошли практическую апробацию с положительным результатом при итерационном синтезе тренажеров транспортных систем различного назначения [6-9].
Рецензенты:
Родионов Ю.В., д.т.н., профессор, заведующий кафедрой «Эксплуатация автомобильного транспорта», директор автомобильно-дорожного института ПГУАС, г. Пенза;
Кошев А.Н., д.х.н., профессор, профессор кафедры «Информационно-вычислительные системы» Пензенского государственного университета архитектуры и строительства, г. Пенза.
Библиографическая ссылка
Будылина Е.А., Гарькина И.А., Данилов А.М., Тюкалов Д.Е. ПАРАМЕТРИЧЕСКАЯ ИДЕНТИФИКАЦИЯ ЭРГАТИЧЕСКОЙ СИСТЕМЫ С ПОМЕХАМИ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/en/article/view?id=17681 (дата обращения: 18.07.2026).