


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
AUTOMATED CALCULATION PROCEDURE FOR CATAMARAN PLATFORM OF FLOATING PRODUCTION UNIT

Для изготовления понтонов при выполнении водно-технических и строительных работ на реках и акваториях могут быть использованы внутренние гибкие надувные оболочки [2]. При использовании внутренних гибких оболочек, заполняемых воздухом, размещаемых внутри корпуса, понтоны можно выполнять из легких сборных элементов, не требующих больших объемов сварочных работ при сборке и имеющих удобные для перевозки размеры. Для крупных понтонов не требуется изготовления прочных шпангоутов и рангоутов, так как боковые нагрузки на стенки корпуса будут небольшими. Для таких конструкций отпадает также важное требование: водонепроницаемость корпуса. Остойчивость понтонов при перевозке больших грузов и тяжелых механизмов достигается использованием схемы катамарана. Надежность внутренней гибкой оболочки, работающей под небольшим давлением, равным давлению столба воды, соответствующего осадке понтона, обеспечивается ее полной защищенностью от внешних воздействий. Осадка понтона может регулироваться путем регулирования давления во внутренней гибкой оболочке.
При выполнении гидромеханизированных работ с использованием крупных землесосных снарядов на территориях, расположенных далеко от водных путей, корпуса указанных земснарядов приходится выполнять в виде сборных секций, которые необходимо доставлять на место выполнения работ специальным наземным транспортом. На монтаж и демонтаж корпусов земснарядов приходится затрачивать много времени. При использовании внутренних гибких оболочек, корпуса земснарядов можно выполнять разборными.
Композиционные материалы получили широкое применение в производстве труб и трубопроводов. В настоящее время из полимерных композиционных материалов в мире производится более 200 тыс. тонн труб в год [3]. В отличие от традиционных материалов, композиты обладают более широким спектром физико-механических свойств, для них характерна ярко выраженная анизотропия. Эти особенности, свойственные современным композиционным материалам, предоставляют конструктору дополнительные возможности, позволяют целенаправленно формировать многообразные структуры и, тем самым, создавать материал с желаемыми свойствами. Композиционные материалы сочетают в себе высокую прочность с высокой вязкостью, или трещиностойкостью.
В работе предложена конструкция катамаранного основания технологического судна с изменяемой геометрией (рис. 1). Понтоны плавучего основания предлагается изготавливать из полимерных композиционных материалов. Работа направлена на внедрение автоматизированных методов расчета катамаранных оснований и их оболочек технологических судов различного назначения.
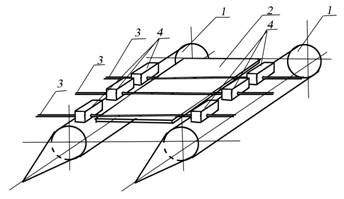
Рис. 1. Конструкция гидравлического пантографа системы связей между понтонами судна:
1 – понтоны; 2 – платформа; 3 – направляющие балки; 4 – механизм раздвижения понтонов
Катамаранный корпус технологического судна с изменяемой геометрией в транспортном положении должно иметь меньшее расстояние между понтонами по сравнению с его технологическим состоянием. Такие противоречивые требования можно удовлетворить, меняя расстояние между понтонами, например, с помощью механизма с направляющими балками [1]. Для изменения расположения понтонов 1, установленные на несущей платформе 2 балки 3 с помощью зубчато-реечного механизма раздвижения понтонов 4, приводятся в движение в необходимом направлении.
Автоматизированный расчет параметров тонкостенной оболочки корпуса технологического судна с изменяемой геометрией на основе гибких композитных материалов
В среде MathCAD произведем расчет оболочки корпуса технологического судна на основе гибких композитных материалов, состоящей из трех частей: конической, цилиндрической и сферической (рис. 2) [4].
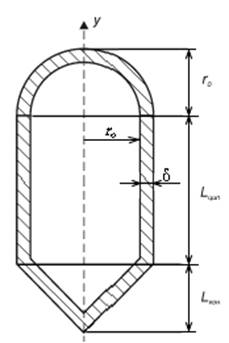
Рис. 2. Схема конструкции оболочки понтона катамаранного корпуса судна
При заданных габаритных размерах и внутреннем давлении найдем толщину стенки.
Размерности:
![]()
![]()
![]()
![]()
![]()
![]()
Исходные данные:
![]()
![]()
![]()
![]()
![]()
![]()
Заданное давление в оболочке ![]()
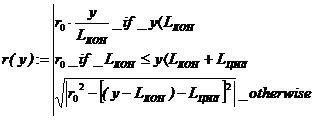
Расчетный блок:

![]()
Нормальные напряжения в оболочке понтона судна:
– напряжения в тангенциальном направлении
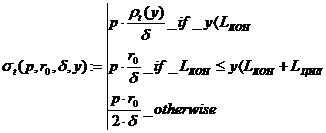
– напряжения в меридиональном направлении
Длина корпуса судна
![]()
![]()
![]()
Эквивалентное напряжение по третьей гипотезе прочности
![]()
Эквивалентное напряжение по четвертой гипотезе прочности
![]()
Рис. 3. Распределения напряжений в тонкостенной оболочке по ее длине
![]()
![]()
Допускаемая толщина оболочки при заданном давлении ![]()
![]()
![]()
Допускаемое давление при заданной толщине оболочки
![]()
Результаты расчета параметров оболочки представлены в таблице 1 и рисунке 4.
Таблица 1
Результаты расчета параметров оболочки
|
Параметр |
Значение |
|||||||||
|
|
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
50 |
|
|
0,15 |
0,3 |
0,45 |
0,6 |
0,75 |
0,9 |
1,05 |
1,2 |
1,35 |
1,5 |
|
|
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
4,5 |
5 |
|
|
0,25 |
0,5 |
0,75 |
1 |
1,25 |
1,5 |
1,75 |
2 |
2,25 |
2,5 |
Рис. 4. Зависимость предельно допустимой толщины оболочки от внутреннего давления
Определим радиальное перемещение точек оболочки:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() – переход к цилиндрическим координатам
– переход к цилиндрическим координатам
Поверхность цилиндрической оболочки после деформации
Поверхность цилиндрической оболочки до деформации
![]()
Таблица 2
Результаты расчета радиального перемещения точек оболочки
|
Параметр |
Значение параметра |
||||||||||
|
|
0 |
95 |
190 |
285 |
380 |
475 |
570 |
665 |
760 |
855 |
950 |
|
|
0 |
0,221 |
0,085 |
0,085 |
0,085 |
0,085 |
0,085 |
0,085 |
0,085 |
0,085 |
0,035 |
Площадь распорного кольца для разгрузки оболочки от изгибающего момента, в месте перехода от конической к цилиндрической части оболочки, см2
![]()
![]()
![]()
![]()
Автоматизированный расчет геометрических характеристик плавучего основания из двух понтонов
Миделево сечение корпуса катамарана включает два понтона. Для каждого понтона вводится диаметр d, вычисляется площадь миделевого сечения понтонов А, вводится вектор координат центра тяжести Y и Z. Вводится код элемента К.
Исходные данные:
Диаметры сечений, ![]() м
м
Площади элементов S, 
Координаты центра тяжести элементов,
![]() м,
м,
![]() м
м
Код элементов ![]()
![]() сечение сплошное
сечение сплошное ![]() отверстие
отверстие
![]()
![]()
![]() круг
круг ![]()
![]() круг
круг
Расчетный модуль:
Моменты инерции элементов относительно собственных центральных осей
Координаты центра тяжести сечения, м
![]()
![]()
Моменты инерции относительно центральных осей всего сечения, м4
![]()
![]()
![]()
![]()
![]()
![]()
Угол наклона главных осей инерции, рад

![]()
Главные центральные моменты инерции, м4
![]()
![]()
![]()
![]()
![]()
![]()
Автоматизированная методика расчета качки катамаранного судна
Катамаранная плавучая машина при якорном закреплении имеет возможность совершать лишь угловые перемещения около главных осей X и Y, проходящих через ее центр тяжести и совпадающих с плоскостями симметрии, и перемещаться вдоль вертикальной оси. Угловые перемещения машины около поперечной оси ее Y (дифферент) вызываются действием ветра и волнением поверхностного слоя воды. Максимальная длина волн в искусственных водохранилищах не превышает 5-6 м. При постановке катамаранного плавучего строения поперек таких волн число их на длине понтонов, равной 10 м, будет не менее двух. Это означает, что не может быть такого случая, когда одна из оконечностей плавучего основания окажется на подошве волны, другая – на ее гребне, следовательно, вынужденные колебания плавучего строения от таких волн будут малыми. Следовательно, из дифференциальных уравнений практическую ценность имеют лишь уравнения, выражающие вертикальные и поперечные перемещения (качки) плавучего строения. Отсюда заключаем, что катамаранное плавучее строение можно рассматривать как тело, имеющее лишь две степени свободы.
Произведем расчет поперечной качки катамаранного технологического судна, считая вынужденные продольные колебания (дифферент) от ветровых волн, развиваемых на водохранилищах, малой величиной. Основными при расчете являются поперечные (крен) и вертикальные колебания. В основу расчета положены зависимости, представленные в работе Г.К. Сокольского [5].
Исходные данные:
Плотность воды, ![]() кг/м3
кг/м3
![]()
Координаты центра тяжести элементов, ![]() м
м
Осадка левого понтона, ![]() м
м
![]()
Расчетный модуль:
Кренящий момент, Н∙м
![]()
![]()
![]()
Дифференциальное уравнение поперечной качки с граничными и начальными условиями
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
С учетом амплитуды колебаний ![]() решение дифференциального уравнения имеет вид:
решение дифференциального уравнения имеет вид:
![]()
![]()
![]()
![]()

![]()
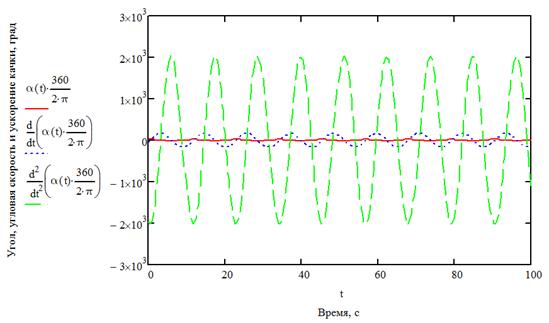
Рис. 6. Изменение угла, угловой скорости и ускорения поперечных колебаний от времени
Выводы
-
Разработана автоматизированная методика расчета тонкостенной оболочки корпуса технологического судна с изменяемой геометрией на основе гибких композитных материалов в среде MathCAD, позволяющая определить необходимую толщину оболочки при заданном внутреннем давлении и геометрических характеристиках.
-
Автоматизированный расчет геометрических характеристик плавучего основания из двух понтонов позволяет определить координаты центров тяжести поперечных сечений, моменты инерции относительно центральных осей, угол наклона главных осей симметрии и главные центральные моменты инерции понтонов плавучего основания.
-
Представленная автоматизированная методика расчета поперечной качки катамаранного технологического судна на основе дифференциального уравнения поперечной качки с граничными и начальными условиями позволяет определить угол, угловую скорость и ускорения качки. Аналогичный расчетный модуль может быть получен для случаев вертикальных и продольных колебаний.
Рецензенты:
Полянин И.А., д.т.н., профессор, зав. кафедрой транспортно-технологических машин, ФГБОУ ВПО «Поволжский государственный технологический университет», г. Йошкар-Ола;
Царев Е.М., д.т.н., профессор, профессор кафедры технологии и оборудования лесопромышленных производств ФГБОУ ВПО «Поволжский государственный технологический университет», г. Йошкар-Ола.
Библиографическая ссылка
Поздеев А.Г., Кузнецова Ю.А., Ржепкин А.Ю. АВТОМАТИЗИРОВАННАЯ МЕТОДИКА РАСЧЕТА КАТАМАРАННОГО ОСНОВАНИЯ ТЕХНОЛОГИЧЕСКОГО СУДНА // Современные проблемы науки и образования. 2014. № 5. ;URL: https://science-education.ru/en/article/view?id=15263 (дата обращения: 30.06.2026).