


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
INVESTIGATION STATIC AND DYNAMIC OF CLOSED WITHOUT SENSORS AC DRIVES OWN NEEDS OF TPP FOR MODEL VOLTAGE REGULATOR – AC MOTOR WITH NEURAL NETWORK OBSERVER ANGULAR VELOCITY

Основными механизмами собственных нужд (СН) на тепловых электростанциях (ТЭС) являются ленточные конвейеры, мельницы, тягодутьевые машины, компрессоры, насосы и т.д. Регулируя интенсивность работы каждого механизма СН, можно добиться увеличения КПД электростанции за счет более эффективного сжигания топлива [1].
Авторам представляется перспективным внедрение замкнутых бездатчиковых асинхронных электроприводов (АЭП) по схеме ТРН – АД для автоматизации механизмов СН тепловых электростанций (ТЭС).
Система управления двигателем по схеме ТРН-АД [2] применяется в таких механизмах, как насосы и вентиляторы, а также в тех механизмах, в которых не требуется широкого диапазона регулирования скорости [3].
Система управления по схеме ТРН-АД по сравнению с частотным способом имеет свои достоинства и недостатки.
-
По данным [4], стоимость преобразователя частоты в несколько раз больше стоимости ТРН. А с увеличением мощности разница стоимости увеличивается.
-
Для определенных типов механизмов, для которых необходим небольшой диапазон регулирования скорости, достаточно использования системы управления по схеме ТРН-АД.
-
Система управления по схеме ТРН-АД имеет наиболее удобный способ управления. Так, для векторного способа управления необходимо знать правильные паспортные данные электродвигателя. Векторный способ требует сложных математических расчетов в режиме реального времени.
-
В системе управления по схеме ТРН – АД присутствуют большие потери энергии при снижении скорости, что уменьшает КПД электропривода. Но данный недостаток несущественен, если работа на пониженных скоростях кратковременна, а диапазон регулирования не больше, чем 1:4.
-
Искаженное напряжение и появление токов высших гармоник в сети может негативно сказаться на потребителях, подключенных к одной линии с ТРН – АД.
Для регулирования скорости работы каждого механизма необходимо использовать замкнутую систему управления по скорости. Использование реальных датчиков скорости для регулирования скорости приводит к удорожанию самой системы управления, увеличению частоты отказов оборудования, повышению риска взрывоопасности, увеличению габаритов оборудования [5]. Поэтому установка дополнительных измерительных приборов для измерения скорости крайне нежелательна и нецелесообразна по соображению технологического процесса.
Целью данной статьи является показать особенности построения и анализа статических и динамических режимов работы замкнутого асинхронного электропривода по схеме ТРН-АД с обратной связью от наблюдателя состояния, построенного на основе искусственной нейронной сети.
Функциональная схема микропроцессорного асинхронного электропривода по схеме ТРН-АД с обратной связью по скорости
Функциональная схема микропроцессорного (МК) асинхронного электропривода по схеме ТРН-АД с обратной связью по скорости (рис. 1) в основном состоит из таких блоков, как: микропроцессор (МК), состоящий из регулятора скорости (РС) и системы управления (СУ), тиристорный регулятор напряжения (ТРН), асинхронный двигатель (АД), датчики тока (ДТ) и напряжения (ДН). Обратная связь по скорости может быть организована через датчик скорости (ДС) или наблюдатель скорости (НС).
 а)
а) 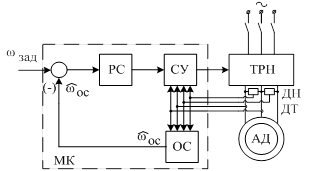 б)
б)
Рис. 1. Функциональная схема микропроцессорного асинхронного электропривода по схеме ТРН-АД с обратной связью по скорости: а) от датчика скорости, б) от наблюдателя скорости.
Функциональная схема микропроцессорного асинхронного электропривода по схеме ТРН-АД с обратной связью по скорости от датчика скорости является стандартной и пояснения работы не требует. НС проводит оценку скорости вращения вала асинхронного двигателя за счет обработки данных, полученных от датчиков тока и напряжения. Структура наблюдателя может быть различной: на основе уравнений Люенбергера, фильтра Калмана, нечеткой логики, нейро-нечеткой логики, нейронной сети и др. Каждая из схем обладает своими преимуществами и недостатками. Достоинством схемы с обратной связью по скорости от датчика является точность измерения сигнала обратной связи, а недостатком - сложность в обслуживании из-за конструктивных особенностей с высокой частотой отказов. В свою очередь схема с обратной связью от НС требует предварительной настройки, но проста в использовании, обладает менее высокой точностью оценивания, уменьшает количество отказов из-за отсутствия ДС, экономически выгодна по сравнению с предыдущей схемой.
Разработка нейросетевого наблюдателя скорости для замкнутого асинхронного электропривода по схеме ТРН-АД
Искусственная нейронная сеть в общем случае представляет собой компьютерную программу, обладающую способностью к обучению, сохранению полученного знания и представлению его оператору. Знание программа получает в процессе обучения, а полученные знания сохраняются в синаптических весах [3].
Главными особенностями для построения нейронной сети является количество слоев в скрытом слое, тип нейрона и тип самой нейронной сети. Эти параметры в основном влияют на скорость и качество обучения, а также на способность реагирования системы в динамическом режиме. Особенностью обучения нейронной сети является выбор тренировочных наборов и количество данных в каждом тренировочном наборе. Если величина данных будет слишком большой, то это может привести к переобучению ИНС, в то же время небольшое количество данных приведет к недообучению. Следствием чего будет высокая ошибка обучения.
Математически определение мгновенной величины оценки частоты вращения ротора двигателя определяется по формуле [8]:
 ,
,
где m – количество нейронов в скрытом слое,
n – количество нейронов во входном слое,
w1ji – синаптический вес i-го входа j-го нейрона скрытого слоя,
w1j0 – сдвиг j-го нейрона скрытого слоя,
w2j – синаптический вес j-го входа нейрона выходного слоя,
w20 – сдвиг нейрона выходного слоя,
xi – входные сигналы искусственной нейронной сети.
АЭП СН ТЭС является нелинейной динамической системой, а следовательно, для построения наблюдателя скорости следует применять динамические нейронные сети, выполненные, например, по схеме Элмана и Джордана. Такие сети похожи между собой тем, что имеют во входном слое, помимо входных данных, обратную связь с задержкой. Для сети Элмана обратной связью являются сигналы с внутреннего слоя сети, а для сети Джордона обратная связь с задержкой поступает от нейронов выходного слоя. Данный способ позволяет учесть предысторию событий для последующей правильности выработки стратегии управления объектом. Данные сети пригодны для управления движущимися объектами, так как обладают функцией запоминания предыстории событий.
В [8] был разработан способ определения оценки частоты вращения асинхронного двигателя на основе сети Джордона. Входными данными в этой ИНС являются сигналы с датчиков фазных токов, фазных напряжений (и их задержки) и обратная связь по оценке частоты вращения асинхронного двигателя с задержкой. Таким образом, количество нейронов во входном слое равно 17, в скрытом – 80, в выходном – 1. Функцией активации всех нейронов скрытого слоя является гиперболический тангенс, выходного слоя – линейная. Нейроны входного слоя передают данные скрытому слою без преобразования.
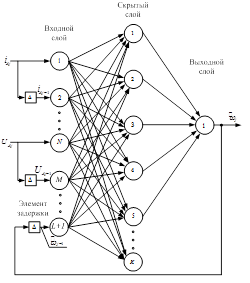
Рис. 2. Структурная схема нейронной сети.
Исследование статических механических и электромеханических характеристик замкнутого асинхронного ЭП по схеме ТРН-АД
Согласно [9] уравнение, описывающее статические механические характеристики замкнутого асинхронного ЭП по схеме ТРН-АД с ДС, имеет вид:
![]() (1)
(1)
где ![]() - скорость идеального холостого хода,
- скорость идеального холостого хода, ![]() – модуль жесткости, которая определяется заданием и коэффициентом обратной связи по скорости
– модуль жесткости, которая определяется заданием и коэффициентом обратной связи по скорости ![]() . При большем значении
. При большем значении ![]() жесткость искусственных механических характеристик получается значительной, и можно считать, что уравнение (1) удовлетворительно описывает реальную механическую характеристику.
жесткость искусственных механических характеристик получается значительной, и можно считать, что уравнение (1) удовлетворительно описывает реальную механическую характеристику.
При данном способе регулировании скорости потери в роторной цепи пропорциональны скольжению. Для двигателей с независимой вентиляцией работа на низких скоростях возможна при снижении его нагрузки в обратно пропорциональной зависимости от скольжения. Для двигателей с самовентиляцией снижение нагрузки должно быть значительнее. Это связано с ухудшениями условий вентиляции двигателя на малых скоростях [9].
Учитывая вышесказанное, область применения данного способа управления ограничивается механизмами, у которых момент нагрузки при регулировании скорости уменьшается [9] - например, механизмы с вентиляторной нагрузкой, к числу которых относится большинство механизмов СН ТЭС.
Для поддержания электроприводом скорости при различных значениях момента необходимо проверить жесткость механических характеристик для разомкнутой и замкнутой системы.
Жесткость механической характеристики определяется по формуле [7]:
![]()
где ![]() - изменение момента на единицу длины,
- изменение момента на единицу длины, ![]() - изменение скорости на ту же единицу длины. Чем больше жесткость k характеристики, тем лучше система поддерживает постоянство скорости.
- изменение скорости на ту же единицу длины. Чем больше жесткость k характеристики, тем лучше система поддерживает постоянство скорости.
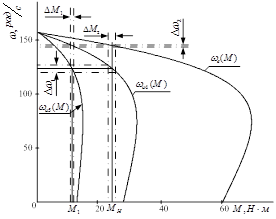
Механические характеристики для разомкнутой и замкнутой системы представлены на рис. 3.
 а)
а) 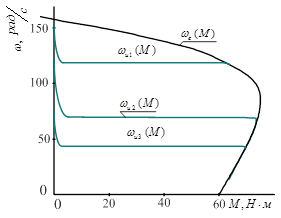 б)
б)
Рис. 3. Механическая характеристика а) разомкнутого и б) замкнутого асинхронного электропривода по схеме ТРН – АД: ![]() - искусственные механические характеристики при скорости задания 120
- искусственные механические характеристики при скорости задания 120 ![]() , 70
, 70 ![]() , 40
, 40 ![]() , напряжения задания 150
, напряжения задания 150 ![]() , 120
, 120 ![]() ;
; ![]() - естественная механическая характеристика,
- естественная механическая характеристика, ![]() - изменение скорости и момента на одну единицу длины для вычисления коэффициента жесткости.
- изменение скорости и момента на одну единицу длины для вычисления коэффициента жесткости.
Из рисунка 3 видно, что жесткость механической характеристики выше в замкнутом асинхронном электроприводе по схеме ТРН – АД. Сравнение коэффициента жесткости для замкнутого и разомкнутого АЭП по схеме ТРН – АД для естественной и искусственной характеристики представлена в табл. 1.
Таблица 1. Сравнительная таблица коэффициента жесткости для замкнутой и разомкнутой схемы
|
|
Замкнутая схема |
Разомкнутая схема |
||
|
|
|
|
|
|
|
Коэффициент жесткости |
37,2 |
38,57 |
0,466 |
0,255 |
Исследование динамических режимов замкнутого асинхронного ЭП по схеме ТРН-АД
Проверка работоспособности созданного наблюдателя скорости проводится на имитационной модели во всех основных технологических режимах работы [7]:
-
пуск ЭП при разных значениях управления и нагрузки [7];
-
наброс и сброс нагрузки [7].
Цикл работы ЭП с нейросетевым наблюдателем скорости представлен на рис. 4. Из имитационного моделирования видно, что бездатчиковый асинхронный электропривод по схеме ТРН – АД с нейросетевым наблюдателем угловой скорости обеспечивает технические требования.
Оценить интегральную оценку качества можно в таблице 2 (рис. 5) при различных технологических режимах работы электропривода.
Формула интегральной оценки имеет вид [7]:
где ![]() - скорость вращения вала асинхронного электропривода,
- скорость вращения вала асинхронного электропривода, ![]() - оценка скорости вращения вала асинхронного электропривода.
- оценка скорости вращения вала асинхронного электропривода.
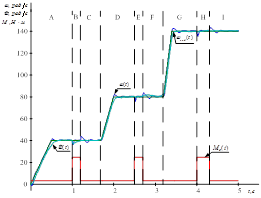
Рис. 4. Цикл работы асинхронного электропривода по схеме ТРН – АД с нейросетевым наблюдателем угловой скорости: A, B, C – пуск до ![]() ; D, E, F – пуск до
; D, E, F – пуск до ![]() ; G, H, I – пуск до
; G, H, I – пуск до ![]() ; B, E, H – наброс нагрузки
; B, E, H – наброс нагрузки ![]() ; C, F, I – сброс нагрузки.
; C, F, I – сброс нагрузки.
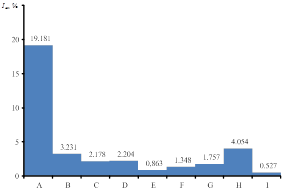
Рис. 5. Гистограмма интегральной оценки качества на всех участках работы асинхронного электропривода по схеме ТРН – АД с нейросетевым наблюдателем угловой скорости.
Таблица 2. Интегральная оценка качества управления
|
|
A |
B |
C |
D |
E |
F |
G |
H |
I |
|
|
0 |
1 |
1,2 |
1,7 |
2,5 |
2,7 |
3,2 |
4 |
4,3 |
|
|
1 |
1,2 |
1,7 |
2,5 |
2,7 |
3,2 |
4 |
4,3 |
5 |
|
|
19,181 |
3,231 |
2,178 |
2,204 |
0,863 |
1,348 |
1,757 |
4,054 |
0,527 |
Выводы
-
Показана перспективность применения бездатчиковых асинхронных электроприводов для автоматизации механизмов собственных нужд тепловых электростанций.
-
Показано, что в замкнутом асинхронном электроприводе собственных нужд тепловых электростанций значительно возрастает жесткость механических характеристик за счет контуров обратной связи.
-
Проведено исследование динамических режимов асинхронного электропривода при пуске с датчиком интенсивности при набросе и сбросе нагрузки. С применением интегральной оценки качества доказано приемлемое качество процессов управления в замкнутом асинхронном электроприводе по схеме ТРН-АД.
-
Использование нейроэмулятора для оценки угловой скорости в механизмах собственных нужд тепловых электростанций позволит значительно уменьшить издержки на этапе проектирования и обслуживания электропривода.
Рецензенты:
Усов Ю.П., д.т.н., процессор кафедры ЭСиЭ ЭНИН ФГБОУ ВПО «Национальный исследовательский Томский политехнический университет», г. Томск.
Исаев Ю.Н., д.ф.-м.н., процессор кафедры ЭСиЭ ЭНИН ФГБОУ ВПО «Национальный исследовательский Томский политехнический университет», г. Томск.
Библиографическая ссылка
Козлова Л.Е., Боловин Е.В. ИССЛЕДОВАНИЕ СТАТИКИ И ДИНАМИКИ ЗАМКНУТОГО БЕЗДАТЧИКОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА СОБСТВЕННЫХ НУЖД ТЭС ПО СХЕМЕ ТРН – АД С НЕЙРОСЕТЕВЫМ НАБЛЮДАТЕЛЕМ УГЛОВОЙ СКОРОСТИ // Современные проблемы науки и образования. 2014. № 3. ;URL: https://science-education.ru/en/article/view?id=13581 (дата обращения: 17.05.2026).