


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
REDUNDANCY PRINCIPLES OF REMOTE CONTROL SYSTEMS USE THE BASIC PROTOCOL IEC 870-5-101

Одновременное функционирование в энергетической отрасли информационно-управляющих телемеханических комплексов (ИУТК) большого числа производителей поставило проблему обеспечения совместимости разных устройств в рамках одной системы телемеханики. Так как внешняя совместимость практически полностью определяется реализацией информационных обменов между центральным пунктом управления (ПУ) и контролируемыми пунктами (КП), актуальным стал выбор базового протокола (БП) [1,2]. Для ИУТК, ориентированных на использование современных цифровых каналов связи, в качестве базового выбран протокол IEC 60870-5-101 (104) по ГОСТ Р МЭК 870-5-101 (104), поэтому в статье анализируются параметры систем телемеханики, использующих БП. Так как БП должен учитывать множество вариантов его использования, потери эффективности информационных обменов и надежности информации в ИУТК неизбежны, что делает актуальной задачу их минимизации.
Обычной практикой повышения надежности системы телемеханики является резервирование. Целесообразно резервировать компоненты системы, через которые проходят наибольшие потоки информации – ПУ, каналы связи КП – ПУ и контроллер устройства КП. В руководстве по применению БП не рассматриваются процедуры формирования информационных сообщений с учетом резервирования каналов связи. Поэтому представляет интерес определение возможных структур резервированных устройств КП, которые должны обеспечить резервирование каналов связи.
Технические требования к устройствам КП с большими объемами информации или сопряженные с источниками важной информации обязывают организовать передачу информации по основному и резервному каналу связи по двум независимым направлениям передачи, что, по сути, эквивалентно необходимости организации передачи данных по четырем независимым направлениям. Структурная схема такого КП приведена на рис.1 [3].
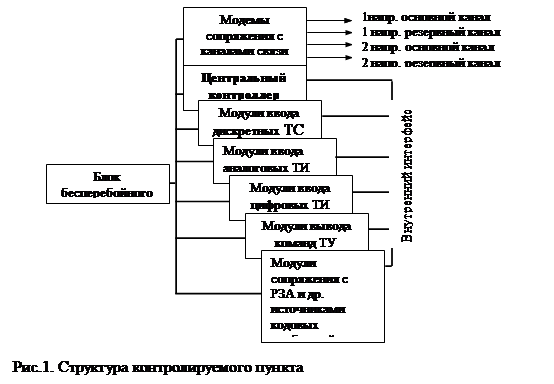
Связующим звеном устройства является центральный контроллер – супервизор внутренней магистрали, объединяющей все модули устройства. Модули обеспечивают:
- ввод дискретных сигналов от датчиков телесигнализации (ТС);
- ввод телеизмерений (ТИ) от нормирующих преобразователей в виде аналоговых сигналов;
- ввод кодовых телеизмерений от многоканальных цифровых преобразователей измеряемых параметров;
- вывод команд телеуправления исполнительными механизмами;
- информационный обмен с источниками массивов кодовых сообщений, например устройств защиты и автоматики (УЗА), реклоузеров и т.п.
Данные, получаемые центральным контроллером, направляются в резервированные каналы связи через соответствующие модемы (в приведенном примере – по двум каналам в каждое из двух направлений передачи).
Устройства КП выполняются по схеме с сосредоточенным и рассредоточенным интеллектом. Особенности построения модулей указанных типов КП иллюстрируются на рис.2 и 3.
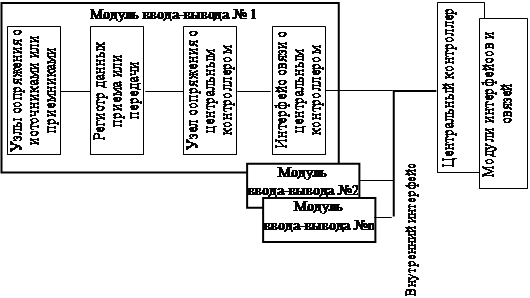
Рис.2. Обобщенная схема КП с сосредоточенным интеллектом
В первом варианте реализации модулей аппаратура и программы обработки, проверки достоверности, привязки информации к меткам времени сконцентрированы в центральном контроллере. Модули реализуют процедуры циклического ввода и вывода данных по командам от центрального контроллера.
Во втором варианте процедуры ввода-вывода и обработки данных проводятся непосредственно в функциональном модуле, а центральный контроллер реализует диспетчерские функции при передаче и приеме информации из линий связи с пунктом управления.
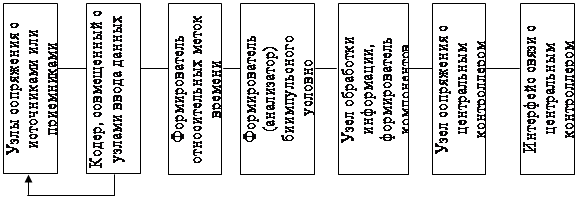
Рис.3. Обобщенная схема КП с рассредоточенным интеллектом
Рассмотрим возможность построения резервированных структур для первого варианта, когда информационные сообщения, передаваемые от КП в ЦППС (ПУ), синтезируются общим для всех модулей центральным контроллером, в который периодически и поочередно вводятся текущие данные модулей. Контроллер в процессе обработки текущей информации сканирует созданную общую базу данных и определяет необходимость формирования информационного сообщения по заданным критериям фиксации событий для передачи.
Предположим, что контроллер формирует только по одному буферу для передачи информации по одному направлению, т.е., в общей сложности, в контроллере создается четыре информационных буфера с сообщениями в формате БП. Очевидно, что наибольшая глубина резервирования достигается, если информационные сообщения, предназначенные для передачи по каналам связи, формируются разными контроллерами разных устройств КП. Однако процедуру сканирования базы данных независимых контроллеров и практически невозможно синхронизировать, поэтому весьма вероятно, что информационные сообщения, сформированные разными контроллерами, не будут идентичными, что, при необходимости создания идентичной базы данных в разных каналах связи, наличии единой базы данных, исключает применение описанного метода резервирования.
Алгоритмические сложности возникают, если в ответ на переданное по всем каналам связи сообщение подтверждающая «квитанция» поступает не от всех приемников. Важно также учесть, что при несинхронных каналах связи синхронизировать время начала передачи сформированного информационного сообщения по каналам связи практически невозможно. В результате для реализации «горячего» резервирования контроллер КП должен выравнивать информационные обмены по худшему из вариантов. Фактически такая ситуация заставляет производителей систем телемеханики переходить от горячего резервирования к холодному, что создает опасность потери части информации во время переключения каналов связи.
В таком варианте время информационного обмена tинф1 равно [4,5]:
tинф1 = T1 + 2(T2 + T3 + T4+Т5+Т6 ) , (1)
где T1 – задержка от момента формирования сообщения до получения запроса от ПУ . Максимальное значение T1 равно tинф1 , так как в самом неблагоприятном случае необходимость передачи КП нового сообщения возникает сразу после начала передачи ранее сформированного. Примем:
T1=0,5 tинф1 . (2)
T2 – время получения запроса от ПУ. В соответствии со структурой БП вызов информации от ПУ представляется сообщением длиной в 64 бит, поэтому
T2 = ![]() , ( 3)
, ( 3)
где FКС – скорость передачи информации по КС.
T3 – время задержки реакции КП на команду от ПУ может быть оценен величиной
T3
= 0,5T2=![]() .
(4)
.
(4)
T4 – время передачи по КС одного сообщения равно:
Т4 =![]() , (5)
, (5)
где N – общее число сигналов в сообщении.
T5 – время ввода полученной информации в КС определяется как:
![]() ,
(6)
,
(6)
Т6 – суммарное время между завершением ввода информации в линейный блок устройства ПУ и вводом данных в контроллер ПУ:
Т6
= ![]() ККП TДИСКР , (7)
ККП TДИСКР , (7)
где ![]() –
число линейных блоков приема данных от КП, от которых к данному времени
принято сообщение с признаком отсутствия «события» для передачи; ККП – коэффициент, учитывающий
смещение номера модуля, принявшего информационное сообщение от КП, относительно
модуля, который в данный момент опрашивается контроллером ПУ или начал вывод
информации, полученной от другого устройства КП; TДИСКР – интервал времени между опросом
информации смежных линейных блоков ПУ.
–
число линейных блоков приема данных от КП, от которых к данному времени
принято сообщение с признаком отсутствия «события» для передачи; ККП – коэффициент, учитывающий
смещение номера модуля, принявшего информационное сообщение от КП, относительно
модуля, который в данный момент опрашивается контроллером ПУ или начал вывод
информации, полученной от другого устройства КП; TДИСКР – интервал времени между опросом
информации смежных линейных блоков ПУ.
Таким образом, общее время информационного обмена [4-6]:
tинф1= 0,5 tинф1 +2 ![]()
![]() +
+ ![]() +
+ ![]() +
+![]() +
+ ![]() ККП
TДИСКР ]. (8)
ККП
TДИСКР ]. (8)
Например, при ![]() =25,
N = 64, ККП =0,5, TДИСКР = 10-2 с, FКС = 1200 Бод, Fинт = 10 6
Бод имеем tинф1
> 1,03 с.
=25,
N = 64, ККП =0,5, TДИСКР = 10-2 с, FКС = 1200 Бод, Fинт = 10 6
Бод имеем tинф1
> 1,03 с.
Выше была доказана сложность организации «горячего» резервирования при формировании информационных сообщений центральным контроллером устройства КП. С другой стороны, можно показать, что при формировании информационных сообщений модулями-источниками функциональная нагрузка на центральный контроллер резко сокращается и в основном ограничивается выполнением процедур ретрансляции полученных от модулей данных в ПУ, а сообщений, полученных от ПУ, – в модули устройства КП.
Действительно, в данном случае время информационного обмена tинф2 равно:
tинф2=![]() =0,5 tинф2 +
=0,5 tинф2 +![]() +
+![]() +
+![]() . (9)
. (9)
Для рассмотренных выше данных tинф2 =0,19 с, т.е. в пять раз ниже, чем при первом варианте.
Контроллер не формирует общую базу данных, не обрабатывает полученные данные для фиксации возникновения «событий». Поэтому в контроллере, без существенного усложнения аппаратуры и программного обеспечения, можно организовать стеки буферов – по одному для основного и резервного канала связи, а также для независимой передачи информации по нескольким направлениям. В стеки заносятся «почти готовые» информационные сообщения от модулей-источников. Важно подчеркнуть, что информационные сообщения в стеки вводятся синхронно по мере их поступления от модулей-источников, а выводятся в каналы связи – асинхронно, при получении команды вызова (разрешения передачи информации) от «master» соответствующего канала связи. Таким образом, рассматриваемый алгоритм работы контроллера позволяет регулировать поток передаваемых данных в зависимости от производительности канала связи. При определении периодичности повторной передачи сообщения может учитываться приоритет информации, включенной в каждое сообщение.
Важно, что алгоритм работы контроллера идентичен при проведении информационных обменов с одним устройством ПУ по нескольким каналам связи или при работе по каналам связи с разными устройствами ПУ. Таким образом, показано, что метод автономного формирования компонентов БП модулями-источниками информации позволяет увеличить эффективность и достоверность информации.
Выводы
Результаты проведенных исследований показали, что некорректное построение аппаратуры устройств, использующих для проведения информационных обменов КП-ПУ при использовании протокола IEC 60870-5-101 (104):
а) снижает потенциальную производительность (пропускную способность канала связи) в 3–5 раз;
б) требует применения сверхбыстродействующих внутренних интерфейсов и высокопроизводительных процессоров обработки информации в устройствах КП, включающих общий для всех модулей контроллер;
в) приводит к практической невозможности выполнения устройства КП по рассредоточенной схеме;
г) существенно усложняет реализацию горячего резервирования каналов информационного обмена КП с ПУ.
Рецензенты:Лисов О.И., д.т.н., профессор кафедры «Информатика и программное обеспечение вычислительных систем» Национального исследовательского университета «МИЭТ», Москва.
Гагарина Л.Г., д.т.н., профессор, зав. кафедрой «Информатика и программное обеспечение вычислительных систем» Национального исследовательского университета «МИЭТ», г. Москва.
Библиографическая ссылка
Баин А.М., Портнов Е.М. ПРИНЦИПЫ РЕЗЕРВИРОВАНИЯ СИСТЕМ ТЕЛЕМЕХАНИКИ ПРИ ИСПОЛЬЗОВАНИИ БАЗОВОГО ПРОТОКОЛА МЭК 870-5-101 // Современные проблемы науки и образования. 2014. № 2. ;URL: https://science-education.ru/en/article/view?id=12454 (дата обращения: 29.06.2026).