


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
MODEL OF SITUATIONAL MANAGEMENT SYSTEM OF FLEXIBLE TRANSMISSION LINES IN POWER SYSTEM NORMAL STATE

Введение
На данном этапе развития технического прогресса проблемы оптимальной загрузки элементов электроэнергетической системы (ЭЭС) с несколькими источниками питания с целью снижения потерь мощности и энергии могут быть решены при помощи гибких (управляемых) линий электропередач. В работах [2, 3] была рассмотрена и доказана возможность регулирования потоков активной мощности за счёт изменения угла рассогласования между напряжениями двух независимых источников питания. Этот принцип предполагает наличие фазосмещающего устройства, в данном случае фазорегулятора. В смежных работах [8] была синтезирована и изучена система управления исполнительным механизмом для данного способа управления активной мощностью. Однако, вследствие того, что ЭЭС является сложноподчинённой структурой, в которой многие параметры зависят друг от друга, управление величиной только активной мощности без учёта остальных параметров режима ЭЭС может повлечь за собой снижение устойчивости и, как следствие, надежности электроснабжения. Поэтому в рамках разработки автоматизированной системы управления ЭЭС в нормальном режиме работы должен быть изучен вопрос совместного регулирования ряда параметров установившегося режима ЭЭС.
Цель исследования снижение потерь активной мощности при распределении электрической энергии в системе электроснабжения с несколькими источниками питания.
Методы исследования: анализ литературных источников по теме, построение математической модели, математическое моделирование, анализ результатов моделирования.
Результаты исследования и их обсуждение
Для решения поставленной цели были проанализированы решения по управлению параметрами режима сети. Учитывая положительный опыт применения принципов ситуационного управления ЭЭС как сложноподчиненным объектом управления, описанный в [6], было предложено включить в структуру автоматизированной системы блок реализующий принцип ситуационного управления. Данный блок позволит корректно обрабатывать информацию о состоянии ЭЭС и ускорить реакцию системы управления на однотипные возмущающие воздействия.
Для обеспечения гибкости регулирования параметров ЭЭС была предложена структура автоматизированной системы управления ЭЭС в нормальных режимах работы (АСУ ЭЭС НР) (рис. 1), включающая блоки управления потоками активной мощности, компенсации реактивной мощности, управления параметрами качества электрической энергии и параметрами питающих линий.
Объектом управления является электроэнергетическая система. После процедуры АЦП данные мониторинга параметров ЭЭС x поступают в систему ситуационного управления. Рассматриваемая система связана с базой данных режимов, в которой хранятся параметры режимов соответствующие тому или иному состоянию ЭЭС. На основании данных непрерывного мониторинга x и данных из БД p система ситуационного управления идентифицирует и классифицирует состояние ЭЭС.
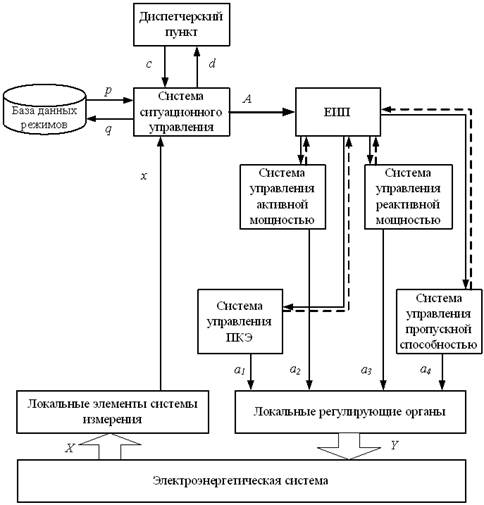
Рисунок 1 – Структурная схема АСУ ЭЭС НР
На основании задающего воздействия от диспетчерского пункта с и сведений о состоянии ЭЭС система ситуационного управления формирует вектор управляющих воздействий A для перевода ЭЭС в требуемое состояние либо сохранение текущего состояния под воздействием внешних возмущений.
В состав автоматизированной системы управления входят 4 блока систем управления локальными регулирующими органами. Каждая из систем отвечает за управление множества групп устройств регулирования, объединённых для решения одной из глобальных задач: управление показателями качества ЭЭС; управление потоками активной мощности; управление потоками реактивной мощности; управление пропускной способностью питающих линий.
Ввиду того, что нельзя определённо отнести тот или иной вид регулирующих органов целиком к подсистеме решения определённой задачи, то и невозможно чётко провести границу между системами управления. Поэтому единая система управления регулирующими органами с целью упрощения алгоритмической структуры была условно разбита на 4 составляющие, однако сохранившие связь и возможность координировать собственные действия между собой посредством единого информационного пространства, что позволяет компенсировать взаимосвязь параметров при изменении одного из них.
Каждая из систем управления исполнительными механизмами осуществляет поиск оптимального решения в контролируемой области, из чего формируются совокупности управляющих воздействий для регулирующих органов (а1, а2, а3, а4).
В качестве используемого был принят алгоритм ситуационного управления, подробно описанный в [6]. Данный алгоритм хорошо зарекомендовал себя при использовании на сложноподчиненных структурах. Практическая реализация принципа ситуационного управления связана с разделением множества состояний объекта на подмножества по количеству возможных планов управления. Затем необходимо текущее состояние по ряду признаков отнести к одному из полученных ранее подмножеств состояний и применить к нему известный план управления.
Ядром ситуационного управления можно определить идентификацию состояния объекта. На практике часто невозможно исследовать все состояния объекта управления ввиду сложности организации и высокой стоимости проведения натурных испытаний. Поэтому актуальным является построение адекватной модели объекта управления, а также применение эффективных методов идентификации состояния. В ходе анализа работ [4, 5, 6] были выявлены положительные результаты использования элементов нечеткой логики как инструмента идентификации состояния сложноподчиненных структур.
Формирование управляющего воздействия в свете приложения описанного алгоритма работы представляет собой следующее: система производит анализ нового состояния, путём приведения параметров режима ЭЭС к величинам, с которыми работает аппарат распознавания (например, рассчитываются потери напряжения на каком-либо участке сети). Далее текущее состояние ЭЭС распознается, т.е. относится к одному из известных (записанных в БД режимов) классов на основании решающего правила по ряду признаков из рабочего словаря, используя аппарат нечёткой логики.
Если не удаётся сопоставить текущее состояние с одним из известных классов, система производит идентификацию и оптимизацию нераспознанного состояния. Затем производится присвоение идентифицированного состояния определенному классу либо отнесение к новому классу. Далее происходит запись сведений о новом состоянии в БД режимов с уточнением/расширением соответствующего класса. После успешного распознавания состояния производится оценка соответствия параметров режима ЭЭС задающему воздействию. При обнаружении несоответствия система формирует на основании данных БД режимов оптимальный вектор управляющих воздействий для систем управления исполнительными органами.
С целью апробации системы управления и получения сведений о возможном снижении потерь активной мощности и энергии в ЭЭС необходима практическая реализация. Но так как реализовать её физически не представляется возможным, было предложено воспользоваться математической моделью, построенной с помощью программного комплекса MATLAB.
В качестве объекта моделирования для апробации АСУ ЭЭС НР был выбран узел ЭЭС, получающий питание от двух независимых источников. На рис. 2 представлена модель узла ЭЭС. Данный узел получает питание от «Источника питания 1» и «Источника питания 2», через «Линию электропередач 1» и «Линию электропередач 2» соответственно. В качестве нагрузки используются 2 модели асинхронных двигателей «Нагрузка 1» и «Нагрузка 2».
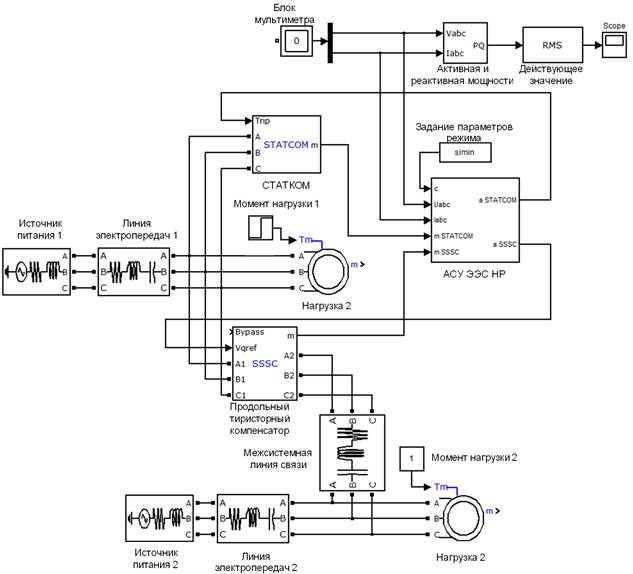
Рисунок 2 – Модель узла электроэнергетической системы
На основании методики создания собственных моделей в MATLAB, описанной в [7], была создана модель АСУ ЭЭС НР, структура которой представлена на рис. 5.
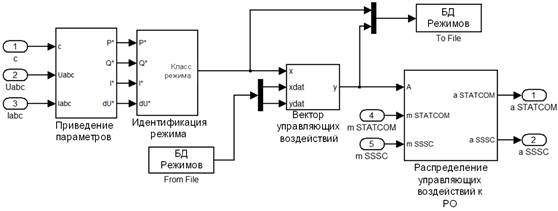
Рисунок 5 – Модель АСУ ЭЭС НР
С целью уменьшения вычислительной работы на начальных этапах моделирования были учтены только 4 параметра, характеризующие режим. К ним относятся значения активной и реактивной мощности нагрузки, тока и установившегося отклонения напряжения. Данные параметры приводятся к системе относительных единиц на основании задания параметров режима. После этого относительные параметры подаются на вход в подсистему «Идентификации режима», в которой на основании правил нечёткой логики определяется класс режима. Правила нечеткого вывода, использованные при идентификации режима приведены в табл. 1. Используя совокупность значений классов режима и оптимальных воздействий на РО из «БД Режимов» система формирует вектор управляющих воздействий, который обрабатывается подсистемой «Распределения управляющих воздействий к РО».
Таблица 1 – Набор правил нечёткого вывода
|
№ п/п |
Правило нечёткого вывода |
|
1 |
IF (input1 is P 0-1mf1) AND (input2 is Q 0-1mf1) AND (input3 is I 0-1mf1) AND (input4 is dU 0-1mf1) THEN (output1 is outmf1) (1) |
|
2 |
IF (input1 is P 0-1mf1) AND (input2 is Q 0-1mf1) AND (input3 is I 0-1mf1) AND (input4 is dU 0-1mf2) THEN (output1 is outmf2) (1) |
|
3 |
IF (input1 is P 0-1mf1) AND (input2 is Q 0-1mf1) AND (input3 is I 0-1mf2) AND (input4 is dU 0-1mf1) THEN (output1 is outmf3) (1) |
|
4 |
IF (input1 is P 0-1mf1) AND (input2 is Q 0-1mf1) AND (input3 is I 0-1mf2) AND (input4 is dU 0-1mf2) THEN (output1 is outmf4) (1) |
|
5 |
IF (input1 is P 0-1mf1) AND (input2 is Q 0-1mf2) AND (input3 is I 0-1mf1) AND (input4 is dU 0-1mf1) THEN (output1 is outmf5) (1) |
|
6 |
IF (input1 is P 0-1mf1) AND (input2 is Q 0-1mf2) AND (input3 is I 0-1mf1) AND (input4 is dU 0-1mf2) THEN (output1 is outmf6) (1) |
|
7 |
IF (input1 is P 0-1mf1) AND (input2 is Q 0-1mf2) AND (input3 is I 0-1mf2) AND (input4 is dU 0-1mf1) THEN (output1 is outmf7) (1) |
|
8 |
IF (input1 is P 0-1mf1) AND (input2 is Q 0-1mf2) AND (input3 is I 0-1mf2) AND (input4 is dU 0-1mf2) THEN (output1 is outmf8) (1) |
|
Примечание: второе состояние нечеткого логического ввода input 1 is P 0-1mf2, дающее еще 8 классов режима, не представлено |
|
Описанная выше модель узла электроэнергетической системы, режим которого находится под управлением АСУ ЭЭС НР, была испытана при значениях максимальной нагрузки 60 кВт. До момента наброса нагрузки суммарная активная мощность составляла 40 кВт. В момент времени t=0,5 с происходит увеличение суммарной мощности нагрузки в 1,5 раза.
Результаты моделирования представлены в виде графиков суммарного потребления активной мощности, потребляемой нагрузкой и получаемой из сети (рис. 3). Данная форма представления хорошо отображает суммарные потери в распределительной сети.
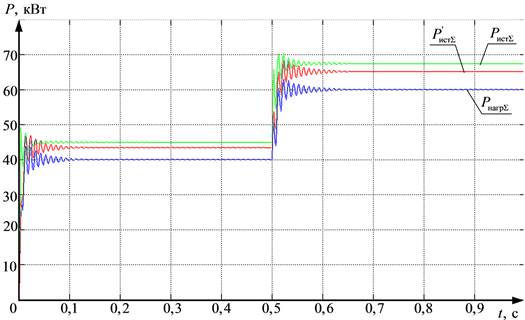
Рисунок 3 – Диаграмма потребления активной мощности: PнагрΣ – значение суммарной активной мощности, потребляемой нагрузкой; PистΣ – значение активной мощности, потребляемой из сети без управления потоками; P’истΣ – значение активной мощности, при использовании АСУ ЭЭС НР.
При максимальной нагрузке PнагрΣ = 60 кВт потребление без использования АСУ ЭЭС НР составляет порядка PистΣ = 67,48 кВт, а при моделировании управления с помощью АСУ ЭЭС НР – P’истΣ = 65,2 кВт. Эффект от автоматизации управления режимами ЭЭС составляет 2,28 кВт, что составляет 3,8 % от суммарной мощности нагрузки.
Выводы: Результаты апробации АСУ ЭЭС НР на модели указывают на возможность применения предлагаемой системы управления гибкими линиями электропередач для снижения потерь активной мощности и энергии в нормальных режимах работы.
Таким образом, разработанная система ситуационного управления гибкими линиями электропередач представляет интерес на только как инструмент оптимизации параметров нормального режима работы ЭЭС, но и как возможная система ограничения и ликвидации аварийных режимов. Актуальным является и дальнейшее расширение базы состояний нормальных режимов работы и их оптимизация.
Рецензенты:
Аликин В.Н., д.т.н., профессор, советник генерального директора Федерального казённого предприятия «Пермский пороховой завод», г. Пермь.
Закиров Д.Г., д.т.н., профессор, главный научный сотрудник Федерального государственного бюджетного учреждения науки Горный институт Уральского отделения Российской академии наук, г. Пермь.
Библиографическая ссылка
Ромодин А.В., Лейзгольд Д.Ю. МОДЕЛЬ СИСТЕМЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ ГИБКИМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧИ В НОРМАЛЬНЫХ РЕЖИМАХ РАБОТЫ // Современные проблемы науки и образования. 2013. № 6. ;URL: https://science-education.ru/en/article/view?id=11670 (дата обращения: 01.07.2026).