


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
INTEGRATED METHODOLOGY OF ESTIMATION OF ACTIVE SAFETY CHARACTERISTICS OF LIGHT COMMERCIAL VEHICLES ON THE BASIS OF SIMULATION AND ROAD TESTS RESULTS

Введение
Рост скоростей движения автомобилей и интенсивности транспортных потоков заставляет уделять проблеме организации безопасного дорожного движения особое внимание. Это обуславливает наличие жестких требований безопасности, предъявляемых к конструкции современных автомобилей. В частности, важным является обеспечение активной безопасности транспортных средств, которая во многом определяется свойствами устойчивости и управляемости. Улучшению свойств активной безопасности автомобилей уделяется большое внимание как на стадии их проектирования, так и на стадии доводки, при этом о целесообразности тех или иных конструктивных решений судят не только по результатам дорожных испытаний, но также по результатам компьютерного моделирования [2,3]. Виртуальные модели транспортных средств используются для оценки их эксплуатационных свойств, определения возможных способов совершенствования конструкции, а также для оценки влияния определенных конструктивных изменений на безопасность [4 - 6]. В настоящей статье приводится описание комплексной методики оценки свойств активной безопасности легких коммерческих автомобилей по результатам имитационного моделирования и данных дорожных испытаний.
Цель исследования
Разработка методики оценки свойств активной безопасности легких коммерческих автомобилей, в условиях криволинейного движения, характерного для маневров «вход в поворот» и «переставка» (смена полосы движения).
Объекты исследования
Легкие коммерческие автомобили ГАЗ (автомобили семейства Соболь)
Методы исследования
Компьютерное моделирование и расчетная оценка свойств управляемости и устойчивости легкого коммерческого автомобиля были выполнены с использованием программного пакета SDK.Simulation. Дорожные испытания проводились на полигоне ГАЗ при поддержке специалистов Испытательной лаборатории НГТУ с использованием измерительного комплекса RaceLogic VB20SL3 20Hz GPS Data Logger With Slip, Pitch and Roll Angle.
Результаты исследования
Наиболее важными с точки зрения активной безопасности являются требования по управляемости и устойчивости, которые описаны в ГОСТ Р 52302-2004 [1], в котором представлены методики проведения испытаний для оценки статической и динамической устойчивости и управляемости автотранспортных средств по результатам дорожных и стендовых испытаний. Наиболее важными испытаниями ГОСТ Р 52302-2004 являются: вхождение в поворот и «переставка» – смена полосы движения.
Для виртуальных исследований свойств активной безопасности был разработан виртуальный полигон и пространственная модель автомобиля ГАЗ-2752 «Соболь». Параметры модели выбирались исходя из конструкторской и технической документации на автомобиль. В ходе выполнения виртуальных исследований был выполнен комплекс виртуальных заездов, имитирующих условия сертификационных испытаний по ГОСТ Р 52302-2004. Для примера, на рис. 1 показаны результаты моделирования маневра «переставка» (смена полосы движения); на рис. 2 – моделирование маневра «вход в поворот».
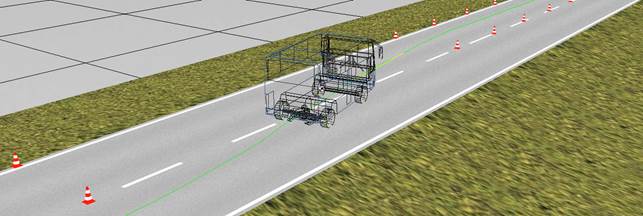
Рис. 1 – Фрагмент виртуального испытания «переставка»
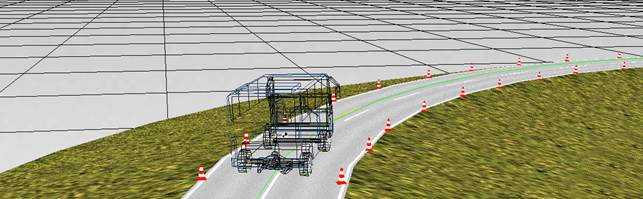
Рис. 2 – Фрагмент виртуального испытания «вход в поворот»
Параллельно с виртуальными испытаниями проводились полномасштабные дорожные испытания, в ходе которых выполнялись те же маневры, что и при моделировании. Для примера, на рис. 3 показан фрагмент испытания «переставка»; на рис. 2 – фрагмент испытания «вход в поворот».

Рис. 3 – Фрагмент сертификационных испытаний «переставка»

Рис. 4 – Фрагмент сертификационных испытаний «вход в поворот»
В ходе моделирования проводился анализ траектории движения, изменения значений вертикальных реакций на колесах модели легкого коммерческого автомобиля, анализировался характер изменения скорости транспортного средства, а также значения предельных продольных и поперечных ускорений. В ходе дорожных испытаний замерялись значения угла поворота рулевого колеса, координаты движения автомобиля, а также скорость и ускорения.
Анализ результатов движения автомобиля при маневре «переставка» показал, что при увеличении скорости маневра на 40% пиковое значение бокового ускорения центра масс возрастает на 50%. При этом наблюдается рост разницы вертикальных усилий на колесах, оказывающихся внутренними и внешними по отношению к направлению поворота (сначала автомобиль поворачивает в одну сторону, а затем в другую). По результатам моделирования было установлено, что при увеличении скорости маневра на 40% (с 50 км/ч до 70 км/ч) вертикальная нагрузка на внешних колесах по отношению к траектории поворота увеличивается на 25%, а на внутренних наоборот уменьшается также на 25%. Одновременно с этим установлено, что значение реакций на колесах не достигает минимального значения, что свидетельствует об отсутствии отрыва колес от полотна пути. Следовательно, кртическая скорость маневра обусловлена в большей степени возникновением бокового проскальзывания колес, т.е. бокового заноса автомобиля, сопровождающегося выходом из регламентированного коридора. Данное предположение было подтверждено результатами дорожных испытаний, при которых с ростом скорости маневра наблюдался вынос автомобиля за пределы регламентированного ГОСТ Р 52302-2004 коридора движения.
Анализ результатов моделирования движения автомобиля при маневре «вход в поворот» показал, что при увеличении скорости маневра на 20% пиковое значение бокового ускорения центра масс возрастает на 33%. При скорости V = 60 км/ч боковые ускорения достигают значения равного 0,8g, т.е. соответствуют значению коэффициента сцепления колес автомобиля с дорожным полотном (сухим асфальтом). Это говорит о том, что боковые усилия, воспринимаемые колесами, достигают предельного значения и дальнейшее увеличение скорости маневра приводит к сносу автомобиля с траектории. Следует отметить, что с ростом скорости маневра наблюдается уменьшение вертикальных реакций на колесах, оказывающихся внутренними по отношению к траектории поворота. Установлено, что при увеличении скорости маневра на 20% (с 50 км/ч до 60 км/ч) вертикальная нагрузка на внешних колесах по отношению к траектории поворота увеличивается практически в два раза, а на внутренних наоборот уменьшается и близка к нулю. Наименьшая вертикальная реакция наблюдается на переднем колесе автомобиля, являющимся внутренним по отношению к траектории поворота. Это свидетельствует о том, что появляется вероятность отрыва соответствующего колеса от дороги. Однако снос автомобиля с траетории происходит раньше, чем отрыв колеса от дороги, поэтому доминирующим фактором, определяющим критическую скорость совершения маневра, является занос автомобиля. Результаты дорожных испытаний подтвердили предположения, высказанные по результатам компьютерного моделирования, что свидетельствует о хорошем соответствии виртуальных и реальных испытаний.
Проведенные исследования показали хорошую сходимость результатов моделирования с данными дорожных испытаний (расхождение данных по координатам траектории движения, а также по предельным значениям продольных и боковых ускорений не превысили 10…20%). На основе указанных положительных результатов была разработана комплексная методика оценки свойств активной безопасности транспортных средств по результатам имитационного моделирования и данных дорожных испытаний. На рис. 5 показана блок-схема методики.
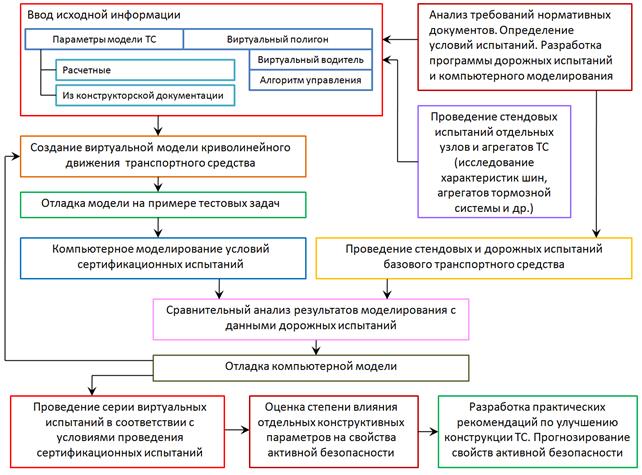
Рис. 5 – Блок схема комплексной методики оценки свойств активной безопасности транспортных средств по результатам имитационного моделирования и
данных дорожных испытаний
Разработанная комплексная методика предполагает исполнение нескольких этапов. На первом этапе выполняется ввод информации по исследуемому объекту в специализированное программное обеспечение с целью создания виртуальной модели исследуемого объекта. В ходе анализа требований нормативных документов определяются условия и параметры проведения имитационных испытаний, учитываемые при задании параметров управляющего воздействия и характеристик, имитирующих водителя, а также при создании виртуального полигона. После создания имитационной модели выполняются тестовые виртуальные испытания, по результатам которых оценивается поведение ТС и определяются параметры движения, характеризующие поведение ТС: скорости, ускорения и др. По результатам сравнения расчетных данных с данными экспериментальных исследований принимается решение об адекватности модели транспортного средства и при необходимости выполняется корректировка модели посредством уточнения характеристик и зависимостей, описывающих параметры транспортного средства и условия работы отдельных агрегатов. После установления адекватности расчетной модели становится возможным проведение виртуальных испытаний в соответствии с требованиями нормативных документов либо любые другие испытания, имеющие важное значение с точки зрения оценки свойств активной безопасности. Далее осуществляется обработка и анализ полученных результатов, по итогам которых, делается заключение в отношении эксплуатационных свойств исследуемого объекта.
На рис. 6 отдельно показана блок-схема последовательности действий, выполняемых при компьютерном моделировании криволинейного движения автомобиля.
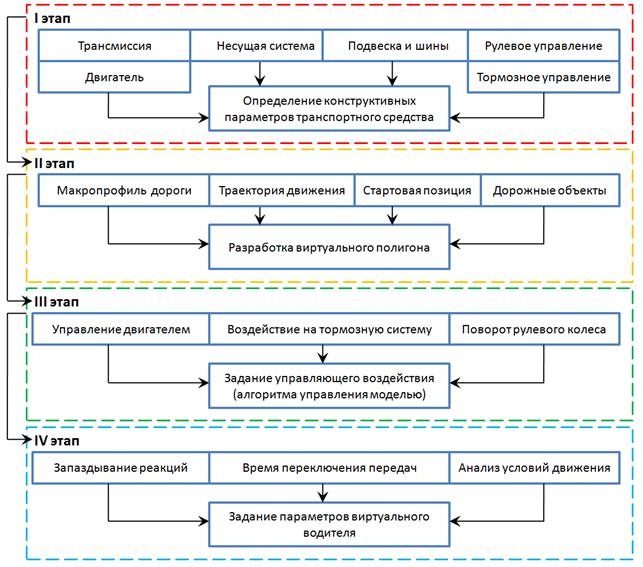
Рис. 6 – Блок-схема последовательности действий при компьютерном моделировании условий движения автомобилей
Методика, блок-схема которой показана на рис. 6, предполагает последовательное задание информации о конструкции транспортного средства, о характеристиках виртуального полигона (компьютерной модели дорожных участков), об алгоритмах управления моделью транспортного средства (последовательность действий виртуального водителя: разгон, переключение передач, воздействие на руль, торможение и др.), а также параметры виртуального водителя (время запаздывания реакций, скорость манипулирования органами управления и др.).
Значимость полученных результатов
Результаты исследования имеют важное практическое значение для конструкторских отделов предприятий Группы ГАЗ, занимающихся разработкой коммерческих автомобилей. Предложенная методика, результаты имитационного моделирования и данные дорожных испытаний могут быть использованы на стадиях проектирования и доводки различных модификаций транспортных средств с целью выбора наиболее рациональных конструктивных параметров и повышения активной безопасности автомобилей.
Результаты исследования могут быть также использованы в образовательном процессе, в частности, методика проведения виртуального моделирования и подходы в оценке эксплуатационных свойств транспортных средств по результатам имитационного моделирования и данных дорожных испытаний могут быть внедрены:
- в курсах базовых образовательных программ Института транспортных систем Нижегородского государственного технического университета им. Р.Е. Алексеева (ИТС НГТУ) при подготовке бакалавров по направлению "Наземные транспортные системы": "Испытание автомобилей" и "САПР в автомобилестроении";
- в курсах базовых образовательных программ ИТС НГТУ при подготовке магистров по направлению "Наземные транспортные системы": "Компьютерные технологии в науке и производстве", "Методы научных исследований".
Выводы
Разработанная методика позволяет достоверным образом оценивать свойства активной безопасности легких коммерческих транспортных средств. Проведенные исследования показали хорошую сходимость результатов моделирования с данными дорожных испытаний. Разработанная методика является новой, не уступает лучшим отечественным и зарубежным аналогам.
Работа выполнена при финансовой поддержке Министерства образования и науки РФ в рамках комплексного проекта по договору № 02.G25.31.0006 от 12.02.2013 г. (постановление Правительства Российской Федерации от 9 апреля 2010 года №218).
Рецензенты:
Беляков В.В., д.т.н., профессор, заведующий кафедрой «Автомобили и тракторы», руководитель Управления научно-исследовательской и инновационной работы (УНИиИР), Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Нижегородский государственный технический университет им. Р.Е. Алекссева» (НГТУ), г.Нижний Новгород.
Орлов Л.Н., д.т.н., профессор, заведующий кафедрой «Автомобили и тракторы», Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Нижегородский государственный технический университет им. Р.Е. Алексеева» (НГТУ), г.Нижний Новгород.
Библиографическая ссылка
Барахтанов Л.В., Середа П.В., Тумасов А.В., Шашкина К.М. КОМПЛЕКСНАЯ МЕТОДИКА ОЦЕНКИ СВОЙСТВ АКТИВНОЙ БЕЗОПАСНОСТИ ЛЕГКИХ КОММЕРЧЕСКИХ АВТОМОБИЛЕЙ ПО РЕЗУЛЬТАТАМ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ И ДАННЫХ ДОРОЖНЫХ ИСПЫТАНИЙ // Современные проблемы науки и образования. 2013. № 6. ;URL: https://science-education.ru/en/article/view?id=11398 (дата обращения: 01.07.2026).