



Эффективность выполнения различного вида работ на морском дне с помощью телеуправляемых необитаемых подводных аппаратов (ТНПА) определяется в значительной мере их энергетическим обеспечением, энерговооруженностью. Суммарная мощность потребителей энергии в ТНПА может достигать несколько десятков киловатт. Поэтому, выбор и проектирование системы электропитания (СЭП) имеет важное значение при разработке современных ТНПА.
Для ТНПА важнейшее значение имеет система электропитания, а именно преобразование и передача энергии по кабель-тросу. Передача энергии по кабель-тросу может осуществляться как на переменном, так и на постоянном токах[4]. Одним из решений по увеличению удельной мощности СЭП и повышению ее надежности является передача энергии по кабель-тросу (длинной до 8000 м) на переменном токе повышенной частоты (1÷2 кГц).
Цель исследования
Целью работы является анализ особенностей математического моделирования СЭП ТНПА с передачей энергии по кабель-тросу на переменном токе повышенной частоты в пакете Matlab/Simulink.
Разработка математической модели СЭП ТНПА позволитрешить ряд комплексных расчетных задач при проектировании и создании высокоэффективных СЭП ТНПА.
Объект исследования
На рис. 1 представлен вариант СЭП ТНПА с передачей энергии по кабель-тросу на переменном токе повышенной частоты[3].
Бортовая часть СЭП ТНПА содержит коммутатор сети К, вход которого соединен с судовой сетью. С коммутатора К напряжение через фильтр радиопомех ФРП поступает на выпрямитель В, затем через фильтр Ф на трехфазный автономный инвертор напряжения АИН, который повышает частоту питающего напряжения до 1000 Гц. Выход инвертора АИН соединен с первичными обмотками повышающего трехфазного трансформатора Тр, который в свою очередь повышает напряжение до величины UЛэфф=1000÷1500 В, а вторичные обмотки которого соединены с кабель-тросом, связанным с первичными обмотками трансформатора ТрГЗ подводной части, установленной на гараже-заглубителе и кабелем связи. Вторичные обмотки согласующего трансформатора ТрГЗ соединены с выпрямителями ВГЗ-600 и ВГЗ-300, формирующими питающие напряжения для гаража-заглубителя 600 и 300 В.
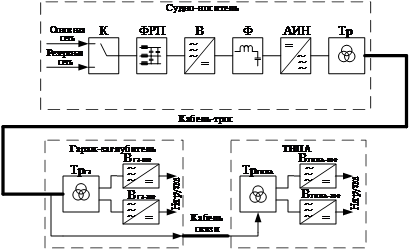
Рис. 1. Система электропитания телеуправляемого необитаемого подводного аппарата с передачей энергии по кабель-тросу на переменном токе повышенной частоты
С выхода кабеля связи напряжение поступает на первичные обмотки согласующего трансформатора ТрТНПА, расположенного на телеуправляемом необитаемом подводном аппарате. Вторичные обмотки согласующего трансформатора ТрТНПА соединены с выпрямителями ВТНПА-600 и ВТНПА-300, формирующими питающие напряжения для подводного аппарата 600 и 300 В.
Основным каналом энергопотребления на борту ТНПА является канал электропитания движителей подводного аппарата напряжением 300 В. Суммарная мощность потребления движителей аппарата составляет до 70…80% от общей мощности энергопотребления системы в целом. В связи с этим дальнейшиеисследования и анализ электромагнитных процессов, протекающих в СЭП ТНПА, а также математическое моделирование системы, проводятся для основного канала энергопотребления.
Математическое моделирование
Для исследования и анализа электромагнитных процессов протекающих в СЭП ТНПА, построенных на базе статических преобразователей широко применяются методы математического моделирования. Математическое моделирование является способом исследования рассматриваемого объекта или характеристик изучаемого явления, основанным на использовании математического описания реальных физических процессов.
Аналитические методы исследования систем требуют проведения весьма трудоемких расчетов. При наличии в системах нелинейных элементов, элементов спеременными параметрами и других усложняющих расчеты факторов возможности аналитических методов ограничены.
В настоящее время при помощи современных компьютерных технологий, в основе которых лежат прикладные программные пакеты, имеется возможность более глубокого изучения вопросов, связанных с проектированием и исследованием электротехнических комплексов со статическими преобразователями, чем и является СЭП ТНПА.
Специально для решения задач проектирования статических преобразователей и исследования процессов, протекающих в них, разработано значительное количество прикладных компьютерных пакетов, таких как Matlab/Simulink, PSpice, ElectronicsWorkbench, CircuitMarker и др. Подробное описание выше упомянутых прикладных пакетов для проектирования и исследования статических преобразователей приведено в [2].
Для исследования и анализа электромагнитных процессов протекающих в СЭП ТНПА был использован прикладной пакет Matlab/Simulink. Matlab/Simulink является интерактивной средой моделирования, предназначенной для исследования линейных и нелинейных динамических систем, состоящих из стандартных блоков, а также визуализации результатов исследования. Весомым преимуществом данного пакета является возможность объединения и совместной работы силовых схем и элементов систем управления.
Программный пакет Matlab/Simulink интерпретирует модель как систему дифференциальных уравнений и решает ее численными методами с учетом всех нелинейностей, заложенных в схеме. Метод решения дифференциальных уравнений и его параметры в данной работе подбирались экспериментально. Для моделирования использовался метод решения дифференциальных уравнений ode23tb, представляющий собой неявный метод Рунге-Кутта.
В процессе разработки модели СЭП ТНПА были приняты следующие допущения:
1) источник питания бортовой части, включающий в себя судовую сеть, фильтр радиопомех ФРП, выпрямитель В и фильтр Ф (рис. 1), представлен идеальным источником постоянного напряжения;
2) трансформаторы работают на линейном участке кривой намагничивания сердечников;
3) транзисторы АИН представляют собой идеальные ключи;
4) параметры кабеля связи включены в параметры кабель-троса, таким образом, рассматривается система с сосредоточенными параметрами.
Создание модели СЭП ТНПА осуществлялось последовательно, начиная от источника питания к нагрузке. При этом на каждой стадии моделирования проверялась адекватность работы каждого функционального узла системы, на основе результатов натурных экспериментов и методиках расчета параметров схем замещения системы и ее компонентов.
На рис. 2 представлена модель СЭП ТНПА с передачей энергии по кабель-тросу на переменном токе в пакете Matlab/Simulink. Функциональные блоки системы электропитания, обведенные штриховой линией соответствуют схеме, приведенной на рис. 1.
Система управления СЭП ТНПА (рис. 2) обеспечивает стабилизацию напряжения на нагрузке в диапазоне ±10% от номинального значения. Обратная связь организована по выходному напряжению АИН с использованием ПИ-регуляторов.
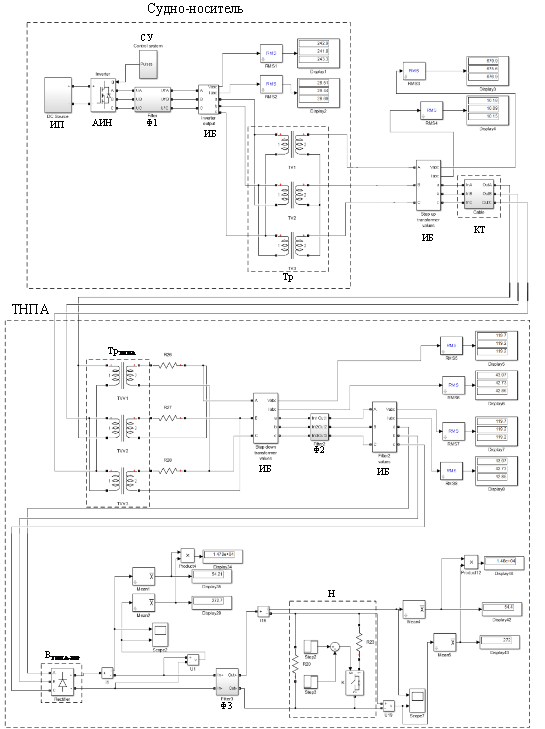
Рис. 2. Модель системы электропитания телеуправляемого необитаемого подводного аппарата с передачей энергии по кабель-тросу на переменном токе повышенной частоты
ИП – источник питания;АИН – автономный инвертор напряжения;СУ – система управления; Ф1 – фильтр на выходе АИН;ИБ – измерительный блок; Тр – повышающий трансформатор; КТ – кабель-трос; ТрТНПА – понижающий трансформатор;Ф2 – фильтр на выходе понижающего трансформатора; ВТНПА-300 – выпрямитель;Ф3 – фильтр на выходе выпрямителя; Н – нагрузка.
В качестве закона управления АИН был использован алгоритм векторной широтно-импульсной модуляции (ШИМ) с предмодуляцией третьей гармоники, который обеспечивает увеличение амплитуды основной гармоники, при этом в спектре ШИМ помимо основной гармоники содержатся гармоники нулевой последовательности, т.е. гармоники, кратные трем. Тем самым обеспечивается отсутствие в низкочастотной части спектра фазных и линейных напряжений инвертора гармоник искажения[5].
Результаты моделирования
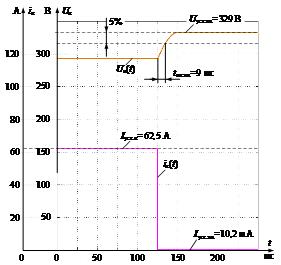
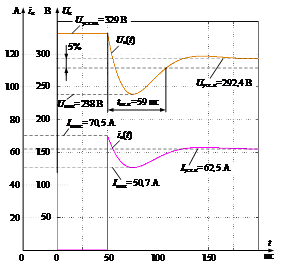
На рис. 3 представлены осциллограммы выходного напряжения СЭП ТНПА при сбросе и набросе тока нагрузки, полученные на математической модели в пакете Matlab/Simulink.
а) б)
Рис. 3. Осциллограммы выходного напряжения СЭП ТНПА, полученные на математической модели в пакетеMatlab/Simulink:
а) сброс тока нагрузки, б) наброс тока нагрузки
![]() – установившееся значение напряжения при номинальной
нагрузке;
– установившееся значение напряжения при номинальной
нагрузке;![]() – минимальное значение напряжения при
переходном процессе;
– минимальное значение напряжения при
переходном процессе;![]() – установившееся значение тока
при номинальной нагрузке;
– установившееся значение тока
при номинальной нагрузке;![]() – минимальное
значение тока при переходном процессе;
– минимальное
значение тока при переходном процессе;![]() –
время переходного процесса при ступенчатом изменении нагрузки от холостого хода
до номинальной;
–
время переходного процесса при ступенчатом изменении нагрузки от холостого хода
до номинальной;![]() – время переходного процесса
при ступенчатом изменении нагрузки от номинальной до холостого хода
– время переходного процесса
при ступенчатом изменении нагрузки от номинальной до холостого хода
На рис.4 представлены осциллограммы выходного напряжения СЭП ТНПА при сбросе и набросе тока нагрузки, полученные экспериментально на макетном образце (рис.5).
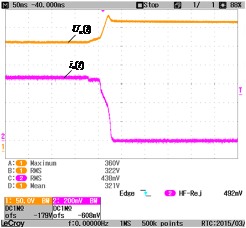
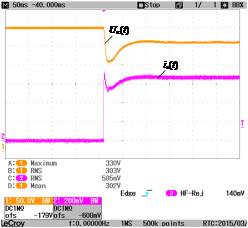
а) б)
Рис. 4. Осциллограммы выходного напряжения СЭП ТНПА, полученные экспериментально на макетном образце
а) сброс тока нагрузки, б) наброс тока нагрузки

Рис. 5. Макетный образец системы электропитания телеуправляемого необитаемого подводного аппарата
1 – бортовая часть системы электропитания; 2 – пульт дистанционного управления; 3 – система электропитания телеуправляемого необитаемого подводного аппарата; 4 – система электропитания гаража-заглубителя
Сопоставление результатов математического моделирования СЭП ТНПА с передачей энергии по кабель тросу на переменном токе повышенной частоты в пакете Matlab/Simulink (рис. 3) с результатами экспериментальных исследований (рис. 4) показало, что расхождение во времени переходного процесса, перерегулировании при сбросе и набросе тока нагрузки составляет не более 10%. Количество пульсацийвыходного напряжения в указанных режимах совпадает. Таким образом, полученные результаты подтверждают адекватность разработанной модели.
Выводы
1. Разработана и подтверждена адекватность математической модели СЭП ТНПА с передачей энергии по кабель-тросу на переменном токе повышенной частоты в пакете Matlab/Simulink.
2. Математическая модель СЭП ТНПА позволяет исследовать статические и динамические режимы работы в процессе проектирования и создания высокоэффективных систем электропитания с погрешностью не более 10%.
Рецензенты:
Лукутин Б.В., д.т.н., профессор, профессор кафедры электроснабжения промышленных предприятий Национального исследовательского Томского политехнического университета, г. Томск;
Шиняков Ю.А., д.т.н., директор Научно-исследовательского института космических технологий Томского государственного университета систем управления и радиоэлектроники, г. Томск.
Библиографическая ссылка
Рулевский В.М., Ляпунов Д.Ю., Ляпунов Д.Ю. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ ТЕЛЕУПРАВЛЯЕМОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА С ПЕРЕДАЧЕЙ ЭНЕРГИИ ПО КАБЕЛЬ-ТРОСУ НА ПЕРЕМЕННОМ ТОКЕ В ПАКЕТЕ MATLAB/SIMULINK // Современные проблемы науки и образования. 2015. № 2-1. ;URL: https://science-education.ru/ru/article/view?id=20930 (дата обращения: 02.07.2025).