



Государственная программа России определяет снижение энергоёмкости валового внутреннего продукта. В лесной отрасли острейшей проблемой является высокая затратность лесозаготовительного производства. Как известно, традиционная технология промышленного лесопользования основана на использовании современной техники с соблюдением лесоводственных и технологических требований, регламентирующих работу лесопромышленных агрегатов (ЛПА). Вместе с тем такой подход не позволяет радикально решить проблему энергоэффективности. Одним из путей повышения эффективности промышленного лесопользования является автоматизация и применение прецизионных технологий. Однако применение точных лесозаготовительных технологий и их автоматизация ограничивается целым рядом технических проблем, связанных как с точностью позиционирования лесных агрегатов, так и со сложностями их автоматизированного управления в реальных условиях.
Анализ систем позиционирования, их точности местоопределения и мобильного ориентирования показал, что в первую очередь для этих целей используются спутниковые системы глобального позиционирования ГЛОНАСС, GPS и Galileo. Наибольшую точность позиционирования (2-3 м) дает GPS/ГЛОНАСС. По заявлениям Роскосмоса, «в ближайшее время точность системы ГЛОНАСС повысится до 0,6 м. Тем не менее, в настоящее время обеспечить более высокую (до 1-2 см) точность глобального позиционирования в реальных условиях возможно только с добавлением еще и локальной системы позиционирования» [1].
Локальные системы позиционирования иначе т.н. "автопилотные" функции включают системы управления (слежения за курсом) и распознавания препятствий, доступные не только в авиации и флоте, но и во многих современных моделях автомобилей. Подобные системы действуют за счет анализа данных из нескольких источников – различных локационных маяков и видеокамер, ультразвуковых, тепловых или лазерных сканеров. В свою очередь применение в лесных условиях перечисленной совокупности технических средств позиционирования затруднительно, так как деревья существенно различаются по форме и могут быть как предметом труда (ПТ) скрытыми порослью так и препятствием и охраняемыми объектами одновременно. При этом проблемы с обзором и наводкой технологического оборудования не только снижают производительность [2], но и повышают энергозатратность производства.
Анализ путей решения подобных противоречий показал, что автоматизация лесосечных работ невозможна без применения методов локального бортового позиционирования в реальных условиях под пологом леса [3]. Кроме того необходимо обеспечить гарантированную работоспоспособность лесосечных агрегатов в автоматическом режиме управления а это предопределяет использование адаптивных беспоисковых алгоритмов с обратной связью [4]. Одним из эффективных методов является использование виртуального пространства среды функционирования, в котором производится оценка состояния управляемой системы (взаимного положения объекта управления и ПТ), что в данном случае можно трактовать как носитель обратной связи [5].
Экспериментальное исследование объектов сложной пространственной структуры на базе виртуальных моделей показало, что с ростом количества взаимосвязанных элементов существенно увеличиваются затраты времени и средств на создание непосредственно модели, программ и систем автоматического управления (САУ) [6]. В целях упрощения моделирования, составления программ управления и повышения их надежности в работе [7] было предложено разделить навигационные и управляющие блоки САУ, где позиционирование осуществляется не всей системы в целом, а непосредственно опорных точек системы перемещения и базирования технологического оборудования. При этом управление манипуляционными действиями исполнительного оборудования и его позиционирование моделируется и планируется в САУ как функциональная зависимость от позиций опорных точек базовой системы. Тогда, при условии создания корректной пространственной модели лесного участка, отпадает потребность в поиске ПТ, достаточным будет позиционирование с заданной точностью опорных точек базовой системы.
Основное содержание метода автоматического управления информационными потоками, отождествляемыми с производственными процессами и функционированием лесных агрегатов, раскрывается на схемах (рис.1-3) и в приведенном ниже алгоритме.
1) Предварительно осуществляется сбор данных об участках лесного фонда из: различных схем, карт, таблиц и материалов дистанционного зондирования земли (ДЗЗ) в виде гиперспектральных снимков передаваемых искусственными спутниками.
2) Определяется (по данным п.1) участок лесного фонда предварительно пригодный для лесозаготовительных работ, территория которого подвергается аэросъёмке лазерной системой ДЗЗ (LiDAR). Здесь необходимо так подобрать параметры лазерной съемки, чтобы обеспечивалась возможность идентификации стволов деревьев.
3) В результате синхронизации данных п.1 и п.2, с применением геоинформационных технологий (ГИТ), осуществляется их географическое кодирование и формирование трехмерной цифровой модели (ЦМ) рельефа (ЦМР), и пространственное цифровое моделирование выбранного участка леса (лесосеки) (ЦМЛ), в виртуальной среде которой точечно (по центрам стволов) отображается расстановка деревьев. Расположение каждого дерева, отражается в двухкомпонентной системе позиционирования (глобальное и аэро-локальное) и одновременно используется в качестве локальных навигационных привязок к ЦМЛ (т.е. как некой электронной локальной системы навигационно-реперного позиционирования ЛПА на местности) и в роли объектов для наведения технологического оборудования на ПТ.
4) Имея данные п.1-3 с помощью интегрированных внешних моделей производится расчет геометрических параметров деревьев (диаметр, сбежистость ствола и пр.), прогнозирование качества древесных ресурсов и формирование банка сортиментного выхода (с адресной привязкой потенциальных древесных ресурсов), что в совокупности позволяет наполнить атрибуты ЦМЛ.
5) В виртуальной среде имеющейся ЦМЛ (по данным п.1-4) с применением интегрированной с ГИТ автоматизированной системы технологической подготовки производства (АСТПП) и системы экспертного советника (лицом принимающим решение (ЛПР)) удаленно осуществляется электронный отвод лесосеки в рубку (создание электронных визиров, границ, документации и т.п.), а также последовательный выбор:
- уровня антропогенного воздействия на лесную среду (т.е. процента выборки деревьев, доли сохранения подроста, молодняка и семенных куртин и пр.)
- конкретно выделенного (поштучного) перечня деревьев, подлежащих рубке (например, согласно заказу потребителей) и их электронная маркировка в ЦМЛ;
- принципиальной схемы технологических действий на данном участке из перечня потенциально возможных;
- оптимальных путей (их трассировка в ЦМЛ) следования ЛПА и мест технологических стоянок, обеспечивающих однозначную досягаемость к ПТ;
- рациональных путей транспортировки ПТ (трассировка в ЦМЛ).
- способ представления и генерирование разрешительной, технологической и технико-экономической документации для утверждения и согласования.
6) Далее осуществляется формирование виртуальной модели ЛПА, состоящей из модели трассирования опорных точек и математических пространственных моделях функционально зависимого (от положения опорной точки см. рис.2-3) исполнительного технологического оборудования.
7) Создание и отладка программ САУ ЛПА могут быть построены на виртуальных технологиях позиционирования [8], математических и пространственных моделях, определенных в п.2-6 [9], с помощью специализированных программных комплексов, например [10] и функциональных зависимостях исполнительного технологического оборудования, например [12]. Тогда в целях повышения точности позиционирования опорных точек ЛПА под пологом леса и обеспечения гарантированной работоспоспособности автоматически управляемых лесосечных агрегатов в реальных условиях необходимо и достаточно применение бортового лазерного сканера кругового обзора (БЛКО) (см. рис.1), интегрированного в САУ ЛПА и синхронизированного с виртуальной средой ЦМЛ.
8) В соответствии с программой САУ (п.7) ЛПА прибывает на стартовую точку реальной лесосеки (см. рис.2).
9) После осуществляет сканирование БЛКО реальной лесосеки и после обработки данных выполняется их сравнение с виртуальной средой ЦМЛ (п.3-4). В случае расхождения данных позиционирования фактической стартовой точки и ее виртуального образа (см. рис.2, 3) осуществляется корректировка программы САУ ЛПА на величину ошибки позиционирования (синхронизация виртуальной и реальной лесосеки).
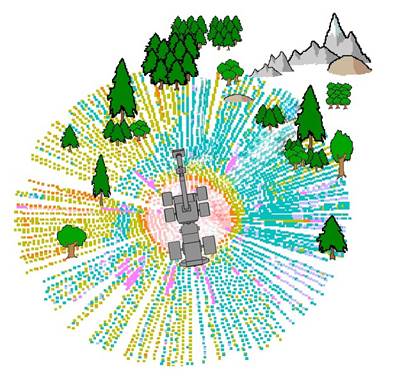
Рис. 1. Схема работы бортового локального лазерного сканера кругового обзора.
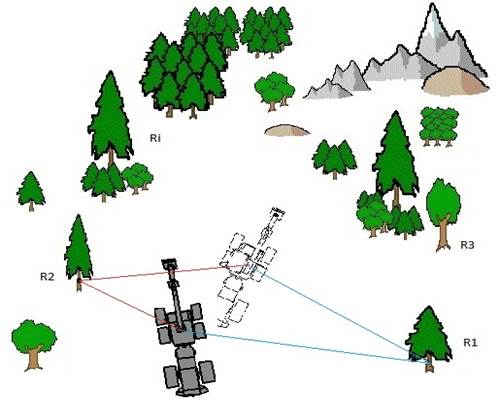
Рис. 2. Схема работы системы идентификации и коррекции стартовой ошибки позиционирования агрегата в реальной лесосеке.
10) Далее ЛПА (в соответствии с его программой управления) перемещается к первой (далее i-й) технологической стоянке, где выполняет соответствующую итерацию действий предусмотренных п.9 и технологическое задание (i-й стоянки) вплоть до выполнения всей программы управления.
11) Учет всех изменений и перемещений ПТ, и выполняемых действий ЛПА регистрируется только в части их отклонения от программы САУ ЛПА, что позволяет их фиксировать в режиме реального времени, например на сервере диспетчера.
12) Маркировка произведенной продукции построена на моделях п.3-7 алгоритма и выполняется автоматически (см. рис.3) с использованием пассивных (без источника питания) электронных идентификаторов (например, путем их вбивания в спиленный торец). Номер идентификатора привязывается к конкретному сортименту, его атрибутам и данным о месте произрастания дерева и др. [8].
13) В целях обеспечения гарантированного сохранения данных маркировки в случае утраты электронного идентификатора (п.12) его уникальный номер прописывается (дублируется) в видеозаписи и может быть при необходимости восстановлен.
14) Считывание номеров идентификаторов (п.12) может осуществляться практически в любом месте и при любых условиях одним из известных способов, например, при помощи электромагнитного резонатора и сканера откликов электронных идентификаторов (путем введения в резонанс их пассивных контуров электропитания). При этом современный уровень пассивных электронных идентификаторов и считывающих систем позволяет идентифицировать как один маркированный сортимент, так и пакет сортиментов (в некотором их множестве).
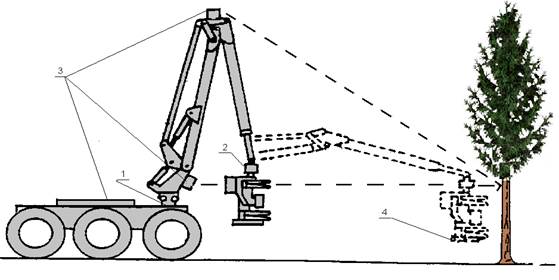
Рис. 3. Схема работы бортовой САУ (где, 1 - опорная точка базовой системы, 2 - технологическое оборудование, 3 – САУ с БЛКО, 4 – маркировщик).
Таким образом, разработанные метод и алгоритм управления ЛПА обеспечивают возможность прецизионно выполнять технологическое задание и необходимую точность двухкомпонентного иерархического позиционирования и управления под сомкнутым пологом леса.
Инженерный результат и целесообразность применения предложенного в работе метода моделирования и управления лесосечными процессами и агрегатами состоят в применении трехмерного математико-картографического моделирования реальных лесных ресурсов в реальном времени с необходимой детализацией рельефа, предметов труда (поэлементно) для обеспечения эффективного прецизионного управления агрегатами, а также полного учета добытых лесных ресурсов. Автоматизация работы лесосечных агрегатов (за счет выбора оптимальных параметров маршрута следования лесозаготовительной машины, наводки и перемещения технологического оборудования) потенциально открывает резервы повышения производительности, экономии затрат энергии и времени.
Рецензенты:
Герц Э.Ф., д.т.н., профессор, директор «Института лесного бизнеса и дорожного строительства» ФГБОУ ВПО Уральский государственный лесотехнический университет, г. Екатеринбург.
Рябухин П.Б., д.т.н., профессор, декан факультета «Природопользования и экологии» ФГБОУ ВПО Тихоокеанский государственный университет, г. Хабаровск.
Библиографическая ссылка
Казаков Н.В., Садетдинов М.А., Кривошеева Р.Н. МЕТОД УПРАВЛЕНИЯ ЛЕСНЫМИ АГРЕГАТАМИ И АСПЕКТЫ ТОЧНОСТИ ИХ ПОЗИЦИОНИРОВАНИЯ // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/ru/article/view?id=16835 (дата обращения: 06.07.2025).