



В процессе эксплуатации лазер – робота может происходить изменение углового положения отклоняющих зеркал вследствие температурных и упругих деформаций элементов конструкции манипулятора и лучепровода. Указанные отклонения могут привести к значительным не допустимым смещениям положения луча на фокусирующей линзе вплоть до потери работоспособности. Ввиду этого необходима постоянная поднастройка (юстировка) компонентов оптического тракта в автоматическом режиме.
При аналитическом исследовании характеристик оптического тракта можно воспользоваться аналитическими выражениями, приведенными ниже. На отклоняющих зеркалах происходит изменение направления потока энергии излучения, сопровождающееся ее потерями. Поэтому преломления луча целесообразно характеризовать геометрическими параметрами и показателями потерь энергии, используя для этого совокупность своеобразных четырехполюсников [5]. В декартовых однородных координатах i-му преломлению лазерного луча будет соответствовать четырехполюсник:
![]() ,
(1)
,
(1)
где ![]() и
и
![]() - блочные векторы параметров на входе и
выходе четырехполюсника,
- блочные векторы параметров на входе и
выходе четырехполюсника, ![]() - блочная
диагональная матрица связи. Раскроем выражение (1):
- блочная
диагональная матрица связи. Раскроем выражение (1):
![]()
 .
(2)
.
(2)
Здесь ![]() -
трехмерные векторы входных и выходных параметров мощности и положения лазерного
луча;
-
трехмерные векторы входных и выходных параметров мощности и положения лазерного
луча; ![]() и
и ![]() -
однородные матрицы преобразования векторов. Эти матрицы имеют вид:
-
однородные матрицы преобразования векторов. Эти матрицы имеют вид:

![]() ;
;
![]() .
(3)
.
(3)
В выражениях (3) ![]() - матрица направляющих косинусов размером
3х3 отклонения луча по обобщенной координате
- матрица направляющих косинусов размером
3х3 отклонения луча по обобщенной координате ![]() diag
diag![]() - диагональная матрица размером 3х3
потерь энергии излучения.
- диагональная матрица размером 3х3
потерь энергии излучения.
На основании выражения (1) для всех преломлений лазерного луча можно записать:
![]() ,
(4)
,
(4)
где ![]() ;
;
![]() ;
; ![]() ;
;
![]() .
.
Выражение (4) характеризует геометрические и энергетические показатели оптического тракта в связанных обобщенных координатах Н. Для определения положения луча относительно некоторого базиса МНО можно воспользоваться матричным однородным преобразованием:
![]() ,
(5)
,
(5)
где MHO и MHV - матрицы размером 4х4, определяющие
ориентацию входного и сфокусированного отрезков луча и положение точки фокуса в
базовой системе координат; ![]() .
.
Связь между Н и П – координатами можно определить рекуррентным матричным соотношением
НО=DПН·ПV-HV, (6)
где DПH=2Е – однородная скалярная матрица; ПV – вектор П-координат, скорректированных системой юстировки.
На рисунке 1 представлен вид оптического тракта, встроенного в манипулятор лазер -робота. Манипулятор робота имеет пять степеней подвижности, три из которых поступательные и две вращательные, расположенные в оптической головке. Кроме этого в оптическом тракте имеется компенсационная петля, поворачивающая луч на 180 градусов и служащая для обеспечения постоянства длины оптического тракта при движении манипулятора. Источник лазерного излучения имеет мощность 5кВт, длину волны 10,6 мкм; зеркала лучепровода кремниевые
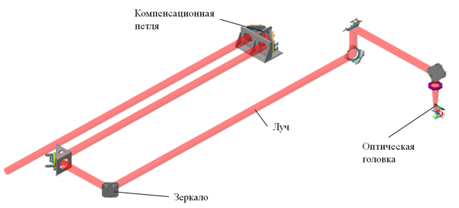
Рисунок 1 - Вид оптического тракта лазер – робота
Наряду с аналитическими методами исследования систем сегодня повсеместно применяются компьютерные технологии с использованием специализированных программных продуктов. На рисунке 2 приведена 3D компьютерная модель исследуемого оптического тракта, построенная с использованием пакета Zemax.
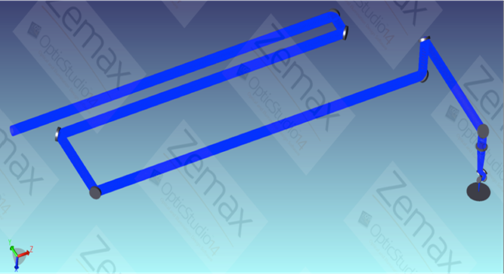
Рисунок 2- 3D компьютерная модель оптического тракта
Для построения системы автоматической юстировки оптического тракта выполнен анализ влияния смещений отклоняющих зеркал на положение луча на поверхности фокусирующей линзы. При отсутствии смещения волновой фронт излучения, приведенный на рисунке 3,а, имеет вид концентрических окружностей.
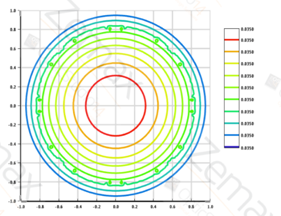
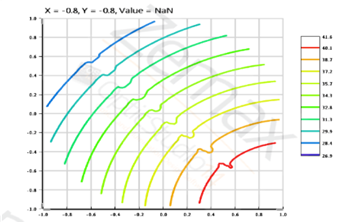
а) б)
Рисунок 3 – Волновой фронт лазерного излучения
Максимальные искажения волнового фронта наблюдаются при угловых смещениях зеркала, наиболее удаленного от фокусирующей линзы (Рисунок 3,б). Эти смещения приводят к изменениям длины волны, представленные на рисунке 4.
Кроме приведенных зависимостей выполнен анализ влияния смещений зеркал на диаметр сфокусированного пятна, доказывающий на необходимость автоматической юстировки оптической системы.
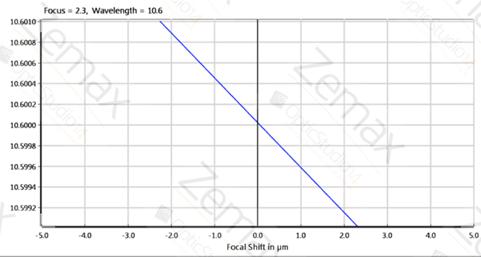
Рисунок 4 – Изменение длины волны при угловых смещениях зеркала
Поскольку автоматическая юстировка представляет собой систему стабилизации положения луча, необходим датчик обратной связи, в качестве которого может быть использован болометр [4], вид которого представлен на рисунке 5.
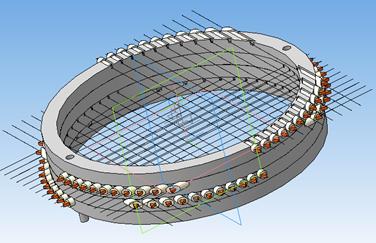
Рисунок 5 – Вид датчика
Датчик выполнен в виде четырёх соосных колец с чувствительными элементами, расположенными с шагом 1,5 мм на половине площади каждого кольца и выполненными из проволоки «нихром» марки Х20Н80, диаметром 20мкм. с изолированными керамическими капиллярами. Такое исполнение датчика, расположенного перед фокусирующей линзой, обеспечивает инвариантность измерений по координатным осям и позволяет оценить распределение плотности мощности в сечении луча. Для юстировочных перемещений отклоняющего зеркала может быть использован держатель фирмы Standa с пъзеодвигателями, обеспечивающими наклон зеркала по двум осям с разрешением 1,25 мкм.
На рисунке 6 приведена структурная схема системы юстировки, в которой отражено, что сигнал с контроллера кроме пъезоприводов держателя направлен в систему управления лазер – роботом для регулирования мощности источника излучения (при необходимости) диагностирования системы стабилизации и аварийного отключения лазера.
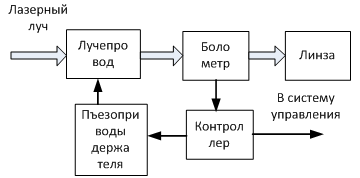
Рисунок 6 - Структурная схема системы юстировки
Пъезоприводы держателя имеют классическую структуру с внутренними контурами скорости и тока и ПИД – регуляторами, синтезированными на монотонный характер переходного процесса.
На рисунке 7 приведены результаты исследования привода юстировки на модели, построенной в интерфейсе Matlab r2014a c помощью библиотеки Simulink [2].
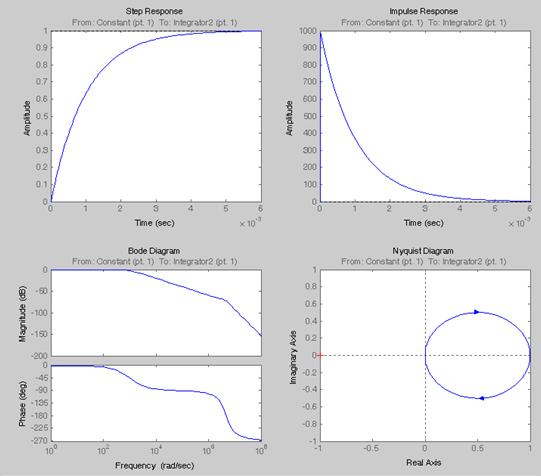
Рисунок 7 – Результаты исследования модели привода юстировки
Полученные результаты свидетельствуют о высоком быстродействии (эквивалентная постоянная времени 1,2 · 10-3 с ) и устойчивости предложенной системы.
Работа выполнена при финансовой поддержке РФФИ (проект № 13-08-01364)
Рецензенты:
Гоц А.Н., д.т.н., профессор, профессор кафедры тепловых двигателей и энергетических установок Владимирского государственного университета имени Александра Григорьевича и Николая Григорьевича Столетовых (ВлГУ), г. Владимир.
Кульчицкий А.Р., д.т.н., старший научный сотрудник, главный специалист ООО «Завод инновационных продуктов «КТЗ», г. Владимир.
Библиографическая ссылка
Умнов В.П., Егоров И.Н., Белтран Х.Г. СИСТЕМА АВТОМАТИЧЕСКОЙ ЮСТИРОВКИ ОПТИЧЕСКОГО ТРАКТА ЛАЗЕР – РОБОТА // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/ru/article/view?id=16049 (дата обращения: 27.07.2026).