



С ростом объемов добычи нефти расширяется мировая сеть нефтепроводов и связанных с ними нефтехранилищ. В процессе эксплуатации возникает необходимость очистки резервуаров нефтехранилищ и нефтепроводов, врезки труб, инспекции состояния. Данные операции сопряжены с вырезанием полостей больших размеров и сложной формы. Горючие отложения на внутренних поверхностях нефтепроводов не допускают применения для их резки методов, сопровождающихся пламенем и искрой, таких как абразивная резка и резка металлическим инструментом, электро и газорезка, лазерная резка. Здесь весьма эффективно применение процесса гидрорезания водной струей с абразивом (далее по тексту «процесс гидрорезания»). В настоящее время для этого применяются специальные приспособления, устанавливаемые на поверхностях резания и несущие головку гидрореза и систему подвода воды с абразивом. На рис. 1 показан вариант резки прямоугольного сечения на поверхности нефтехранилища (фото предоставлено ООО «Грот», г. Владимир). На рис. 1 видно, что для реализации резки используется подъемник, на котором находится мобильная часть устройства гидрорезания и два оператора. На поверхности нефтехранилища устанавливается приспособление для перемещения головки (сопла) гидрорезания по заданному профилю. Процедура вырезания поверхности сложна и трудоемка. Достаточно сложны и приспособления, устанавливаемые на рабочую поверхность и несущие сопло гидрорезания.
Широкое распространение гидрорезания нефтепроводов и нефтехранилищ ограничивается слабой степенью его автоматизации. Большие возможности открывает создание и применение автоматических комплексов на основе робототехники.
При роботизации технологических процессов в агрессивных средах необходим учет специфики выполняемого технологического процесса, ограничений со стороны объекта и внешней среды и особенностей построения системы автоматического управления (САУ). Учитывая пространственное расположение объектов резания здесь эффективно применение специализированного мобильного технологического робота (МТР), состоящего из мобильного робота (МР) и расположенного на нем технологического робота (ТР), в схвате или специальном приспособлении которого находится головка гидрорезания струей жидкости с абразивом. Мобильный и технологический робот рассматриваются как две последовательно соединенные системы, работающие в условиях возмущений со стороны внешней среды и объекта. Особенность задачи состоит в организации управления мобильным технологическим роботом в условиях неопределенности рельефа местности в малом для транспортного робота и неопределенности пространственного расположения поверхности резания для объекта резания, а также в условиях ограничений со стороны элементов конструкции нефтепроводов и нефтехранилищ.
 а)
а)
 б)
б)
Рис. 1. Вырезание прямоугольного сечения на нефтехранилище
Задача построения мобильного робототехнического комплекса гидрорезания поверхностей нефтепроводов и нефтехранилищ предусматривает анализ, рассмотрение и решение следующих основных вопросов.
1. Требования и особенности системы автоматического управления МТР. Система автоматического управления робота состоит из двух последовательно соединенных систем – мобильного и транспортного робота. Регулируемой координатой системы являются координаты режущей кромки гидрореза, перемещаемого по технологической траектории над поверхностью резания. При движении по программной технологической траектории следует обеспечивать стабилизацию расстояния режущей кромки головки гидрореза от поверхности резания в диапазоне (2-3) мм с точностью не ниже 0,2 мм. Ошибки траекторного перемещения головки определяются векторными ошибками выхода в исходную точку МР и непосредственно перемещения головки ТР.
Требования к системе управления комплексом определяются, в свою очередь, требованиями к системе управления движением как мобильного, так и технологического роботов. Для мобильного робота это: траектория движения, рельеф местности, габариты и вид поверхностей объекта гидрорезания, точность выхода на исходную технологическую позицию. Для технологического робота - габариты и вид поверхностей объекта гидрорезания, точность движения по технологической поверхности и стабилизация расстояния режущей кромки головки гидрореза от технологической поверхности; расположение поверхности в пространстве и ее не полная определенность.
2. Вид кинематики и размеры плеч технологического робота. Определяющими факторами здесь являются вид и расположение объектов, с которыми взаимодействует МТР, в пространстве, а также размеры поверхностей резания. В зависимости от расположения труб относительно уровня поверхности выделяют следующие виды нефтепроводов: наземные, подземные (ниже уровня на 1-2 метра), надземные (выше уровня на 2-4 метра). Среди же основных поверхностей резания можно выделить: 1) для нефтехранилищ -прямоугольник с большими размерами (до 4x3 метра) при виде по нормали к поверхности; 2) для нефтепроводов вид вырезаемых поверхностей - прямоугольник, окружность, эллипс и др. при виде по нормали к образующей поверхности трубы в центре вырезаемого профиля. Создание универсального МТР для обозначенных видов объектов весьма проблематично. Следует определить требования для каждого случая, выбрать «свои» кинематики и размеры плеч и проанализировать варианты их совместимости с позиции возможной реализации. На рис. 2 представлен один из вариантов расположения звеньев мобильного технологического робота.
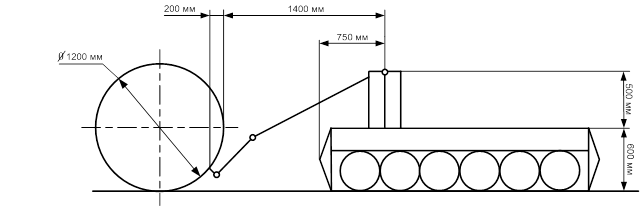
Рис.2. Расположение звеньев МРТ
3. Анализ технологических траекторий и требования, предъявляемые к технологическому роботу. Данные аспекты определяются видом вырезаемого профиля, расположением и определенностью поверхностей в пространстве, а также требованиями со стороны непосредственно процесса гидрорезания. Вид вырезаемых поверхностей определяет траектории движения головки гидрореза.
Для нефтехранилищ – это прямоугольные поверхности при виде по нормали спереди с максимальными размерами 4x3 м или прямоугольник с размерами 0,5x1 м. При этом образующие представляют собой: по вертикали – прямую линию, по горизонтали – окружность (наружный профиль).
Для трубопроводов – это прямоугольник с размерами до 0,5x1,0 м или окружность при виде по нормали к поверхности с размерами до максимального диаметры трубы. В последнем случае имеем поверхность в виде пересечения двух цилиндров под прямым углом и эллипс при другом угле. Типоразмеры труб 200-1200 мм.
4. Управление траекторией движения головки гидрореза по не полностью определенной поверхности резания в пространстве. Здесь следует, прежде всего, рассматривать параметры движения в большом и в малом. Параметры рельефа в большом для МР могут быть получены с помощью системы технического зрения или системы спутниковой навигации. Для определения параметров движения в малом, при тактическом управлении мобильным роботом, необходимо применять как аппаратные средства в виде системы технического зрения, так и алгоритмы, программные продукты, прогнозирующие рельеф местности.
Для определения координат расположения поверхности резания в пространстве могут быть использованы несколько вариантов. Один из них подразумевает пробный проход или движения головки гидрореза с информационными датчиками контроля расстояния от поверхности и соответствующей обработкой этой информации. Другой вариант определения координат расположения поверхности резания состоит в пробном или рабочем движении с использованием алгоритмов прогнозирующего управления. Как в первом, так и во втором случае необходима коррекция управляющей программы на тактическом исполнительном уровне. Здесь эффективно можно использовать алгоритмы адаптивной коррекции программного движения на основе третьей и четвертой форм инвариантности. При этом возможны два способа коррекции. Первый предусматривает введение дополнительного управления на вход следящих приводов плеч ТР в функции отклонения программной траектории от фактической. Второй состоит в коррекции управляющих для приводов воздействий на стадии их формирования.
Выводы
-
Для роботизации процесса гидрорезания нефтепроводов и нефтехранилищ целесообразно использовать специализированный мобильный робототехнический комплекс, состоящий из мобильного робота и расположенного на нем технологического робота, в схвате или специальном приспособлении которого находится головка гидрорезания струей жидкости с абразивом.
-
В зависимости от конструктивного расположения нитки нефтепровода (подземный, наземный, на эстакаде) требуется своя компоновка комплекса, и непосредственно технологического робота резки.
-
При ориентации в пространстве головки гидрорезания необходимо учитывать неопределенность технологической поверхности в малом. Здесь эффективна межкоординатная коррекция координатных приводов или коррекция начальной управляющей программы.
-
Для обеспечения расположения сопла гидрореза по нормали к поверхности требуется введение в конструкцию исполнительного устройства технологического робота датчиков контроля расстояния до поверхности резания.
Рецензенты:
Гоц А.Н., д.т.н., профессор кафедры «Тепловые двигатели и энергетические установки», ФГБОУ ВПО «Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых», г. Владимир.
Кульчицкий А.Р., д.т.н., доцент, главный специалист ООО «Завод инновационных продуктов «Концерн тракторные заводы»», г. Владимир.
Библиографическая ссылка
Архипов А.Н., Кобзев А.А., Лекарева А.В., Махфуз А.А., Петухов Е.Н. АНАЛИЗ РОБОТИЗАЦИИ ПРОЦЕССА ГИДРОРЕЗАНИЯ НЕФТЕПРОВОДОВ // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/ru/article/view?id=15697 (дата обращения: 02.07.2025).