


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
INFERENCE TREE OF THE INTELLECTUAL SYSTEM OF THE VIRTUAL ROBOT’S OPERATION

Введение
Испытание управляющих программ роботов на компьютерных симуляторах является современным и актуальным направлением развития программного обеспечения поддержки робототехники [8].
Цель
В данной работе предпринята попытка интеллектуализации системы симуляции робота с программным управлением. Решение данной задачи в аналогичных программных системах других разработчиков пока не получено.
Материалы и методы
Итогом работы [7] стало получение матрицы (1), элементы которой выражают положение конечного органа манипулятора робота в абсолютной системе отсчёта координат.
 (1)
(1)
Для компактности записи элементы матрицы T70 под индексами T1,4, T2,4, T3,4, T4,4 будут представлены в виде отдельного вектора T1-4,4 (2).
 , (2)
, (2)
где d1, d3, d5, d7 – обобщённые координаты сочленений 1, 3, 5, 7 (поступательных) соответственно;
θ2, θ4, θ6 – обобщённые координаты сочленений 2, 4, 6 (вращательных) соответственно.
Итак, элементы T1,4 и T3,4 являются соответственно формулами координат х и у конечного звена манипулятора. Полученные зависимости выражают параметры вектора выходных данных w(ts) виртуального робота, а в качестве аргументов используют переменные вектора состояния g(ts), такие как обобщённые координаты углов поворота и линейных перемещений звеньев. Именно параметры вектора w(ts) являются ключевыми данными, необходимыми интеллектуальной системе для осуществления анализа функционирования объекта управления.
Дадим определение тем областям пространства, в которых изменяются исследуемые координаты манипулятора.
У манипуляционных устройств роботов выделяют базовую плоскость, т.е. плоскость, которая образована плечом и предплечьем манипулятора и в которой могут располагаться одновременно оси всех его звеньев.
Зоной обслуживания манипуляционного робота называют совокупность точек базовой плоскости, которых может достигать схват манипуляционного устройства [4].
Поскольку исследуемый манипулятор действует в плоской системе координат и в своей структуре имеет как поступательные, так и вращательные степени подвижности, его зона обслуживания имеет форму сектора, изнутри ограниченного кругом. При анализе перемещений манипулятора в зоне обслуживания допускается введение условного разбиения зоны обслуживания на участки. Участки характеризуются своим пространственным положением, т.е. значениями декартовых прямоугольных координат, относительно нулевой точки отсчёта в зоне обслуживания манипулятора. Примем зону обслуживания исследуемого манипулятора разбитой на девять участков. По оси Y группы участков под номерами 1, 2 и 3 считаются нижними, 4, 5 и 6 средними и 7, 8 и 9 верхними соответственно. По оси Х также три группы участков: ближние (под номерами 1, 4 и 7), средние (2, 5, 8) и дальние (3, 6, 9).
Диапазон практического применения промышленных роботов довольно широк [1; 5]. В рамках задачи создания интеллектуальной системы функционирования выбранного манипулятора решено рассмотреть наиболее распространённый в робототехнике технологический процесс – роботизированную загрузку станка. Этот процесс характеризуется следующими закономерностями:
- схват манипулятора, первоначально располагаясь в ближнем среднем участке (участок 4), движется в положение взятия объекта (заготовки), для дальнейшей его загрузки в станок;
- приспособление, предоставляющее объект схвату для взятия, располагается в ближнем нижнем участке зоны обслуживания манипулятора (участок 1);
- положение загрузки объекта в станок находится в дальнем среднем участке зоны обслуживания (участок 6);
- в зависимости от конкретного расположения принимающего устройства станка возможны различные способы загрузки роботом в станок – вертикальное (движение схвата из участка 9 в 6) или горизонтальное (движение схвата из участка 5 в 6);
- между операциями разжатия и сжатия схвата при взятии объекта осуществляются временные задержки;
- продолжительное пребывание неразжатого схвата в участке взятия объекта для загрузки представляет опасность аварии, так как возможно столкновение объекта, подаваемого транспортной системой, со схватом.
Результаты и их обсуждение
Используя данные закономерности и опираясь на теоретические способы представления знаний [3; 6], построим дерево логического вывода для интеллектуального анализа функционирования виртуального робота (рис. 1).
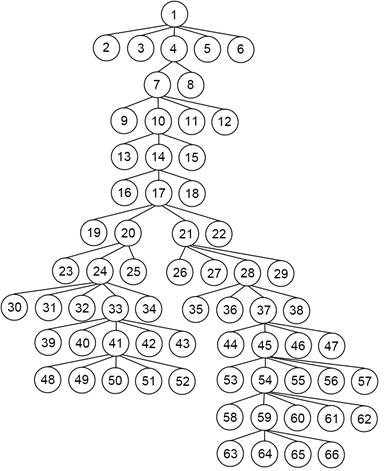
Рисунок 1 – Дерево логического вывода
На этапе дерева до разветвления ключевыми позициями являются 1, 4, 7, 10, 14, 17. В них производится идентификация цикла робота по первичным действиям – перемещение схвата из начального положения, взятие объекта и подготовка к последующей загрузке. Далее дерево разветвляется на идентификацию цикла горизонтальной либо вертикальной загрузки объекта. Ключевые позиции для этих двух ветвей 20, 24, 33, 41, 51 и 21, 28, 37, 45, 54, 59, 64 соответственно. В случае выполнения описанных последовательностей правил цикл считается идентифицированным. Позиции 51 и 64 являются логическим завершением соответствующих ветвей. Позиции 50 и 65 обнаруживают возникновение нештатного события при реализации цикла. Остальные позиции содержат правила, заключающие, что цикл идентифицировать не удалось.
Рассматривая подробнее базу знаний создаваемой интеллектуальной системы, выборочно приведём основные факты интеллектуальной системы.
Для первой ветки вывода:
Схват в начальном положении, Завершение загрузки объекта, Схват покинул зону взятия объекта.
Для второй ветки вывода:
Схват прошел один участок в направлении горизонтальной выгрузки, Ожидание горизонтальной выгрузки объекта, Цикл горизонтальной выгрузки объекта идентифицирован.
Для третьей ветки вывода:
Схват достиг положения вертикальной выгрузки, Завершение выгрузки объекта, Цикл вертикальной выгрузки объекта идентифицирован.
Общие для всех веток (числами в именах фактов обозначены номера участков):
Переход из 1 в 4, Переход из 3 в 6, Переход из 6 в 5, Переход из 6 в 9, Переход из 7 в 8, Ожидание, Цикл не идентифицирован, Разжатие схвата, Сжатие схвата.
Выборочно приведём основные правила базы знаний.
Правило 17: Если Завершение загрузки объекта и Переход из 1 в 4, то Схват покинул зону взятия объекта.
Правило 22: Если Схват покинул зону взятия объекта и Разжатие схвата, то Цикл не идентифицирован.
Правило 51: Если Ожидание горизонтальной выгрузки объекта и Переход из 6 в 5, то Цикл горизонтальной выгрузки объекта идентифицирован.
Правило 64: Если Ожидание вертикальной выгрузки объекта и Переход из 6 в 9, то Цикл вертикальной выгрузки объекта идентифицирован.
Заключение
Таким образом, получены все необходимые теоретические составляющие интеллектуальной системы, способной самостоятельно, без участия оператора, анализировать функционирование виртуального робота и идентифицировать осуществляемые им процессы. Данная структура и содержание базы знаний делают возможной техническую реализацию экспертной системы с механизмом прямого логического вывода на языке программирования высокого уровня [2].
Рецензенты:
Видовский Леонид Адольфович, д.т.н., доцент, профессор кафедры ИСП, ФГБОУ ВПО «Кубанский государственный технологический университет», г. Краснодар.
Максименко Людвиг Александрович, д.т.н., профессор, профессор кафедры ИСП, ФГБОУ ВПО «Кубанский государственный технологический университет», г. Краснодар.
Библиографическая ссылка
Частиков А.П., Тотухов К.Е., Урвачев П.М. ДЕРЕВО ЛОГИЧЕСКОГО ВЫВОДА ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ ФУНКЦИОНИРОВАНИЯ ВИРТУАЛЬНОГО РОБОТА // Современные проблемы науки и образования. 2013. № 2. ;URL: https://science-education.ru/en/article/view?id=8976 (дата обращения: 11.07.2026).